一种无人机声事件检测定位装置
本发明涉及无人机检测,尤其涉及一种无人机声事件检测定位装置。
背景技术:
1、随着科学技术水平逐步提升,无人机技术逐渐渗透进我们的生活与工作中,尤其是旋翼飞行器有着举足轻重的作用,但一些无人值守或需要保护隐私的重要区域需要一种针对无人机的有效且安全的探测手段和探测设备。目前技术中,存在众多的无人机探测定位设备,目前针对无人机的探测手段主要有不便于移动的雷达探测、射频探测、视觉探测。雷达探测是一种常用的目标探测手段,但雷达探测属于主动探测,发射的电磁信号会被敌方发现,从而暴露自身位置信息。射频探测方法在遇到自主无人机按照预定的gps路径运动而不需要控制时,会导致该方法无法发挥作用,且所需的基础设施昂贵。视觉探测方法是利用摄像头拍摄的图像进行探测且不会暴露自身的探测手段,但当环境能见度较低或无人机散发的热量较少而鸟类散发的热量较多或无人机被障碍物遮挡时,无法分辨是鸟类还是无人机,因此视觉探测手段只能作为辅助手段与其他探测方法配合使用,而不是单独探测。声探测方法是一种被动探测手段,该方法不会暴露自身的位置信息,属于“隐身探测”,其探测装置体积小、便于携带,可以以较低成本实现全天候工作等优点,近年来声探测技术逐渐得到了广泛的应用。利用声探测技术探测无人机就是利用分类器对采集到的无人机声音信号进行分类,从而判断是否存在无人机。
2、但是由于使用单麦克风进行无人机声事件检测,所能探测无人机的范围有限。因此,现有技术中暂无利用麦克风阵列声音信号处理来探测无人机的装置。
3、为此,针对上述的技术问题还需进一步解决。
技术实现思路
1、本发明实施例的目的是提供一种无人机声事件检测定位装置,以实现使用声音获取组件进行无人机声事件检测,扩大了探测无人机的范围,从而获得通过声音获取组件对声音信号处理来探测无人机的装置。
2、为解决上述技术问题,本发明实施例提供如下技术方案:
3、本发明第一方面提供一种无人机声事件检测定位装置,包括:
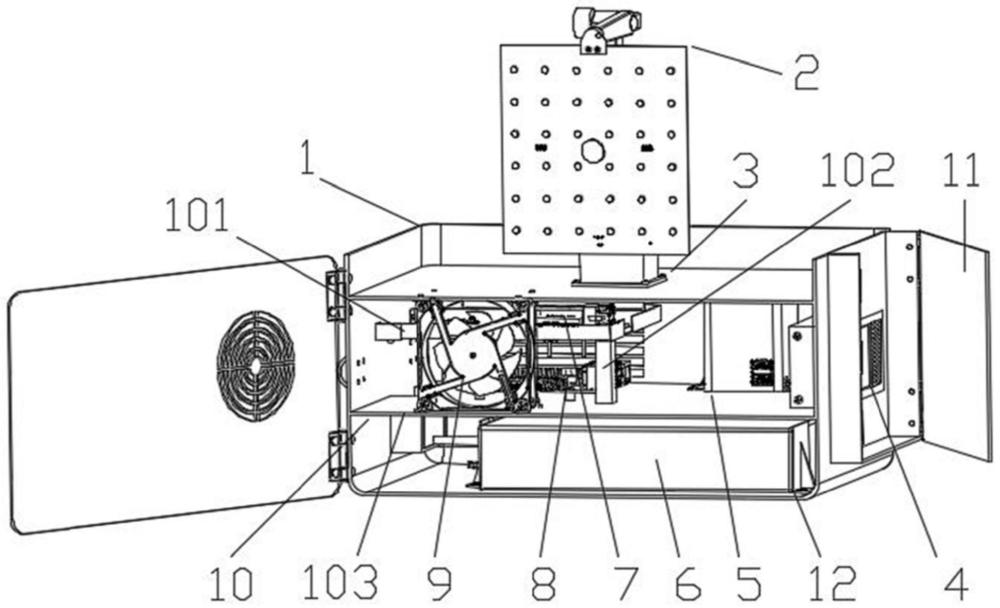
4、箱体,所述箱体的内部设置有固定架;
5、旋转组件,设置在所述箱体的外侧顶部,并且与所述箱体相连接;
6、声音获取组件,设置在所述箱体的外侧顶部,并且与所述旋转组件相连接;
7、第一控制板,设置在所述固定架上,并且与所述声音获取组件电性连接;
8、姿态测量设备,设置在所述固定架上,并且获取所述箱体的姿态数据信息;
9、排风件,设置在所述固定架上;
10、显示器,设置在所述箱体的外侧壁上;
11、第二控制板,设置在固定架上,并且分别与所述旋转组件、所述第一控制板、所述姿态测量设备、所述排风件和所述显示器电性连接;
12、电池,设置在所述箱体内,并且通过拓展坞分别与所述第一控制板、所述姿态测量设备、所述显示器和所述第二控制板进行电性连接。
13、进一步地,所述声音获取组件包括:
14、阵列板;
15、麦克风,均匀设置在所述阵列板上;
16、摄像头,设置在所述阵列板的中心处,并且与各所述麦克风设置在同一侧;
17、连接孔,设置在所述阵列板上,并且与所述旋转组件通过螺杆相连接。
18、进一步地,所述旋转组件包括:
19、第一旋转组,设置在所述箱体的外侧顶部;
20、第二旋转组,与所述第一旋转组相连接,并且在所述第一旋转组上进行水平旋转;
21、第三旋转组,与所述第二旋转组相连接;
22、第四旋转组,与所述第三旋转组相连接。
23、进一步地,所述第一旋转组包括:
24、第一连接件,与所述箱体的外侧顶部相连接;
25、第一电机,设置在所述第一连接件上,并且与所述第一连接件相连接,同时与所述第二控制板电性连接;
26、第一支撑架,与所述第一连接件相连接,并且位于所述第一电机的外部;
27、第一通孔,设置在所述第一支撑架上,并且供所述第一电机的输出轴穿出。
28、进一步地,所述第二旋转组包括:
29、第二连接件,设置在所述第一支撑架的顶部,并且与所述第一电机的输出轴相连接,所述第二连接件通过所述第一电机在所述第一支撑架的顶部水平旋转;
30、第三连接件,垂直设置在所述第二连接件上;
