一种基于物理约束的激光雷达边界层高度反演方法及系统
本发明属于大气探测,具体涉及一种基于物理约束的激光雷达边界层高度反演方法及系统。
背景技术:
1、大气边界层是大气中最接近地表的一部分,包括近地层、混合层和夹卷层,它在大气科学和应用中扮演着关键角色。大气边界层提供了关于污染物传输和扩散的重要信息,有助于改善空气质量和采取有效的污染控制措施。此外,边界层高度也影响着气象现象的演变,对天气预测和气象模型的准确性具有重要影响。因此,精确反演大气边界层高度对于研究天气变化和气候模式至关重要。
2、由于激光雷达可以提供高时间分辨率和高垂直分辨率的大气观测数据,已被广泛应用于边界层高度探测。激光雷达可以通过大气边界层内外气溶胶浓度的差异来反演大气边界层高度。传统的激光雷达边界层高度算法包括梯度法、曲线拟合法、小波变换法等。这些算法都是基于激光雷达系统的后向散射数据反映出的气溶胶浓度信息来反演大气边界层高度。例如,梯度法和曲线拟合法是通过寻找距离校正信号和激光雷达原始数据拟合出的曲线的最大梯度位置来反演大气边界层高度,小波变换是通过寻找小波变换后的信号的局部最大值来确定边界层高度。上述方法都依赖于气溶胶的垂直分布信息。当大气条件较为复杂或者背景噪声较为强烈时,会导致出现多个气溶胶垂直梯度,扰乱传统的激光雷达边界层高度算法对边界层高度的准确判断。因此,需要一种可靠的方法来克服由复杂大气条件和背景噪声产生的多个局部梯度对传统激光雷达边界层高度算法的影响。
技术实现思路
1、针对现有技术的不足,本发明提供一种基于物理约束的激光雷达边界层高度反演方法及系统,利用决策树算法将物理约束和气象参数进行融合查找边界层高度,用以改进在复杂大气条件下,多个局部梯度的存在导致传统激光雷达算法反演边界层高度不准确的问题。
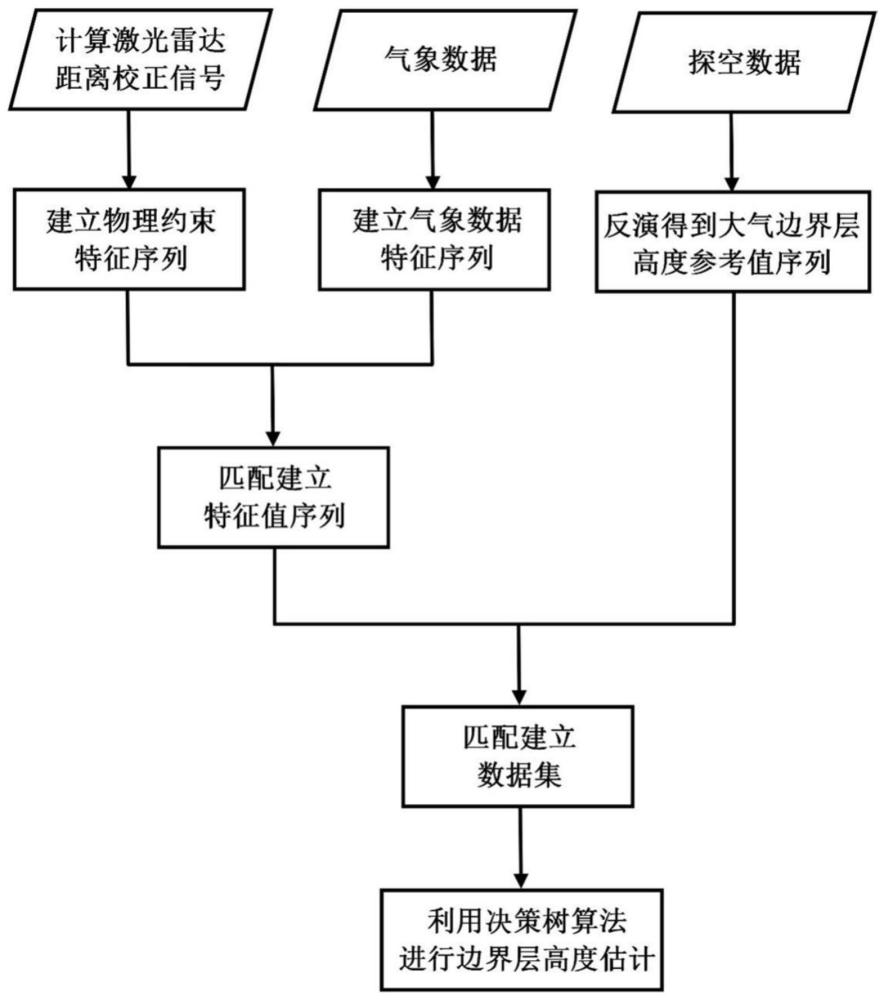
2、为了实现上述目的,本发明提供一种基于物理约束的激光雷达边界层高度反演方法,包括以下步骤:
3、步骤1,计算激光雷达的距离校正信号数据;
4、步骤2,利用距离校正信号梯度廓线上最小的三个局部峰值对应的高度建立物理约束特征序列;
5、步骤3,将探空数据反演出的大气边界层高度作为参考值序列,将物理约束特征序列与气象参数作为特征值序列,根据时间将参考值和特征值进行匹配,构建数据集;
6、步骤4,利用参考值与特征值构建决策树,通过决策树算法进行边界层高度估计。
7、而且,所述步骤1中通过将激光雷达信号两边乘以距离的平方得到距离校正信号。
8、而且,所述步骤2中物理约束特征序列的构建方法如下:
9、激光雷达距离校正信号梯度的局部峰值计算公式为:
10、gm=peaks(diff(rcs)) (1)
11、式中,gm表示梯度的局部峰值,rcs表示激光雷达的距离校正信号,diff()表示对信号求梯度,peaks()表示寻找局部峰值。
