一种基于激光点云的巷道形变实时检测方法、装置及存储介质
本发明涉及巷道形变检测,更具体的说是涉及一种基于激光点云的巷道形变实时检测方法、装置及存储介质。
背景技术:
1、井下巷道在提升、运输、通风、排水等采矿生产活动中起着举足轻重的作用。随着开采深度的不断增加,相较于浅部巷道,深部巷道所处的高应力围岩力学环境往往更为复杂,通常呈现出非连续性、非协调性大形变、大范围失稳破坏等一系列工程响应问题,其产生的形变破坏往往会阻断井下运输,增大通风阻力,造成人员伤亡,设备损坏等,对生产安全构成严重威胁。因此,实现巷道形变的高效、精确感知,对巷道支护、动力灾害防治、矿山压力与岩层运动规律的研究具有重要意义。
2、传统形变监测方法主要基于以全站仪、数显收敛计、顶板离层仪为代表的位移数据和钻孔应力计为代表的应力数据。但是这些技术通常需要在巷道表面预置点位,通过测量不同时期固定点位之间的相对位移或应力变化来反映其形变程度,难以实时、直观地对巷道整体的变化场进行度量。
3、除此之外,上述方法往往需要工作人员携带设备前往现场进行操作,需要耗费大量人力物力成本,其度量结果也高度依赖于人的主观性,容易造成形变位置的漏判或误判。
4、可见,对巷道进行形变检测的传统方法主要是基于位移数据(如数显收敛计、顶板离层仪等)或应力数据(如钻孔应力计等),存在安装、测量过程复杂,计算效率与检测精度低等问题。
技术实现思路
1、有鉴于此,本发明提供了一种基于激光点云的巷道形变实时检测方法、装置及存储介质,旨在实现对巷道中发生的形变进行高效、精确地计算,操作员可以通过本发明对巷道中疑似形变区域进行精确感知,实现井下少人甚至无人化巡检。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种基于激光点云的巷道形变实时检测方法,包括以下步骤:
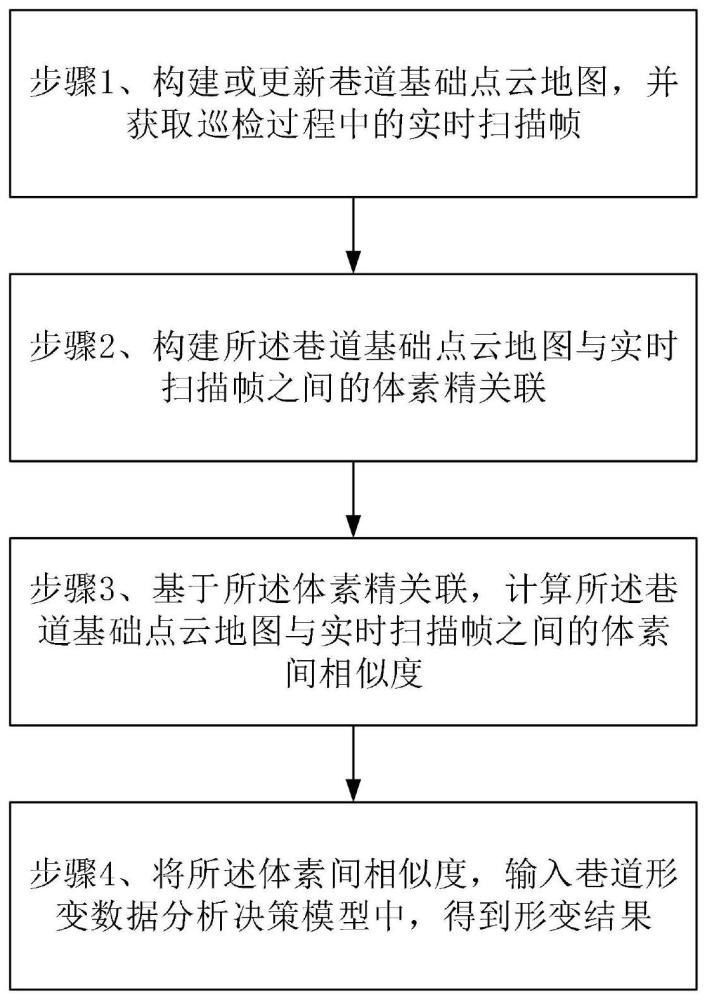
4、步骤1、构建或更新巷道基础点云地图,并获取巡检过程中的实时扫描帧;
5、步骤2、构建所述巷道基础点云地图与实时扫描帧之间的体素精关联;
6、步骤3、基于所述体素精关联,计算所述巷道基础点云地图与实时扫描帧之间的体素间相似度;
7、步骤4、将所述体素间相似度,输入巷道形变数据分析决策模型中,得到形变结果。
8、可选的,所述步骤1中,使用三维激光雷达对巷道周围点云信息进行采集,基于高精度建图算法,构建或更新巷道基础点云地图,所述高精度建图算法为slam算法或sfm算法。
9、可选的,所述步骤2中,构建所述巷道基础点云地图与实时扫描帧之间的体素精关联,包括以下步骤:
10、步骤2.1、依据所述巷道基础点云地图,对所述实时扫描帧进行重定位,在重定位的基础上对实时扫描帧与巷道基础点云地图的对应位置构建体素粗关联;
11、步骤2.2、基于所述体素粗关联,对实时扫描帧与巷道基础点云地图进行配准,根据配准结果对实时扫描帧与巷道基础点云地图的对应位置构建体素精关联。
