一种用于露天矿山装载区的地图区域更新方法及系统与流程
本发明属于工程机械,具体涉及一种用于露天矿山装载区的地图区域更新方法及系统。
背景技术:
1、随着智能化技术的发展,传统采矿工业将逐步走向无人化。一方面,采矿行业是高危行业,无人化的应用亟待落地。另一方面,矿山场景下的机械作业具有单一性和重复性,矿山道路动态不可控因素较少,适合无人驾驶的应用。
2、在矿山环境中自动驾驶矿用卡车需要自主在诸如行驶区、装载区和卸载区等工作场景中执行相应的任务,这对自动驾驶矿用卡车与所处的环境的交互性提出较高要求。解决上述问题,首要任务是实现无人矿卡的定位与周围环境的场景地图构建。gnss技术可以通过测量得到某处的绝对位置解决无人矿卡的定位问题,利用激光雷达等环境感知传感器可以实现场景地图构建。
3、矿区环境下的道路是具有多弯道、高坡度、路面凹凸起伏变换大等特点的非结构化道路。这些道路与周边环境的界限比较模糊,例如矿卡的行驶环境可能伴有悬崖,岩壁等,有必要为其规划一个安全的行驶范围。通过对非结构化道路环境进行区域检测,可根据不同区域变化频率的不同跟踪其变化状态。对于可行驶区道路变化频率低的场景,可降低对环境变化状态的跟踪以节省运算资源。而对于装载区物料的高动态性而言,土石方量的计算与地图的动态更新能力尤为重要,无人矿用卡车在基于地图实现自动驾驶功能的同时,还应该对点云地图进行实时动态更新,并根据更新的结果实现土方量的自动计算,但是,现有技术却无法同时满足前述要求。
4、专利cn114708218a公开了一种路面平整度检测计算方法。该方法通过全景摄像机获取路面数据,选择较为平整的路面作为靶基面,提取靶基面和待测面的数据,将图像数据准换为三维坐标数据,根据基准靶标对待测路面的三维数据进行对比计算,从而准确确定待测路面的平整度以及缺陷部位的位置坐标。但是,一方面该方法要求提供一个较好的先验路面数据,在矿山的非结构化道路上很难不通过拟合直接找到一个相对平整的路面。另一方面该方法涉及将相机录制的平整度数据转换为三维坐标,提升了算法的计算复杂度,且通过相机获取的平整度数据易受光照的影响。
5、专利cn114001678a公开了一种基于车载激光雷达的路面平整度检测方法。获取激光雷达扫描路面得到的点云数据,对点云数据进行滤波,得到第一点云集合,对第一点云集合进行拟合,得到拟合直线;对点云数据进行降采样,得到第二点云集合,根据第二点云集合和拟合直线获得多个单侧距离极值点;根据多个单侧距离极值点确定路面基准直线,该路面基准直线相当于虚拟的三米尺;最后根据路面基准直线和点云数据确定路面的平整度。但是,一方面,拟合路面基准线的过程较为复杂,需要根据最小二乘法和单侧距离极值点进行两次拟合,可能有较大误差;另一方面,用直线而不是平面作为基准可能会遗漏部分路面信息,导致路面平整度计算所涵盖的路面数据不全面。
6、专利cn114037800a提供了一种八叉树地图构建方法。将加速度信息和角速度信息进行预积分得到激光雷达传感器的当前位姿信息,通过当前位姿信息对点云数据进行畸变矫正;通过曲率法检测点云中数据的特征点,利用特征点进行场景关联计算激光雷达传感器的位姿变换信息和当前点云在空间中的位置信息,根据位姿变换信息和位置信息创建并更新八叉树地图。其八叉树地图更新由于需要通过光线投射计算三维栅格中所有的空闲栅格,当激光点距离传感器距离较远时计算量会大大增加。然而实际数据中真正变化频率高的是挖机附近的作业区域,对于远处变化频率不高的环境,每次都进行光线投射会极大浪费计算资源,如何根据环境的变化率合理分配计算资源的问题需要解决。