12、为了方便区分,将最小的三个局部峰值分别用gm1、gm2、gm3表示,并取距离校正信号梯度廓线最大局部峰值与最小局部峰值和的三分之一为动态阈值,若低于动态阈值的距离校正信号梯度廓线只有一个局部峰值,则gm1、gm2、gm3均为最小局部峰值;若低于动态阈值的距离校正信号梯度廓线局部峰值数量为二,则gm1、gm2为两个局部峰值中较小的那个局部峰值,gm3为另一局部峰值;若低于动态阈值的距离校正信号梯度廓线局部峰值数大于或等于三,则gm1、gm2、gm3分别为三个最小局部峰值。
13、而且,所述步骤3中将探空数据反演出的大气边界层高度作为参考值序列,将物理约束特征序列gm1、gm2、gm3与温度、湿度、风速、压强、太阳辐射、净辐射、土壤温度这些气象参数作为特征值序列,然后把参考值与特征值按时间对应,建立数据集。
14、而且,所述步骤4中使用十折交叉验证的方法验证决策树算法的准确性,将数据集分成10份,每1份轮流作为测试数据集,其它9份作为相应的训练数据集,每份测试数据集中的每组数据的特征值输入到构建的决策树中都会得到一个预测值,将其分别与每组数据的参考值进行对比,能够得到总的预测精度。利用参考值与特征值构建决策树,先从训练集数据中随机抽n1组数据并且从所有特征中随机抽n2个特征构建一棵决策树,然后有放回的重新随机抽取n1组数据和n2个特征再构建另一棵决策树,直到构建n棵决策树。每棵决策树的每个节点在进行分裂决策时,从随机抽样的n1组样本数据和n2个特征中找到最佳的分裂条件,这个过程重复进行,直到达到节点包含的样本数量小于设定的最小叶子节点数κ为止。在对边界层高度做预测时,将包含物理约束与气象条件的特征值作为输入样本传递给每棵决策树,每棵决策树都会生成一个回归预测值,总的回归预测结果p为所有回归决策树的回归预测值的平均值,即:
15、p=(p1+p2+...+pi...+pn)/n (2)
16、式中,n为决策树的棵数,pi表示每颗决策树生成的回归预测值,即预测的边界层高度。
17、本发明还提供一种基于物理约束的激光雷达边界层高度反演系统,用于实现如上所述的一种基于物理约束的激光雷达边界层高度反演方法。
18、而且,包括处理器和存储器,存储器用于存储程序指令,处理器用于调用存储器中的程序指令执行如上所述的一种基于物理约束的激光雷达边界层高度反演方法。
19、或者,包括可读存储介质,所述可读存储介质上存储有计算机程序,所述计算机程序执行时,实现如上所述的一种基于物理约束的激光雷达边界层高度反演方法。
20、与现有技术相比,本发明具有如下优点:
21、本发明综合考虑物理约束与大气参数,并利用决策树算法对当前的大气边界层高度进行估计,提高了边界层高度反演的精度和效率。本发明能够克服复杂大气条件和背景噪声的影响,做到在不同复杂大气条件下的精确反演,可广泛用于环境保护和天气预报等相关行业。
技术特征:
