一种测斜探头卡阻突破方法及测斜装置与流程
本发明涉及测绘技术,具体为一种测斜探头卡阻突破方法及测斜装置。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、测斜装置是测定钻孔倾角和方位角的原位监测仪器,一般用于土石坝、路基、边坡及其隧道等岩土工程中,测量时,通过将测斜管安装在穿过不稳定土层至下部稳定地层的垂直钻孔中,探头在测斜管内由底部向顶部移动(或由顶部向底部移动)时,间隔设定距离获取每一深度段的倾斜角度变化,求出不同高程处的水平位移增量,经过计算得到所需的倾斜角度值。
3、在实际使用时,由于测斜管形变及管内异物的存在,测斜探头下放的过程并不顺畅,下放到测斜管内某一位置时会有探头卡阻现象产生。当出现卡阻现象时,测量探头无法下放到测斜管内需要的深度位置,影响测斜作业的进度。
4、一些手动作业的测斜装置,操作人员会将线缆提升一段距离然后再释放线缆,让测斜探头做一段自由落体运动以冲过卡阻位置。而这种方式依赖于操作者的现场处置经验,在不了解地层状态的情况下,操作者仅凭借经验来判断是否出现卡阻现象容易出现误判,导致线缆频繁拉动探头上升或下降,引起线缆松垮,导致测斜装置的精度下降。
技术实现思路
1、为了解决上述背景技术中存在的技术问题,本发明提供一种测斜探头卡阻突破方法及测斜装置,利用测斜装置中的张力传感器、线缆编码器等器件判断探头下放过程中是否出现卡阻现象,通过控制探头上提再下放的动作尝试突破卡阻位置。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明的第一个方面提供一种测斜探头卡阻突破方法,包括以下步骤:
4、获取探头由初始位置沿测斜管下降的速度v1,下降期间线缆上的张力以及驱动器带动卷盘旋转释放探头下降的速度v2;
5、基于下降期间线缆上的张力、探头所在的深度位置,以及水体对线缆和探头的浮力之和,确定修正后的张力f;
6、保存速度的差值x=v1-v2,当获取速度差值x的次数达到设定值时,根据修正后的张力f、修正后的张力f与实测张力之间的误差值、速度差值x的平均值以及探头下降速度的设定值,确定卡阻程度;
7、基于卡阻程度确定探头下放的目标速度,控制驱动器反转拉起探头设定高度,基于得到的探头下放目标速度控制驱动器正转下放探头,尝试突破卡阻位置。
8、进一步的,当v1<v2时,保存速度的差值x=v1-v2,当v1=v2时,速度差值x清零。
9、进一步的,若保存的速度差值达到设定的保存次数,则计算速度判定值vs,如下式所示:
10、
11、x为速度差值v1-v2,n为储存的差值个数。
12、进一步的,确定卡阻程度,如下式所示:
13、
14、其中,fe为修正后的张力f与实测张力的误差值,v为设定速度,a,b分别为控制速度判定值与张力误差值在计算卡阻程度中所占的比重,根据测斜装置所在的环境确定。
15、进一步的,确定修正后的张力f,如下式所示:
16、f=f线缆拉力-f浮力;
17、f线缆拉力是下降期间线缆上的张力,为实测值,f浮力是水体对线缆以及探头的浮力之和。
18、进一步的,当探头下降的速度恢复到与驱动器带动卷盘旋转释放或回收探头的速度v2相等的状态时,卡阻突破成功;或,当探头下降的深度超过卡阻位置,则卡阻突破成功。
19、进一步的,当探头提升再下降的动作次数超过设定值,并且探头下降的速度仍未恢复到与v2相等时,卡阻突破失败,或,当探头提升再下降的动作次数超过设定值,并且探头所在的深度位置仍未超过卡阻位置时,卡阻突破失败。
20、进一步的,卡阻突破失败时,驱动器通过卷盘带动线缆拉动探头恢复到初始位置,并将卡阻位置信息发送给测斜装置的数据存储器。
21、进一步的,卡阻位置信息根据探头下放的速度与下降动作持续时间的乘积计算得出。
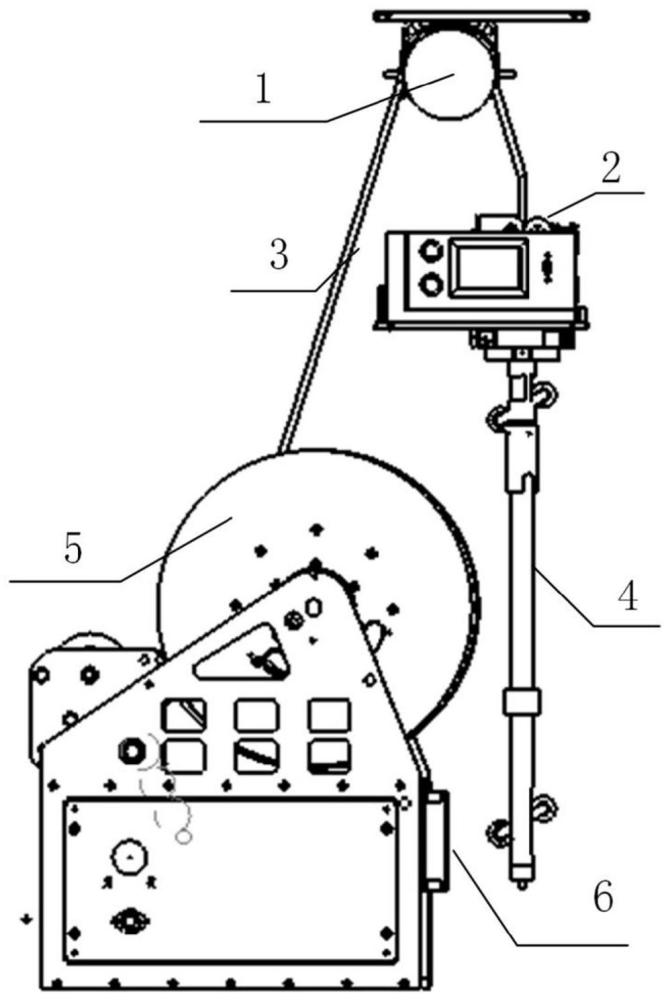
22、本发明的第二个方面提供实现上述卡阻突破方法的测斜装置,包括与固定机构活动连接的卷盘,卷盘上缠绕有线缆,线缆一端穿过张力传感器和编码传感器后与探头连接,探头沿垂直方向布置;
