一种基于飞行器模态试验的可变载荷自由悬吊装置及方法与流程
本发明属于飞行器试验,具体涉及一种基于飞行器模态试验的可变载荷自由悬吊装置及方法。
背景技术:
1、模态是结构系统的固有振动特性。线性系统的自由振动被解耦合为n个正交的单自由度振动系统,对应系统的n个模态,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样的计算或试验分析过程称为模态分析。
2、针对天地一致性的地面模拟试验要求及固体火箭发动机精细化设计原则,越来越多的发动机及相关部件在设计阶段均提出了模态试验测试的试验要求。自由边界模拟作为模态试验过程中较为关键的一环,航天行业标准对其进行了具体的定义:自由边界模拟方式有四种:水平悬吊、竖立悬吊、水平支撑、垂直支撑。
3、qj 3285a-2018《导弹与运载火箭模态试验方法》中提出了关于试验边界条件模拟方法的相关要求;目前,某型火箭结构采用的自由模态悬吊方案使用两点水平悬吊方式,采用航吊的两个吊通过对应使用载荷的橡皮绳对被试件进行两点悬吊,这种悬吊方式应满足如下要求:
4、(1)两个起吊点在火箭结构横向弯曲一阶模态振型的节点附近;安装后模拟系统的刚体运动频率一般应小于参试结构一阶弹性固有频率的1/6;
5、(2)火箭结构的质心靠近两个起吊点之间的中点,悬吊安装时使结构轴线处于水平位置;
6、(3)应对悬挂系统进行频率计算与设计,使模态系统的刚体频率、强度和附加质量等满足自由边界模拟的一般要求;
7、其中,每个起吊点由支撑点、调节器、弹簧、连接夹具及连接件等组成,并且具有以下技术问题:
8、(1)目前模态试验中的被试件质量范围相差较大(50kg-50000kg);若想要获得较为准确的模态参数,必须要求被试件在悬吊状态下整个系统的固有频率低于被试件一阶频率的1/6。若仍然采用传统的悬吊方案,则必须配备大量各类规格的橡皮绳,大幅增加了试验成本。
9、(2)模态试验过程一般需要2-3天的时间,而悬吊系统基本保持不动,采用航吊进行模态试验的悬吊方案存在长期低效率地占用航吊且试验现场必须局限在航吊范围内,导致试验场地不能灵活分配、航吊资源无法灵活调配。
10、(3)目前采用航吊的两个吊钩对被试件进行两点悬吊,这种方案在吊钩间距的调节上只能由操作人员肉眼进行判断,不易与实际起吊点间距保持一致;同时在更换不同试验方案时需要频繁进行被试件的高低调节,为保证被试件自由状态在调节前后基本保持一致,则必须对两吊钩进行高度的精确调节,目前这一过程也只能通过操作人员进行肉眼判断,存在较大的操作误差。
11、为此,本发明提出了一种基于飞行器模态试验的可变载荷自由悬吊装置及方法。
技术实现思路
1、本发明的目的在于解决现有技术所存在的橡皮绳规格繁多、对航吊的利用效率低下且不易进行起吊点间距及起吊点高度的精确调节的问题,为此提供了一种基于飞行器模态试验的可变载荷自由悬吊装置及方法。
2、为实现上述目的,本发明所提供的技术解决方案是:
3、一种基于飞行器模态试验的可变载荷自由悬吊装置,其特殊之处在于:
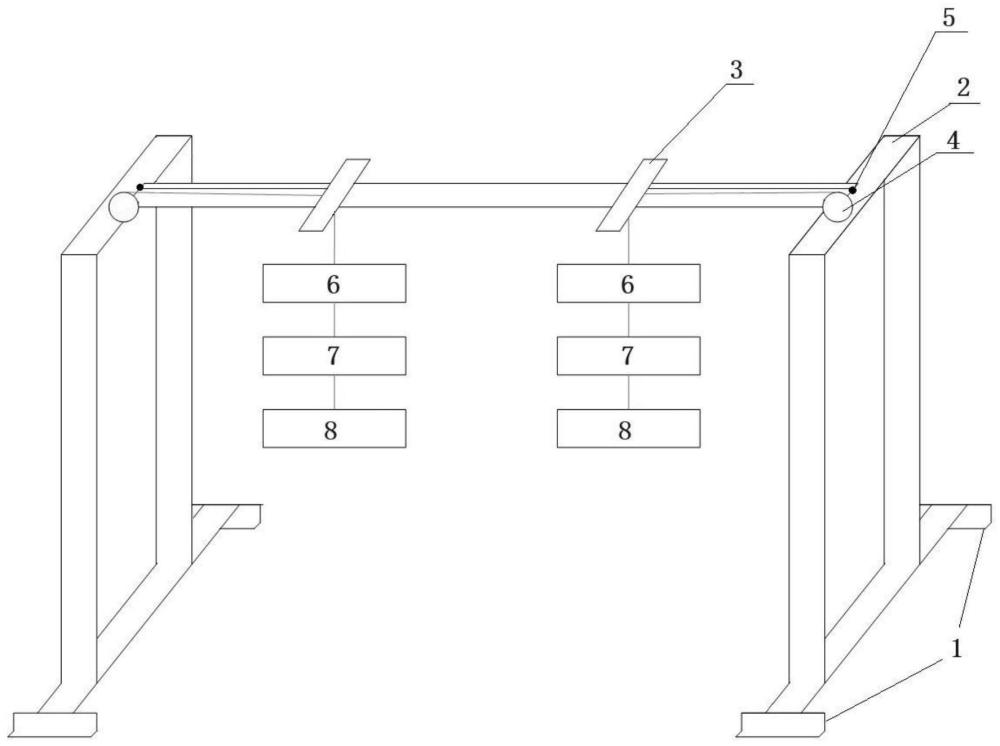
4、包括承力支架、吊钩控制单元和载荷单元;
5、所述承力支架包括支撑龙门和两个吊钩横梁;
6、所述支撑龙门包括两个高度相同的支撑架和一根支撑横梁;所述支撑横梁的两端与两个支撑架中轴线的顶端相连接,且与地面保持水平;所述支撑架的中轴线穿过支撑架的重心;所述支撑横梁的长度方向设有开口向上的直线凹槽;
