一种捣固车精捣里程同步方法与流程
本技术涉及铁路工程机械,尤其涉及一种应用于钢轨线形捣固修复的捣固车精捣里程同步方法。
背景技术:
1、截至2020年,全国铁路营业里程已达到14.63万公里,其中高铁达到3.79万公里。而到2035年全国铁路网预计将达到20万公里左右,其中高铁7万公里左右。铁路线路是铁路运输中的基础设施,在列车长时间运行和自然条件作用下,铁路线路会不可避免地发生变形或损坏。随着铁路的快速发展,确保铁路运输的安全性和可靠性成为我国高速铁路发展过程中面临的又一大挑战。为了确保列车安全、平稳、快速运行,延长线路各组成部分的使用寿命,必须加强线路的养护和维修工作,使线路设备经常保持良好的状态。其中线路石砟的捣固密实是一项极为重要的工作,现在主要靠铁路大型养路机械中的捣固车完成。对于捣固车而言,线路里程的精确定位非常重要,关系到线路捣固tqi(即轨道不平顺质量指数),当前捣固车的里程定位依靠里程编码器,由于轮径测量误差、里程编码器系统误差以及轮子打滑,导致捣固车行进过程中存在累计误差,因此,每隔一段距离,捣固车就需要通过对准线路上人工标记的里程进行里程同步,费时费力。
2、目前在铁路的新线建设、既有线大修和维修作业中,铁路捣固车段使用捣固车对轨道进行拨道、起道超平、石砟捣固以及道床枕肩部石砟的夯实等作业,使轨道方向、左右水平和前后高低均达到线路设计标准或者线路维修规则要求,提高道床石砟的密实度,增加轨道的稳定性,保证列车安全运行。捣固车的精捣作业需要知道线路的精确里程,当前捣固车里程测量采用脉冲测量式里程编码器,由于编码器存在累计误差,每隔一段距离需要对准线路上人工标注的里程同步点进行人工里程同步,因此每次精捣作业前不仅需要在线路上人工标注里程,而且捣固过程中捣固车在里程同步点需要停下来对里程,费时费力。目前捣固车里程同步方案的技术缺陷主要有:
3、一是采用人工对准方式,在里程同步点捣固车需要停下来进行里程校准,其对准精度与操作人员的经验和责任心直接相关,大大降低了捣固车作业效率;
4、二是采用人工标注里程,捣固车在每次精捣作业前,需要在线路上人工标注里程,如果线路线形多次修改,就需要重复标注里程,操作过程十分繁琐。
5、在现有技术中,主要有以下技术方案与本技术相关:
6、现有技术1为中铁大桥科学研究院有限公司、中铁大桥局集团有限公司于2017年11月01日申请,并于2018年05月08日公开,公开号为cn108009203a的中国发明申请。该申请公开了一种铁路里程与坐标相互转换的方法,涉及铁路线路管理领域,包括采集铁路线路的几何线形,根据所述几何线形和铁路里程信息生成铁路线路的矢量数据,形成一维线性参照系,并记录各矢量数据的节点信息;在铁路线路上选取至少两个里程控制点,并记录两个里程控制点在二维平面参考系上的坐标信息;使用两个里程控制点的坐标信息与节点信息建立一维线性参照系与二维平面参考系的对应关系;使用对应关系完成铁路里程与坐标的相互转换。该发明铁路里程与坐标相互转换的方法通过线要素的简化与存储方式的设计,在最大限度保证转换精度的前提下,减小了数据存储量和转换计算量,满足了快速实时转换的要求。
7、现有技术2为包头市绘宇测绘服务有限责任公司于2020年11月26日申请,并于2021年02月26日公开,公开号为cn112414429a的中国发明申请。该申请公开了一种铁路里程测量方法,包括以下步骤:铁路里程测量车沿铁路运行,gnss模块实时获取铁路里程测量车在铁路轨道上行进的铁路中线的经纬度坐标;根据所需的测量类型,通过测量车的工控机配置里程间隔和海拔参数,分别通过直线或曲线模型计算铁路里程,测量人员选择是否继续测量,若选择继续测量,则返回重新测量,若选择终止测量,则导出工控机计算的里程数据,得出铁路里程距离,完成铁路里程测量。gnss实时采集铁路中线坐标,并通过工控机内的算法能够计算出精确的铁路里程距离。该发明提高了铁路里程测量精度,改变了传统的里程测量作业模式,提高了安全系数,测量效率高。
8、现有技术3为梁帆、余旸于2019年09月21日申请,并于2020年09月04日公开,公开号为cn111623796a的中国发明申请。该申请公开了一种基于信息融合的钢轨里程估计方法,通过以下步骤实现对钢轨廓形的检测:s1)采集里程计数据;s2)采集gps数据并将其转化为里程数据;s3)利用卡尔曼滤波分别对里程计测量数据和gps里程数据建模;s4)利用卡尔曼滤波进行数据融合并获得位置信息。该发明通过智能算法的运用实现对钢轨探伤里程位置信息的实时智能检测,完成探伤里程数据采集,实现伤损定位,提高了探伤工作的实时性和准确度,避免了重复探伤浪费人力资源和降低作业效率,能够更好地估测钢轨伤损部位的里程数,为铁道的安全防护和运营安全提供有效信息。