23、卷盘与驱动器连接,驱动器带动卷盘转动,拉动线缆带动探头上升,驱动器反转或不动作,探头下降,探头沿测斜管运动时,在线缆上产生的张力被张力传感器获取,探头运动引起的线缆长度变化被编码传感器获取并转换为速度v1,驱动器带动卷盘旋转通过线缆拉动探头的速度为v2;
24、当线缆编码器获取的速度v1小于v2设定次数时,则出现探头卡阻现象,将探头提升至一定距离后,根据设定的速度下放探头以冲破卡阻。
25、与现有技术相比,以上一个或多个技术方案存在以下有益效果:
26、1、测斜装置工作期间能够基于探头沿测斜管下降的速度和驱动器带动线缆运行的速度之差,判断是否发生卡阻现象,并在发生卡阻现象后,将探头提升至一定距离,根据设定的速度下放探头以冲破卡阻,整个过程模拟操作人员控制探头上升再下降的动作,能够实现自动化,不再依赖操作人员的主观经验,减少人工操作时,线缆承受的额外拉力,并且考虑到地下水的浮力对探头以及线缆的影响,使得判断的过程更加客观,从而延长测斜装置的使用寿命。
27、2、利用测斜装置中的张力传感器、线缆编码器等器件判断探头下放过程中是否出现卡阻现象,通过控制探头上提再下放的动作尝试突破卡阻位置,若达到设定的尝试次数最大值,仍未突破卡阻则判定该次任务失败,装置会自检归位,并上报发生卡阻位置的深度位置信息,便于后续处理。
技术特征:
1.一种测斜探头卡阻突破方法,其特征在于,包括以下步骤;
2.如权利要求1所述的一种测斜探头卡阻突破方法,其特征在于,当v1<v2时,保存速度的差值x=v1-v2,当v1=v2时,速度差值x清零。
3.如权利要求1所述的一种测斜探头卡阻突破方法,其特征在于,若保存的速度差值达到设定的保存次数,则计算速度判定值vs,如下式所示:
4.如权利要求1所述的一种测斜探头卡阻突破方法,其特征在于,确定卡阻程度,如下式所示:
5.如权利要求1所述的一种测斜探头卡阻突破方法,其特征在于,确定修正后的张力f,如下式所示:
6.如权利要求1所述的一种测斜探头卡阻突破方法,其特征在于,当探头下降的速度恢复到与驱动器带动卷盘旋转释放或回收探头的速度v2相等的状态时,卡阻突破成功,或,当探头下降的深度超过卡阻位置,则卡阻突破成功。
7.如权利要求1所述的一种测斜探头卡阻突破方法,其特征在于,当探头提升再下降的动作次数超过设定值,探头下降的速度仍未恢复到与v2相等时,卡阻突破失败,或,当探头提升再下降的动作次数超过设定值,并且探头所在的深度位置仍未超过卡阻位置时,卡阻突破失败。
8.如权利要求8所述的一种测斜探头卡阻突破方法,其特征在于,卡阻突破失败时,驱动器通过卷盘带动线缆拉动探头恢复到初始位置,并将卡阻位置信息发送给测斜装置的数据存储器。
9.如权利要求9所述的一种测斜探头卡阻突破方法,其特征在于,所述卡阻位置信息根据探头下放的速度与下降动作持续时间的乘积计算得出。
10.实现如权利要求1-9任一项所述卡阻突破方法的测斜装置,其特征在于,包括与固定机构活动连接的卷盘,卷盘上缠绕有线缆,线缆一端穿过张力传感器和编码传感器后与探头连接,探头沿垂直方向布置;
技术总结
本发明涉及一种测斜探头卡阻突破方法及系统,包括以下步骤:获取探头由初始位置沿测斜管下降的速度V<subgt;1</subgt;,下降期间线缆上的张力以及驱动器带动卷盘旋转释放或回收探头的速度V<subgt;2</subgt;;基于下降期间线缆上的张力、探头所在的深度位置,以及水体对线缆和探头的浮力之和,确定修正后的张力F;保存速度的差值X=V<subgt;1</subgt;‑V<subgt;2</subgt;,当得到速度差值X的次数达到设定值时,根据修正后的张力F、修正后的张力F与实测张力之间的误差值、速度差值X的平均值以及探头下降速度的设定值,确定卡阻程度;基于卡阻程度确定探头下放的目标速度,控制驱动器反转拉起探头,等待设定时间后,基于得到的探头下放目标速度控制驱动器正转下放探头,尝试突破卡阻位置。
技术研发人员:孙洋,栾贻青,李冉,马孝林,王明瑞,刘永成
受保护的技术使用者:山东乐普韦尔自动化技术有限公司
技术研发日:
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!