一种基于深度学习的电池壳表面缺陷检测方法及系统与流程
本发明属于电池壳检测,具体是指一种基于深度学习的电池壳表面缺陷检测方法及系统。
背景技术:
1、电池壳表面缺陷检测是指对电池壳外表面进行检测,以发现和识别可能存在的缺陷和损伤。但是现有的特征选择方法存在受噪声和冗余特征的影响导致准确性低的问题;传统的神经网络模型存在过拟合和损失函数的不平衡的问题;当前的参数搜索算法存在位置更新方法简单导致算法陷入局部最优解,无法找到全局最优解,且计算复杂度高的问题。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本发明提供了一种基于深度学习的电池壳表面缺陷检测方法及系统,针对现有的特征选择方法存在受噪声和冗余特征的影响导致准确性低的问题,本方案基于皮尔逊相关系数、互信息和加权求和的方法计算相关性值,并将稳定性值和相关性值相结合进行特征选择,提高了特征选择的准确性和可靠性;针对传统的神经网络模型存在过拟合和损失函数的不平衡的问题,本方案基于负样本处理和调整参数优化损失函数,使损失函数更加全面地反映模型的性能,减少模型在训练数据上的过拟合问题,并增强模型的鲁棒性;针对当前的参数搜索算法存在位置更新方法简单导致算法陷入局部最优解,无法找到全局最优解,且计算复杂度高的问题,本方案基于logistic映射初始化个体位置和基于余弦策略计算能量,扩大搜索范围,并采用柯西突变策略、logistic映射和精英个人引导机制优化位置更新策略,有效防止算法陷入局部最优解,以协调算法的局部发展和全局搜索能力,增强搜索效率和准确性。
2、本发明采取的技术方案如下:本发明提供的一种基于深度学习的电池壳表面缺陷检测方法,该方法包括以下步骤:
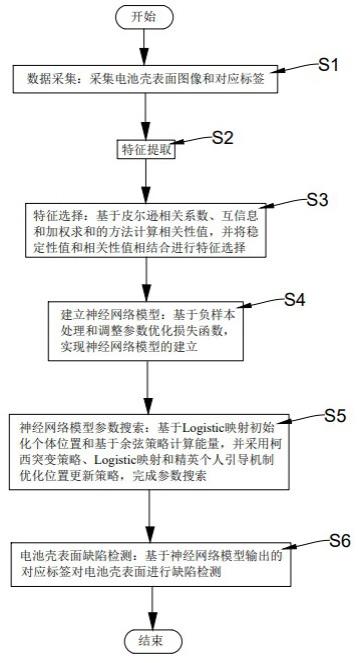
3、步骤s1:数据采集,采集电池壳表面图像和对应标签;
4、步骤s2:特征提取;
5、步骤s3:特征选择,基于皮尔逊相关系数、互信息和加权求和的方法计算相关性值,并将稳定性值和相关性值相结合进行特征选择;
6、步骤s4:建立神经网络模型,基于负样本处理和调整参数优化损失函数,实现神经网络模型的建立;
7、步骤s5:神经网络模型参数搜索,基于logistic映射初始化个体位置和基于余弦策略计算能量,并采用柯西突变策略、logistic映射和精英个人引导机制优化位置更新策略,完成参数搜索;
8、步骤s6:电池壳表面缺陷检测,基于神经网络模型输出的对应标签对电池壳表面进行缺陷检测。
9、进一步地,在步骤s1中,所述数据采集是采集电池壳表面图像和对应标签,对应标签包括电池壳表面缺陷类型和无缺陷。
10、进一步地,在步骤s2中,所述特征提取是从采集的数据中提取特征,形成原始特征数据集ys。
11、进一步地,在步骤s3中,所述特征选择具体包括以下步骤:
12、步骤s31:初始化,预先设定稳定性阈值δ、第一相关性值阈值εb、第二相关性值阈值εc、相关性阈值ε、第一相关性值权重ζb和第二相关性值权重ζc;
13、步骤s32:计算特征的稳定性值,所用公式如下:
14、;
15、式中,a是特征的稳定性值,g是特征,i是特征索引,mode(gi)是特征gi中最频繁出现的非缺失值的元组数量,ni是特征gi中非缺失值的元组总数,n1是原始特征数据集ys中的特征数量;
16、步骤s33:计算第一相关性值,将采集的对应标签作为分类标签,基于皮尔逊相关系数计算特征和分类标签之间的第一相关性值,所用公式如下:
17、;
18、式中,bij是第i个特征和第j个分类标签之间的第一相关性值,f是分类标签的值,j是分类标签索引,是特征gi中所有非缺失值的平均值,是分类标签fj的平均值,n2是分类标签的数量;
19、步骤s34:计算第二相关性值,基于互信息计算特征和分类标签之间的第二相关性值,所用公式如下:
20、;
21、式中,cij是第i个特征和第j个分类标签之间的第二相关性值,h(gi)是特征gi的信息熵,h(fj)是分类标签fj的信息熵,h(gi,fj)是特征gi和分类标签fj的联合熵;
22、步骤s35:构建中间特征数据集,将稳定性值小于稳定性阈值δ或稳定性值大于等于稳定性阈值δ且第一相关性值大于等于第一相关性阈值εb且第二相关性值大于等于第二相关性阈值εc的特征添加到中间特征数据集zs中;