7、专利cn114612525a在关键帧上使用八叉树地图光线遍历的方法筛选静态地图点,更新稀疏点云地图,保障定位精度。实现场景静态八叉树地图的实时构建和更新。但是,对于车端局部地图的构建采用光线投射法的方式会在更新地图时存在平面消失的现象,原因是由于通常为了保证激光雷达有较大的视野范围,在车辆上一般采用垂直方向放置,而这会造成其在数据采集时激光雷达的光线与路面夹角过大而导致误删除的问题,因此如何改善这个问题也需要进行解决。
8、专利cn113963050a涉及一种基于点云的土方量计算方法。获取地形点云数据和设计平面,将点云数据划分为若干高程区域;分别计算若干高程区域内点云高度坐标的平均值得到该高程区域的平均高程;将设计平面划分为若干多边形;判断所述若干多边形的顶点所位于的高程区域,获取所述若干多边形的顶点所位于高程区域的平均高程作为该多边形顶点的平均高程;并通过多边形顶点的平均高程得到该多边形的计算高程;通过所述若干多边形的面积和计算高程得到土方量,并通过土方量的正负判断是挖方量或填方量。但是,其采用的土方量计算方法较为复杂,采用了多次分割和高程的测量,可能会存在较大测量误差。传统的土石方量算主要是采用全站仪或gps-rtk等测量仪器,获取地面点数据进行量测,不仅工作量大,而且费时费力,特别是对于地形复杂的地区,数据的量测过程将会更加困难,因此选择高效的自动数据采集与处理方式十分重要。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种用于露天矿山装载区的地图区域更新方法及系统,能够精确、细致地划分更新后的区域边界线和区域属性,且操作简单,计算量小。
2、本发明提供了如下的技术方案:
3、第一方面,提供一种用于露天矿山装载区的地图区域更新方法,包括:
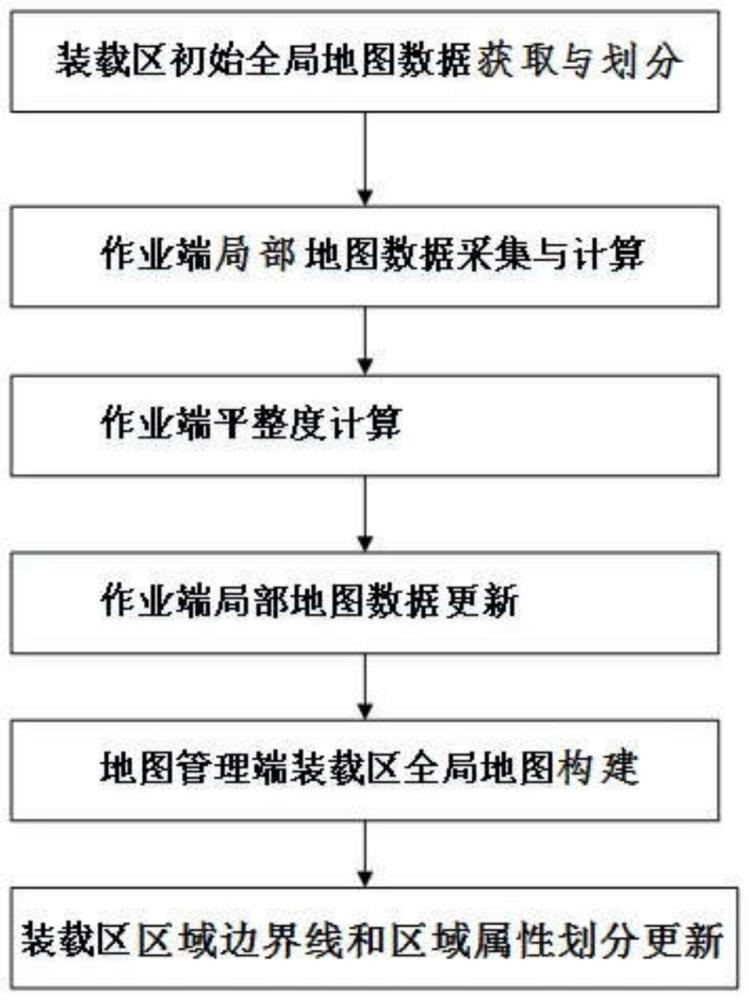
4、获取装载区初始全局地图数据,并划分区域边界线和区域属性;
5、获取作业端局部地图数据;
6、根据所获取的作业端局部地图数据计算作业端平整度;
7、根据所获取的作业端局部地图数据以及所述区域边界线和区域属性,采用改进的光线投射法对不同区域实行不同概率的更新策略,得到更新后的作业端局部地图数据;
8、根据更新后的作业端局部地图数据以及作业端平整度,构建全局地图并进行土方量变化计算;
9、根据全局地图、作业端平整度以及区域边界的约束条件,划分更新后的区域边界线和区域属性。
10、进一步的,所述作业端包括无人矿卡、挖掘机械、辅助作业车辆中的一种或多种。
11、进一步的,所述作业端局部地图数据包括完成时间同步的点云数据、采集单元工作状态数据以及当前道路的属性数据。
12、进一步的,所述作业端平整度的计算方法包括:
13、对作业端局部地图数据中的点云数据依次进行去噪、地面分割,得到参考水平面;
14、对作业端安全范围内的点云数据进行横向和纵向的网格分块,按照先横向再纵向的顺序标记每块区域并编号;
15、提取每块区域内的中心点,计算中心点到参考水平面的向量及距离;
16、根据中心点到参考水平面的向量及距离变化设定区域划分条件,各块区域内网格按照四邻域方式连接,形成区域块;
17、根据区域划分条件进行平整度判定与分级。
18、进一步的,所述区域划分条件包括:
19、中心点到参考平面的距离l1、l2、l3、l4、l5,其中,l1表示平整度为负中,l2表示平整度为负小,l3表示平整度为正小,l4表示平整度为正中,l5表示平整度为正大;
20、每个区域块最小外接多边形面积及其占整体区域的比例,并输出边界线三维坐标;
21、l2和l3组合区域最小外接多边形面积及其占整体区域的比例,并输出边界线三维坐标。
22、进一步的,根据区域划分条件进行平整度判定与分级的方法包括:
23、l1所占比例不超5%,其平整度为负中,代表不可行使凹坑;
24、l2所占比例在30%~40%,其平整度为负小,代表一般可行使凹坑;
25、l3所占比例在30%~40%,其平整度为正小,代表一般可行使凸起;