7、所述吊钩横梁设置在支撑横梁上端面,吊钩横梁的下端面的中心处设有一个凸滑轮,所述凸滑轮配合在直线凹槽内,控制吊钩横梁沿直线凹槽水平滑动;所述吊钩横梁的下端面设有若干个吊钩,所述载荷单元连接在吊钩上;
8、所述吊钩控制单元有两组,包括拉线位移传感器和自锁滑轮;
9、所述拉线位移传感器一端固定在吊钩横梁上,一端缠绕在自锁滑轮上;
10、所述自锁滑轮设置在支撑架长度方向的中轴线上,自锁滑轮的轴线平行于支撑架的长度方向;
11、所述载荷单元有两组,自上而下依次为称重装置、手摇葫芦、可变载荷橡皮绳吊具;
12、所述称重装置包括两端的悬吊绳,其中一端悬挂在吊钩上,另一端连接在手摇葫芦上;
13、所述可变载荷橡皮绳吊具包括上盘、下盘和多组橡皮绳;所述上盘与下盘的中心轴线相重合且与地面垂直;所述上盘和下盘的中心处都设有螺纹吊孔,上盘通过螺纹吊孔连接在手摇葫芦上;被试件通过两个所述下盘的螺纹吊孔连接在下盘的下端;所述上盘和下盘的盘面上都设有对应的多组橡皮绳穿孔,且每组橡皮绳穿孔都设置在与盘面同心的圆环上且沿盘面中心对称;所述多组橡皮绳长度相同,穿过橡皮绳穿孔连接上盘和下盘。
14、进一步地,所述上盘和下盘为圆盘,为上圆盘和下圆盘。
15、进一步地,所述下圆盘通过螺纹吊孔连接飞行器的吊环、吊钩或吊带。
16、优选地,所述上圆盘和下圆盘尺寸相同。
17、一种飞行器模态试验方法,其特殊之处在于,采用上述基于飞行器模态试验的可变载荷自由悬吊装置,包括以下步骤:
18、步骤1:将所述凸滑轮与直线凹槽的接触点称为起吊点,根据被试件尺寸及试验实施方案调整两个起吊点之间的间距;
19、步骤2:根据试验要求调整所述两个吊钩横梁之间的间距并通过拉线位移传感器进行精确定位,定位完成后采用自锁滑轮对两个吊钩横梁的位置进行锁定;
20、步骤3:根据被试件质量确定所述两个起吊点的起吊载荷,再根据起吊载荷确定可变载荷橡皮绳吊具使用的橡皮绳规格与串绕组数,组装可变载荷橡皮绳吊具;
21、步骤4:将被试件采用航吊放置在本装置的下方,依次连接吊钩横梁、手摇葫芦、称重装置和可变载荷橡皮绳吊具;
22、步骤5:通过所述手摇葫芦带动两个起吊点上升,实现起吊被试件,直至操作人员确认被试件的两个起吊点的起吊高度一致后,停止起吊;
23、步骤6:进行模态测试工作;
24、步骤7:确认完成测试工作并测得数据完整无误后,通过所述手摇葫芦带动两个起吊点缓慢下降,并将被试件放置在吊车的被试件专用弧形架上;
25、步骤8:吊车将模态测试后的被试件进行转移;拆卸可变载荷吊具,完成试验。
26、本发明的优点是:
27、1.本发明采用力传感器监测各起吊点处的受力大小、采用位移传感器监测两个起吊点之间的间距,替代了操作人员对两个起吊点之间的间距的肉眼判断,极大缩小了测量误差,保证了试验状态的一致性,提高了试验效率。
28、2.本发明中弹簧橡皮绳组数可方便快捷地进行增减,在满足模态试验要求的同时实现了弹簧橡皮绳的通用化应用,节约了试验成本,具有较高的经济价值。
29、3.本发明在脱离吊车的情况下由工艺操作人员独立完成被试件的悬吊及状态调整工作,简化了试验步骤,节约了人力资源和航吊资源。
30、4.本发明可适用于包括航空、航天领域在内的多种领域的结构强度自由模态试验,使用过程简单高效,通用化程度较高,在满足试验边界条件模拟方法的相关要求方面具有较高的参考价值。
- 还没有人留言评论。精彩留言会获得点赞!