31、第二电机,设置在所述第三连接件上,同时与所述第二控制板电性连接;
32、第二通孔,设置在所述第三连接件上,并且供所述第二电机的输出轴穿出;
33、第一直臂,以所述第三连接件为中心设置在所述第二电机对侧的第二连接件上,并且与所述第二电机的输出轴相连接,所述第一直臂通过所述第二电机在所述第二连接件上摆动。
34、进一步地,所述第三旋转组包括:
35、第二直臂,位于远离所述第二连接件侧的所述第一直臂的端部处;
36、第三通孔,设置在远离所述第二连接件侧的所述第一直臂的端部;
37、第三电机,与所述第二控制板电性连接,并且以所述第二直臂为中心设置在所述第二直臂的对侧,所述第三电机的输出轴穿过所述第三通孔与所述第二直臂相连接,所述第二直臂通过所述第三电机在远离所述第二连接件侧的所述第一直臂的端部处摆动。
38、进一步地,所述第四旋转组包括:
39、第四电机,设置在靠近所述第三电机侧的所述第二直臂的端部处,同时与所述第二控制板电性连接;
40、第四通孔,设置在靠近所述第四电机处的所述第二直臂的端部,并且供所述第四电机的输出轴穿过;
41、第一转轴,设置在所述第二直臂的内部,并且与所述第四电机的输出轴相连接;
42、第五通孔,设置在远离所述第四电机侧的所述第二直臂的端部,并且供所述第一转轴穿过;
43、第四连接件,设置在靠近所述第五通孔处的所述第二直臂的端部,并且与远离所述第四电机侧的所述第一转轴的端部相连接,所述第四电机通过第一转轴带动所述第四连接件旋转。
44、进一步地,所述姿态测量设备包括:
45、设备壳,与所述固定架相连接;
46、测量仪,设置在所述设备壳的内部;
47、第一电源线接口,设置在所述设备壳上,并且通过第一电源线与所述拓展坞的第三usb接口相连接;
48、第一usb接口,设置在所述设备壳上,并且通过第二数据线与所述第二控制板相连接;
49、第二usb接口,设置在靠近所述第一usb接口处的所述设备壳上,并且通过第三数据线与所述第二控制板相连接。
50、进一步地,所述固定架包括:
51、第一支架,与所述箱体的内侧壁水平连接;
52、第二支架,与所述第一支架垂直连接;
53、第三支架,与远离所述第一支架侧的所述第二支架的端部水平连接;
54、其中,所述第三支架的面积大于所述第一支架的面积,并且所述设备壳的顶部与所述箱体的内侧顶壁相连接,所述设备壳的底部与所述第三支架相连接;
55、所述电池位于所述第三支架与所述箱体的底壁之间,所述电池上设置有对电池进行固定的定位架。
56、进一步地,所述定位架包括:
57、第四支架,与所述电池的侧壁相卡接;
58、第五支架,与所述第四支架垂直连接;
59、第六通孔,设置在所述第四支架上;
60、第一卡接缝隙,设置在所述第四支架上;
61、卡件,与所述电池相连接;
62、卡钩,设置在所述卡件上,并且与所述第一卡接缝隙相卡接;
63、助推件,设置在靠近所述卡钩处的所述卡件上;
64、第一卡销,与所述第六通孔相插接,并且在靠近所述电池侧的第一卡销的端部与所述助推件相接触;
65、第一弹簧,设置在所述第四支架与远离所述助推件侧的所述第一卡销的端部之间所述第一卡销的外周;
66、第一加强筋,同时与所述第四支架和所述第五支架相连接。
67、相较于现有技术,本发明第一方面提供的无人机声事件检测定位装置,电池在箱体内通过拓展坞分别对第一控制板、姿态测量设备、显示器和第二控制板供电,第二控制板控制旋转组件旋转至目标方向,带动与旋转组件相连接的声音获取组件朝向目标方向,第一控制板在位于箱体内的固定架上控制声音获取组件获取无人机的声音信号,并将该声音信号传输至第二控制板进行分析处理后,由第二控制板传输至位于箱体上的显示器上进行显示,以及通过显示器调节关于声音获取组件的目标参数后由第二控制板进行控制并使声音获取组件执行,姿态测量设备获取箱体的姿态数据信息并且将该姿态数据信息反馈至第二控制板,排风件对箱体内的热量进行吹散并排出。因此,实现了使用声音获取组件进行无人机声事件检测,扩大了探测无人机的范围,从而获得了通过声音获取组件对声音信号处理来探测无人机的装置。
- 还没有人留言评论。精彩留言会获得点赞!