12、可选的,所述步骤2.1中,对实时扫描帧与巷道基础点云地图的对应位置构建体素粗关联的具体方法为:
13、在对实时扫描帧进行重定位后,对所述巷道基础点云地图与实时扫描帧进行体素化;
14、基于体素化关联算法,对实时扫描帧与巷道基础点云地图的对应位置构建体素粗关联。
15、可选的,所述步骤2.2中,使用vgicp算法对体素粗关联后的实时扫描帧与巷道基础点云地图进行配准;
16、根据配准结果,使用体素化关联算法,更新实时扫描帧与巷道基础点云地图对应位置之间的体素对应关系,构建体素精关联。
17、可选的,步骤3中,采用体素间马氏距离作为体素间相似度,则计算所述巷道基础点云地图与实时扫描帧之间的体素间马氏距离的方法为:
18、基于所述体素精关联,确定所述巷道基础点云地图与实时扫描帧之间的位置对应关系;
19、利用基于体素的小尺度分布来表征对应位置的巷道表面,计算体素范围内的协方差矩阵;
20、基于所述协方差矩阵,计算所有体素对之间的马氏距离,即得到所述巷道基础点云地图与实时扫描帧之间所有体素对之间的相似度。
21、可选的,所述步骤4中,巷道形变数据分析决策模型的训练方法为:
22、通过对巷道形变特定场景的数据分布先验知识的学习,获取巷道形变特定场景下的扫描帧与巷道基础点云地图;
23、按照步骤1至步骤3的方法计算巷道形变特定场景下扫描帧与巷道基础点云地图的体素间相似度;
24、以无监督孤立森林模型为待训练基础模型,以体素间相似度为输入特征,以扫描帧与巷道基础点云地图的实际形变结果作为输出特征,进行模型训练,得到巷道形变数据分析决策模型。
25、一种基于激光点云的巷道形变实时检测装置,包括:
26、扫描模块,用于获取扫描设备当前所处位置的巷道点云,构建或更新巷道基础点云地图,同时获取巡检过程中的实时扫描帧;
27、点云关联模块,用于构建所述巷道基础点云地图与实时扫描帧之间的体素精关联;
28、计算模块,用于根据所述体素精关联,计算所述巷道基础点云地图与实时扫描帧之间的体素间相似度;
29、形变分析模块,用于将所述体素间相似度,输入巷道形变数据分析决策模型中,得到形变结果。
30、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器进行加载,以执行任一项所述的一种基于激光点云的巷道形变实时检测方法中的步骤。
31、经由上述的技术方案可知,本发明提供了一种基于激光点云的巷道形变实时检测方法、装置及存储介质,与现有技术相比,具有以下有益效果:
32、本发明与基于传统传感器对巷道进行形变检测的方法相比,无需预置点位,具有更优的准确性、更强的时效性、更高的自动化程度。其次,本发明与其它基于时序变化的点云间距离度量的形变检测技术相比,利用小尺度分布对巷道表面进行表征,来适应于诸如巷道等复杂环境。再次,在本发明中,通过训练无监督孤立森林模型来对形变计算数据进行分析决策,不仅避免了人工处理测量数据时带入的主观因素,而且可以在扫描过程中实时地对形变位置进行感知。