1.一种基于物理约束的激光雷达边界层高度反演方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种基于物理约束的激光雷达边界层高度反演方法,其特征在于:步骤2中物理约束特征序列的构建方法如下:
3.如权利要求1所述的一种基于物理约束的激光雷达边界层高度反演方法,其特征在于:步骤3中将探空数据反演出的大气边界层高度作为参考值序列,将物理约束特征序列与温度、湿度、风速、压强、太阳辐射、净辐射、土壤温度这些气象参数作为特征值序列,然后把参考值与特征值按时间对应,建立数据集。
4.如权利要求1所述的一种基于物理约束的激光雷达边界层高度反演方法,其特征在于:步骤4中使用十折交叉验证的方法测试决策树算法的准确性,将数据集分成10份,每1份轮流作为测试数据集,其它9份作为相应的训练数据集,每份测试数据集中的每组数据的特征值输入到构建的决策树中都会得到一个预测值,将其分别与每组数据中的参考值进行对比,能够得到总的预测精度。
5.如权利要求4所述的一种基于物理约束的激光雷达边界层高度反演方法,其特征在于:步骤4中利用参考值与特征值构建决策树,先从训练集数据中随机抽n1组数据并且从所有特征中随机抽n2个特征构建一棵决策树,然后有放回的重新随机抽取n1组数据和n2个特征再构建另一棵决策树,直到构建n棵决策树。
6.如权利要求5所述的一种基于物理约束的激光雷达边界层高度反演方法,其特征在于:步骤4中每棵决策树的每个节点在进行分裂决策时,从随机抽样的n1组样本数据和n2个特征中找到最佳的分裂条件,这个过程重复进行,直到达到节点包含的样本数量小于设定的最小叶子节点数κ为止;在对边界层高度做预测时,将包含物理约束与气象条件的特征值作为输入样本传递给每棵决策树,每棵决策树都会生成一个回归预测值,总的回归预测结果p为所有回归决策树的回归预测值的平均值,即:
7.一种基于物理约束的激光雷达边界层高度反演系统,其特征在于,包括处理器和存储器,存储器用于存储程序指令,处理器用于调用存储器中的程序指令执行如权利要求1-6任一项所述的一种基于物理约束的激光雷达边界层高度反演方法。
8.一种基于物理约束的激光雷达边界层高度反演系统,其特征在于,包括可读存储介质,所述可读存储介质上存储有计算机程序,所述计算机程序执行时,实现如权利要求1-6任一项所述的一种基于物理约束的激光雷达边界层高度反演方法。
技术总结
本发明公开了一种基于物理约束的激光雷达边界层高度反演方法及系统,通过将物理约束与大气参数相结合,利用决策树法对当前的大气边界层高度进行估计,从而准确获得边界层高度。相较于传统的梯度法,本发明具有执行简单、准确度高和适用性广泛的特点,能够克服复杂大气条件和背景噪声对边界层高度精确查找的影响,有效地提高激光雷达数据反演大气边界层高度的精度。
技术研发人员:刘博铭,李辉,龚威
受保护的技术使用者:武汉大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!