23、步骤s36:计算相关性值,基于第一相关性值和第二相关性值采用加权求和的方法计算中间特征数据集中特征的相关性值,所用公式如下:
24、;
25、式中,eij是第i个特征和第j个分类标签之间的相关性值;
26、步骤s37:构建最终特征数据集,将相关性值大于等于相关性阈值ε的特征添加到最终特征数据集ts中。
27、进一步地,在步骤s4中,所述建立神经网络模型具体包括以下步骤:
28、步骤s41:初始化神经网络模型,预先设定神经网络模型的层数l和神经元数量;
29、步骤s42:定义损失函数,引入负样本处理和调整参数优化损失函数,所用公式如下:
30、;
31、式中,loss(w,σ)是损失函数,σ是是网络中的偏置项参数,w是网络中的权重参数,bc是真实标签,是预测标签,是打乱的标签,n4是使用的样本中不正确标签对的数量,c是使用的样本中不正确标签对的索引,ce()是交叉熵损失函数,θ和是调整参数。
32、进一步地,在步骤s5中,所述神经网络模型参数搜索将神经网络模型的权重w和偏置项σ作为搜索维度,具体包括以下步骤:
33、步骤s51:初始化,预先设定个体总数量n5、最大迭代次数t、个体维度r、分支参数β、适应度阈值εo、levy常数q、神经网络模型的权重w和偏置项σ的搜索空间范围,搜索空间的下边界为lb,搜索空间的上边界为ub,用权重w和偏置项σ代表个体的位置;
34、步骤s52:初始化个体位置,采用logistic映射初始化个体位置,所用公式如下:
35、da+1=βda(1-da),a=1,2,…,n5-1;
36、式中,d1是0到1之间的随机数,d是个体位置,a是个体索引;
37、步骤s53:计算最优适应度值和全局最优位置,将基于个体位置的神经网络模型正确率作为对应适应度值m,选择最高的适应度值作为最优适应度值,并将其对应的个体位置作为全局最优位置dbest;
38、步骤s54:计算能量和步长,基于余弦策略计算能量,所用公式如下:
39、;
40、q=2×(1-rand(0,1));
41、式中,p是能量,q是步长,t是当前迭代次数,cos()是余弦函数,rand()是随机数生成函数;
42、步骤s55:位置更新,若|p|≥1,则转至步骤s551,进入探索阶段;否则,则转至步骤s552,进入局部开采阶段;最后使用精英个人引导机制优化个体位置,步骤如下:
43、步骤s551:探索阶段,为每个个体随机生成一个(0,1)之间的随机数η,基于η进行探索阶段的位置更新,并采用柯西突变策略对探索阶段位置更新后的全局最优位置进行优化,所用公式如下:
44、;
45、;
46、;
47、式中,da(t+1)是探索阶段位置更新后的第a个个体位置,dm是当前个体的平均位置,drand是当前个体中的随机位置,r1、r2、r3和r4是(0,1)之间的随机数,cauchy(0,1)是标准柯西分布函数,dbest(t+1)是探索阶段位置更新后的全局最优位置,是采用柯西突变策略优化后的全局最优位置;
48、步骤s552:局部开采阶段,为每个个体随机生成一个(0,1)之间的随机数γ,若γ≥0.5且|p|≥0.5,则转至步骤s5521,选择第一种位置更新方法进行位置更新;若γ≥0.5且|p|<0.5,则转至步骤s5522,选择第二种位置更新方法进行位置更新;若γ<0.5且|p|≥0.5,则转至步骤s5523,选择第三种位置更新方法进行位置更新;若γ<0.5且|p|<0.5,则转至步骤s5524,选择第四种位置更新方法进行位置更新;最后采用logistic映射对位置更新后的全局最优位置进行优化,步骤如下:
49、步骤s5521:第一种位置更新方法,所用公式如下:
50、△da(t)=dbest(t)-da(t);
51、da1(t+1)=△da(t)-p×|q×dbest(t)-da(t)|;
52、式中,△da(t)是全局最优位置与第a个个体位置的差值,da1(t+1)是按照第一种位置更新方法更新后的第a个个体位置;
53、步骤s5522:第二种位置更新方法,所用公式如下:
54、da2(t+1)=dbest(t)-p×|△da(t)|;
55、式中,da2(t+1)是按照第二种位置更新方法更新后的第a个个体位置;
56、步骤s5523:第三种位置更新方法,所用公式如下:
57、;
58、;
