车辆碰撞测试假人位移测量方法、装置、设备及存储介质与流程
本发明涉及车辆测试,尤其涉及一种车辆碰撞测试假人位移测量方法、装置、设备及存储介质。
背景技术:
1、整车碰撞测试过程中,乘员相对于车体的位移量,是影响伤害值的重要因素,是指导汽车被动安全性能的重要指标。目前的手段是通过车载相机拍摄的录像,进行粗略的分析,此方法存在以下缺点:计算物体运动位移的过程中,环境因素如光照、背景等都会对结果产生影响,导致精度下降;如果物体的运动状态比较复杂,如弯曲运动或旋转运动等,或是运动过程中被遮挡,这种方法将会变得更加困难;由于该方法是基于视频帧之间的差异来计算位移的,因此存在误差积累的问题,尤其是在较长时间的运动过程中;对于柔软、形状不规则、表面光滑的物体,本方法无法提供准确的位移计算结果,目前通过录像测量假人运动位移的方法局限性较大,且测量的精度不高。
2、上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现思路
1、本发明的主要目的在于提供一种车辆碰撞测试假人位移测量方法、装置、设备及存储介质,旨在解决现有技术通过录像测量假人运动位移的方法局限性较大,且测量的精度不高的技术问题。
2、为实现上述目的,本发明提供了一种车辆碰撞测试假人位移测量方法,所述车辆碰撞测试假人位移测量方法包括以下步骤:
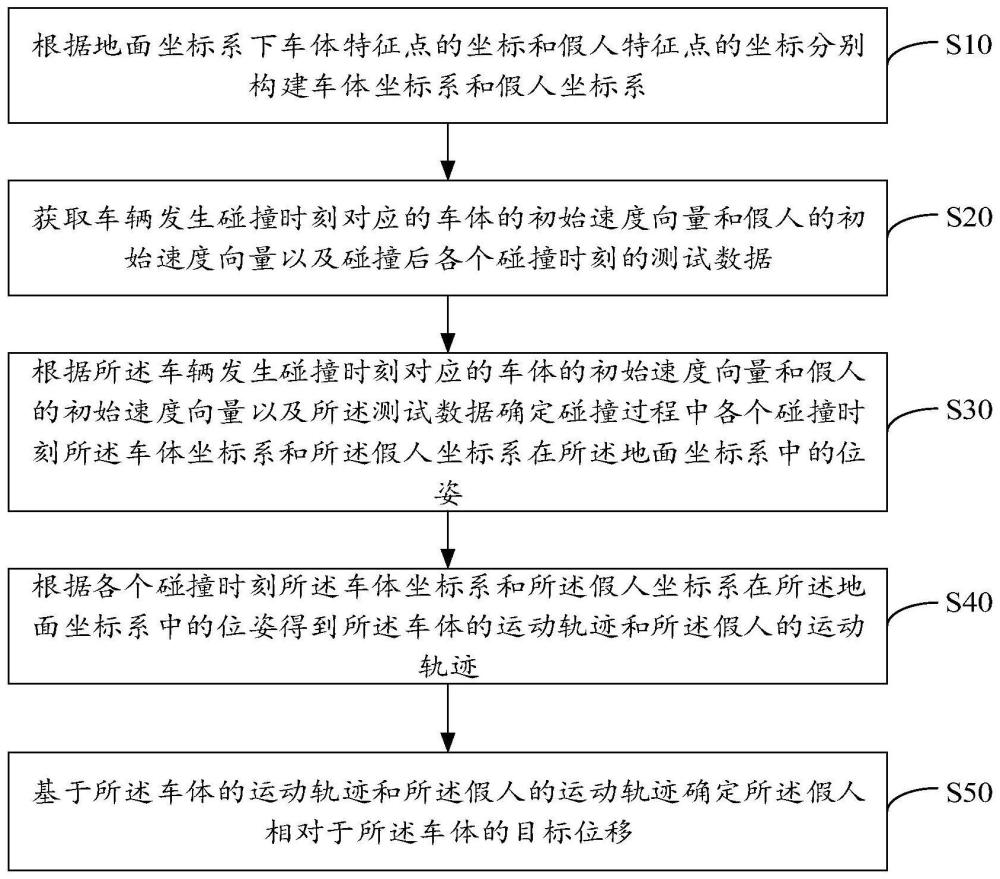
3、根据地面坐标系下车体特征点的坐标和假人特征点的坐标分别构建车体坐标系和假人坐标系;
4、获取车辆发生碰撞时刻对应的车体的初始速度向量和假人的初始速度向量以及碰撞后各个碰撞时刻的测试数据;
5、根据所述车辆发生碰撞时刻对应的车体的初始速度向量和假人的初始速度向量以及所述测试数据确定碰撞过程中各个碰撞时刻所述车体坐标系和所述假人坐标系在所述地面坐标系中的位姿;
6、根据各个碰撞时刻所述车体坐标系和所述假人坐标系在所述地面坐标系中的位姿得到所述车体的运动轨迹和所述假人的运动轨迹;
7、基于所述车体的运动轨迹和所述假人的运动轨迹确定所述假人相对于所述车体的目标位移。
8、可选地,所述车辆发生碰撞时刻对应的车体的初始速度向量和假人的初始速度向量均以所述地面坐标系为基准,所述根据所述车辆发生碰撞时刻对应的车体的初始速度向量和假人的初始速度向量以及所述测试数据确定碰撞过程中各个碰撞时刻所述车体坐标系和所述假人坐标系在所述地面坐标系中的位姿,包括:
9、根据所述测试数据确定任一碰撞时刻对应的车体的速度向量和假人的速度向量,所述任一碰撞时刻对应的车体的速度向量和假人的速度向量均以所述地面坐标系为基准;
10、根据所述车辆发生碰撞时刻对应的车体的初始速度向量和假人的初始速度向量,以及所述任一碰撞时刻对应的车体的速度向量和假人的速度向量分别得到所述任一碰撞时刻所述车体坐标系和所述假人坐标系在所述地面坐标系中的位姿。
11、可选地,所述根据所述测试数据确定任一碰撞时刻对应的车体的速度向量和假人的速度向量,包括:
12、根据所述测试数据获取任一碰撞时刻对应的车体的加速度值和假人的加速度值,所述任一碰撞时刻所述车体坐标系与所述地面坐标系的三个坐标轴之间的旋转角度,以及所述任一碰撞时刻所述假人坐标系与所述地面坐标系的三个坐标轴之间的旋转角度;
13、根据所述车体的加速度值和所述任一碰撞时刻所述车体坐标系与所述地面坐标系的三个坐标轴之间的旋转角度确定任一碰撞时刻对应的车体的速度向量,以及根据所述假人的加速度值和所述任一碰撞时刻所述假人坐标系与所述地面坐标系的三个坐标轴之间的旋转角度确定任一碰撞时刻对应的假人的速度向量。
14、可选地,所述根据所述车体的加速度值和所述任一碰撞时刻所述车体坐标系与所述地面坐标系的三个坐标轴之间的旋转角度确定任一碰撞时刻对应的车体的速度向量,以及根据所述假人的加速度值和所述任一碰撞时刻所述假人坐标系与所述地面坐标系的三个坐标轴之间的旋转角度确定任一碰撞时刻对应的假人的速度向量,包括:
15、以所述任一碰撞时刻所述车体坐标系与所述地面坐标系的三个坐标轴之间的旋转角度为基准构建第一参考旋转轴,并根据所述任一碰撞时刻所述车体坐标系与所述地面坐标系的三个坐标轴之间的旋转角度计算第一目标旋转角度,所述第一目标旋转角度表示所述车体坐标系绕所述第一参考旋转轴旋转所需要的旋转角度;
16、根据所述第一目标旋转角度和所述车体的加速度值确定所述任一碰撞时刻所述车体的加速度向量,并根据所述车体的加速度向量确定所述任一碰撞时刻对应的车体的速度向量;
17、以所述任一碰撞时刻所述假人坐标系与所述地面坐标系的三个坐标轴之间的旋转角度为基准构建第二参考旋转轴,并根据所述任一碰撞时刻所述假人坐标系与所述地面坐标系的三个坐标轴之间的旋转角度计算第二目标旋转角度,所述第二目标旋转角度表示所述假人坐标系绕所述第二参考旋转轴旋转所需要的旋转角度;
18、根据所述第二目标旋转角度和所述假人的加速度值确定所述任一碰撞时刻所述假人的加速度向量,并根据所述假人的加速度向量确定所述任一碰撞时刻对应的假人的速度向量。
19、可选地,所述根据所述车辆发生碰撞时刻对应的车体的初始速度向量和假人的初始速度向量,以及所述任一碰撞时刻对应的车体的速度向量和假人的速度向量分别得到所述任一碰撞时刻所述车体坐标系和所述假人坐标系在所述地面坐标系中的位姿,包括:
20、确定车辆发生碰撞的时刻;
21、根据所述车辆发生碰撞的时刻、所述任一碰撞时刻、所述车辆发生碰撞时刻对应的车体的初始速度向量以及所述任一碰撞时刻对应的车体的速度向量计算所述车体坐标系的位移量,以及根据所述车辆发生碰撞的时刻、所述任一碰撞时刻所述车辆发生碰撞时刻对应的假人的初始速度向量以及所述任一碰撞时刻对应的假人的速度向量计算所述假人坐标系的位移量;
22、根据所述车体坐标系的位移量和所述假人坐标系的位移量分别确定所述任一碰撞时刻所述车体坐标系和所述假人坐标系在所述地面坐标系中的位姿。
23、可选地,所述根据各个碰撞时刻所述车体坐标系和所述假人坐标系在所述地面坐标系中的位姿得到所述车体的运动轨迹和所述假人的运动轨迹,包括:
24、根据各个碰撞时刻所述车体坐标系和所述假人坐标系在所述地面坐标系中的位姿确定各个碰撞时刻所述车体坐标系的原点在所述地面坐标系中的相对位置以及所述假人坐标系的原点在所述地面坐标系中的相对位置;