33、本发明所采用的激光雷达设备等可以快速的进行加装、部署与维护,辅助操作员进行井下巡检,提高工作效率,大幅度降低改装的难度和成本。
34、综上,本发明基于激光点云的巷道形变检测技术,实现端到端地获取巷道中形变位置,大大简化了工作流程,提高了检测效率与精度,从而实现实时、精准巷道变形检测,为支护工作提供重要参考依据。
技术特征:
1.一种基于激光点云的巷道形变实时检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于激光点云的巷道形变实时检测方法,其特征在于,所述步骤1中,使用三维激光雷达对巷道周围点云信息进行采集,基于高精度建图算法,构建或更新巷道基础点云地图,所述高精度建图算法为slam算法或sfm算法。
3.根据权利要求1所述的一种基于激光点云的巷道形变实时检测方法,其特征在于,所述步骤2中,构建所述巷道基础点云地图与实时扫描帧之间的体素精关联,包括以下步骤:
4.根据权利要求3所述的一种基于激光点云的巷道形变实时检测方法,其特征在于,所述步骤2.1中,对实时扫描帧与巷道基础点云地图的对应位置构建体素粗关联的具体方法为:
5.根据权利要求3所述的一种基于激光点云的巷道形变实时检测方法,其特征在于,所述步骤2.2中,使用vgicp算法对体素粗关联后的实时扫描帧与巷道基础点云地图进行配准;
6.根据权利要求1所述的一种基于激光点云的巷道形变实时检测方法,其特征在于,步骤3中,采用体素间马氏距离作为体素间相似度,则计算所述巷道基础点云地图与实时扫描帧之间的体素间马氏距离的方法为:
7.根据权利要求1所述的一种基于激光点云的巷道形变实时检测方法,其特征在于,所述步骤4中,巷道形变数据分析决策模型的训练方法为:
8.一种基于激光点云的巷道形变实时检测装置,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,所述计算机程序被处理器进行加载,以执行权利要求1-7任一项所述的一种基于激光点云的巷道形变实时检测方法中的步骤。
技术总结
本发明公开了一种基于激光点云的巷道形变实时检测方法、装置及存储介质,涉及巷道形变检测技术领域。首先构建或更新巷道基础点云地图,并获取巡检过程中的实时扫描帧;依据所述巷道基础点云地图,对实时扫描帧进行重定位,构建两者之间的体素粗关联;基于所述体素粗关联,对实时扫描帧与巷道基础点云地图进行配准,根据配准结果对实时扫描帧与巷道基础点云地图的对应位置构建体素精关联;基于所述体素精关联,计算所述巷道基础点云地图与实时扫描帧之间的体素间相似度;将所述体素间相似度,输入巷道形变数据分析决策模型中,得到形变结果。本发明提高了检测效率与精度,从而实现实时、精准巷道变形检测,同时还降低了操作难度和成本。
技术研发人员:毕林,陈博勋,赵子瑜
受保护的技术使用者:中南大学
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!