26、l4所占比例在1%~5%,其平整度为正中,代表障碍物、车辙;
27、l5所占比例在30%~40%,其平整度为正大,代表挡墙;
28、l2和l3组合区域所占比例在30%~40%,其平整度为正大,代表落石区域。
29、进一步的,所述更新后的作业端局部地图数据的获得方法包括:
30、对所获取的作业端局部地图数据进行预处理,包括将点云数据网格化、对点云数据进行去噪和时间同步,得到预处理后的点云数据;
31、对预处理后的点云数据划分区域;
32、根据改进的光线投射法对不同区域的预处理后的点云数据分别进行遍历,提取出每部分区域内的空闲、占据栅格;
33、对不同区域设定不同概率,实现对不同区域的建图和更新。
34、进一步的,所述区域边界至少包括挖掘区边界、挡墙边界、山体边界、落石区边界和可行使区边界。
35、进一步的,所述挖掘区边界的约束条件至少包括:无人矿卡检测到的平整度为l5的区域,最大高度不超过0.5m;无人矿卡检测到的平整度为l5的区域,连续区域最小长度5m;挖掘机械检测到l2和l3组合区域所占比例在50%以上;
36、所述挡墙边界的约束条件至少包括:无人矿卡检测到的地面曲率最大变化不超过设定范围;无人矿卡检测到的平整度为l5的区域,最大高度不超过1.5m;无人矿卡检测到的平整度为l5的区域,连续区域最小长度10m;
37、所述山体边界的约束条件至少包括:无人矿卡检测到的地面曲率最大变化不超过设定范围;无人矿卡检测到的平整度为l5的区域,最大高度超过1.5m;无人矿卡检测到的平整度为l5的区域,连续区域最小长度10m
38、所述落石区边界的约束条件至少包括:无人矿卡检测到l2和l3组合区域所占比例在30%~40%;落石区边界变化范围不超过设定值;最小障碍物尺寸不超过设定值;最小凹坑深度不超过设定值;
39、所述可行使区边界的约束条件至少包括:无人矿卡检测到的地面曲率最大变化不超过设定范围;同时满足l1,l2,l3,l4,l5条件;路面最大宽度为车宽1.5~2倍;最小障碍物尺寸不超过设定值;最小凹坑深度不超过设定值。
40、第二方面,提供一种用于露天矿山装载区的地图区域更新系统,包括:
41、初始数据获取和处理单元,用于获取装载区初始全局地图数据,并划分区域边界线和区域属性;
42、作业端数据获取单元,用于获取作业端局部地图数据;
43、作业端平整度计算单元,用于根据所获取的作业端局部地图数据计算作业端平整度;
44、作业端局部地图更新单元,用于根据所获取的作业端局部地图数据以及所述区域边界线和区域属性,采用改进的光线投射法对不同区域实行不同概率的更新策略,得到更新后的作业端局部地图数据;
45、地图管理端全局地图管理单元,用于根据更新后的作业端局部地图数据以及作业端平整度构建全局地图;
46、地图管理端区域划分单元,用于根据全局地图、作业端平整度以及区域边界的约束条件,划分更新后的区域边界线和区域属性。
47、与现有技术相比,本发明的有益效果是:
48、(1)本发明根据所获取的作业端局部地图数据计算作业端平整度,进而用于构建全局地图以及划分更新后的区域边界线和区域属性,为进一步细致划分区域提供了参数依据;
49、(2)本发明根据所获取的作业端局部地图数据以及基于初始全局地图数据划分的区域边界线和区域属性,采用改进的光线投射法对不同区域实行不同概率的更新策略,得到更新后的作业端局部地图数据,有助于精确划分区域,且计算量小;
50、(3)本发明根据更新后的作业端局部地图数据以及作业端平整度,构建全局地图并进行土方量变化计算,进一步的,根据全局地图、作业端平整度以及区域边界的约束条件,划分更新后的区域边界线和区域属性,划分细致,所划分的区域边界少包括挖掘区边界、挡墙边界、山体边界、落石区边界、可行使区边界。
- 还没有人留言评论。精彩留言会获得点赞!