25、结合车辆发生碰撞时刻所述车体坐标系的原点位置与所述各个碰撞时刻所述车体坐标系的原点在所述地面坐标系中的相对位置得到所述车体的运动轨迹,以及结合车辆发生碰撞时刻所述假人坐标系的原点位置与所述各个碰撞时刻所述假人坐标系的原点在所述地面坐标系中的相对位置得到所述假人的运动轨迹。
26、可选地,所述基于所述车体的运动轨迹和所述假人的运动轨迹确定所述假人相对于所述车体的目标位移,包括:
27、基于所述车体的运动轨迹和所述假人的运动轨迹确定各个碰撞时刻所述车体与所述假人之间的相对位移;
28、将所述相对位移中最大的相对位移作为目标位移。
29、此外,为实现上述目的,本发明还提出一种车辆碰撞测试假人位移测量装置,所述车辆碰撞测试假人位移测量装置包括:
30、构建模块,用于根据地面坐标系下车体特征点的坐标和假人特征点的坐标分别构建车体坐标系和假人坐标系;
31、获取模块,用于获取车辆发生碰撞时刻对应的车体的初始速度向量和假人的初始速度向量以及碰撞后各个碰撞时刻的测试数据;
32、处理模块,用于根据所述车辆发生碰撞时刻对应的车体的初始速度向量和假人的初始速度向量以及所述测试数据确定碰撞过程中各个碰撞时刻所述车体坐标系和所述假人坐标系在所述地面坐标系中的位姿;
33、所述处理模块,还用于根据各个碰撞时刻所述车体坐标系和所述假人坐标系在所述地面坐标系中的位姿得到所述车体的运动轨迹和所述假人的运动轨迹;
34、所述处理模块,还用于基于所述车体的运动轨迹和所述假人的运动轨迹确定所述假人相对于所述车体的目标位移。
35、此外,为实现上述目的,本发明还提出一种车辆碰撞测试假人位移测量设备,所述车辆碰撞测试假人位移测量设备包括:存储器、处理器及存储在所述存储器上并在所述处理器上运行的车辆碰撞测试假人位移测量程序,所述车辆碰撞测试假人位移测量程序配置为实现如上文所述的车辆碰撞测试假人位移测量方法。
36、此外,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有车辆碰撞测试假人位移测量程序,所述车辆碰撞测试假人位移测量程序被处理器执行时实现如上文所述的车辆碰撞测试假人位移测量方法。
37、本发明根据地面坐标系下车体特征点的坐标和假人特征点的坐标分别构建车体坐标系和假人坐标系;获取车辆发生碰撞时刻对应的车体的初始速度向量和假人的初始速度向量以及碰撞后各个碰撞时刻的测试数据;根据所述车辆发生碰撞时刻对应的车体的初始速度向量和假人的初始速度向量以及所述测试数据确定碰撞过程中各个碰撞时刻所述车体坐标系和所述假人坐标系在所述地面坐标系中的位姿;根据各个碰撞时刻所述车体坐标系和所述假人坐标系在所述地面坐标系中的位姿得到所述车体的运动轨迹和所述假人的运动轨迹;基于所述车体的运动轨迹和所述假人的运动轨迹确定所述假人相对于所述车体的目标位移,利用惯性导航算法求解出车体、假人在空间中的运动轨迹,然后通过坐标变换,将假人运动轨迹转换到车体坐标系下,得到假人相对于车体的位移,上述方式能够适用于复杂的运动和环境,提升了测量的精度。
- 还没有人留言评论。精彩留言会获得点赞!