59、yw=dbest(t)-p×|q×dbest(t)-da(t)|;
60、zw=yw+u×lf(r);
61、;
62、式中,是按照第三种位置更新方法更新后的第a个个体位置,ψ是levy参数,γ是gamma函数,lf是levy飞行函数,r5和r6是(0,1)之间的随机数,u是一个r维的向量,yw和zw是第三种位置更新方法的两种位置更新策略;
63、步骤s5524:第四种位置更新方法,所用公式如下:
64、xg=dbest(t)-p×|q×dbest(t)-dm(t)|;
65、hg=xg+p×lf(r);
66、;
67、式中,xg和hg是第四种位置更新方法的两种位置更新策略,是按照第四种位置更新方法更新后的第a个个体位置;
68、步骤s5525:优化全局最优位置,采用logistic映射对位置更新后的全局最优位置进行优化,所用公式如下:
69、;
70、式中,是采用logistic映射优化后的全局最优位置,k是混沌搜索计数器的数目,是logistic映射生成的混沌序列值;
71、步骤s553:优化个体位置,从当前个体中选择前三个适应度值最低的个体位置dξ1、dξ2和dξ3,基于dξ1、dξ2和dξ3生成新的个体位置,使用精英个人引导机制优化个体位置,所用公式如下:
72、j=2×v×r7-v;
73、;
74、;
75、式中,是生成的第a个个体新位置,是使用精英个人引导机制优化后的第a个个体位置,v是在迭代过程中从2线性下降到0的变量,r7是(0,1)之间的随机数,j是更新参数;
76、步骤s56:更新最优适应度值和全局最优位置;
77、步骤s57:参数确定,当最优适应度值高于适应度阈值εo,则基于当前权重w和偏置项σ建立神经网络模型;若达到最大迭代次数t,则转至步骤s52进行搜索;否则转至步骤s54进行迭代搜索。
78、进一步地,在步骤s6中,所述电池壳表面缺陷检测是实时采集电池壳表面图像数据,输入至神经网络模型中,基于神经网络模型输出的对应标签对电池壳表面进行缺陷检测。
79、本发明提供的一种基于深度学习的电池壳表面缺陷检测系统,包括数据采集模块、特征提取模块、特征选择模块、建立神经网络模型模块、神经网络模型参数搜索模块和电池壳表面缺陷检测模块;
80、所述数据采集模块采集电池壳表面图像和对应标签,对应标签包括电池壳表面缺陷类型和无缺陷,并将采集的数据发送到特征提取模块;
81、所述特征提取模块从采集的数据中提取特征,形成原始特征数据集,并将原始特征数据集发送至特征选择模块;
82、所述特征选择模块基于皮尔逊相关系数、互信息和加权求和的方法计算相关性值,并将稳定性值和相关性值相结合进行特征选择,形成最终特征数据集,并将最终特征数据集发送至建立神经网络模型模块;
83、所述建立神经网络模型模块基于负样本处理和调整参数优化损失函数,实现神经网络模型的建立,并将数据发送至电池壳表面缺陷检测模块;
84、所述神经网络模型参数搜索模块基于logistic映射初始化个体位置和基于余弦策略计算能量,并采用柯西突变策略、logistic映射和精英个人引导机制优化位置更新策略,完成参数搜索,并将数据发送至建立神经网络模型模块;
85、所述电池壳表面缺陷检测模块实时采集电池壳表面图像数据,输入至神经网络模型中,基于神经网络模型输出的对应标签对电池壳表面进行缺陷检测。
86、采用上述方案本发明取得的有益效果如下:
87、(1)针对现有的特征选择方法存在受噪声和冗余特征的影响导致准确性低的问题,本方案基于皮尔逊相关系数、互信息和加权求和的方法计算相关性值,并将稳定性值和相关性值相结合进行特征选择,提高了特征选择的准确性和可靠性。
88、(2)针对传统的神经网络模型存在过拟合和损失函数的不平衡的问题,本方案基于负样本处理和调整参数优化损失函数,使损失函数更加全面地反映模型的性能,减少模型在训练数据上的过拟合问题,并增强模型的鲁棒性。
89、(3)针对当前的参数搜索算法存在位置更新方法简单导致算法陷入局部最优解,无法找到全局最优解,且计算复杂度高的问题,本方案基于logistic映射初始化个体位置和基于余弦策略计算能量,扩大搜索范围,并采用柯西突变策略、logistic映射和精英个人引导机制优化位置更新策略,有效防止算法陷入局部最优解,以协调算法的局部发展和全局搜索能力,增强搜索效率和准确性。
- 还没有人留言评论。精彩留言会获得点赞!