9、现有技术4为中航西安飞行自动控制技术有限公司于2013年12月11日申请,并于2015年06月17日公开,公开号为cn104711912a的中国发明申请。该申请公开了一种高速铁路里程对标方法,包括以下步骤:1.1)里程仪数据采集与处理;1.2)初始里程数据采集;1.3)里程计算;1.4)卫星数据采集;1.5)轨道坐标-里程数据库数据采集;1.6)里程对标修正。该发明采用高分辨率光电里程仪和高精度差分卫星组合定位技术,实现在正线、桥梁、隧道等多种条件的高速铁路里程定位精度优于0.1m,小于轨枕铺设间距0.625m,可以将轨道故障精确定位到具体轨枕,提高维修检测工作效率。
10、现有技术5为江苏广义牵引技术研究所有限公司、中车眉山车辆有限公司于2020年07月29日申请,并于2020年11月06日公开,公开号为cn111896025a的中国发明申请。该申请公开了一种公铁车铁路状态和公路状态里程记录系统及记录方法,包括永磁同步发电机、plc模块及远程发报模块,所述的永磁同步发电机与plc模块之间设有测量所发电频率的频率传感器,plc模块连接有接收公路状态时公铁车里程信息的gps模块,plc模块输出端连接接收公铁车里程数据的远程发报模块。该发明通过plc模块计算出实时的轮轴的转速,以此计算公铁车处于铁路状态时不同时刻的里程数并加以累积,得出公铁车处于铁路状态时的总里程;plc模块接收gps模块得到公铁车处于铁路状态时的里程信息并累积,累积的公铁车总里程数通过远程发报模块发出,从而可以及时掌握公铁车准确的运行里程数,方便有针对性地制定车辆的维护检修方案,减少资源浪费。
11、以上现有技术1-5均提出使用gnss获取轨道坐标,完成对铁路里程的测量。然而,上述现有技术所提方案均采用了近似的方法计算里程,并未使用严密的坐标正算里程方法,而且近似方法有两种,一种直接建立密集的里程-坐标数据库,然后通过内插的方法得到铁路每个点的里程;另一种是获取铁路圆曲线半径近似计算每一段铁路的gnss里程,然后累加得到总的铁路里程。这两种近似计算方法均存在前期建立数据库困难、精度不高的技术问题,且现有技术1-5均未涉及对捣固车精捣进行里程同步的方法。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种捣固车精捣里程同步方法,以解决现有里程同步方法需要人工标记里程、人工里程同步,无法消除里程编码器的累计误差,作业人员多,捣固作业效率低的技术问题。
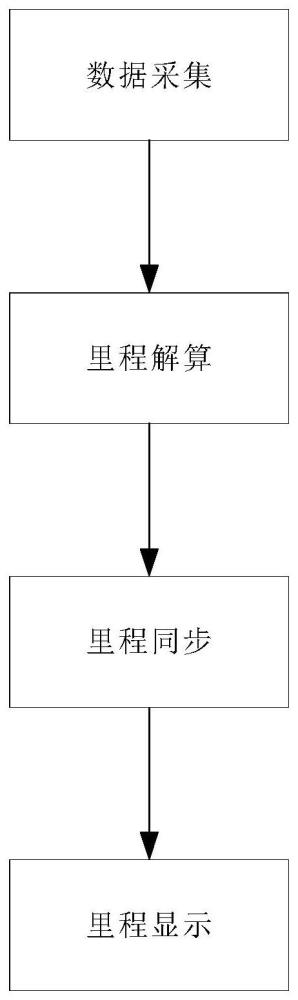
2、为了实现上述发明目的,本技术具体提供了一种捣固车精捣里程同步方法的技术实现方案,捣固车精捣里程同步方法,包括以下步骤:
3、s1)获取捣固车所处线路的gnss里程;
4、s2)结合获取到的编码器里程及线路的gnss里程进行里程同步。根据捣固车实际作业速度和需要在里程同步点使用gnss里程校准编码器里程,从而得到校准编码器里程,其余情况则采用校准编码器里程。
5、进一步的,所述步骤s1)包括:
6、s11)通过高斯投影将gnss接收机获得的cgcs2000坐标转换至测量建网时建立的平面坐标系;
7、s12)根据投影后的高斯平面坐标判断其所在的曲线元;
8、s13)根据投影后的高斯平面坐标所在的曲线元计算该高斯平面坐标的线路gnss里程。
9、进一步的,在所述步骤12)中,分别以曲线元的起点s和终点e为坐标原点,以线路切线为x轴,沿线路前进方向为正。以垂直于x轴的法线为y轴,指向线路左边桩为正,建立法切线局部坐标系x′sy′和x″ey″。s(xs,ys)为曲线元起点坐标,fs为起点切线方位角,e(xe,ye)为曲线元终点坐标,fe为终点切线方位角。根据以下公式分别求取边桩点pi(xi,yi)(i=1,2,3)到过曲线元se起终点指向坐标桩法线的垂距dsi及dei:
10、
11、进一步的,在所述步骤12)中:
12、当dsi≤0和dei≤0同时成立时,判断边桩点a位于曲线元se后方的曲线元内;
13、当dsi≥0和dei≤0同时成立时,判断边桩点a位于曲线元se范围内;
14、当dsi≥0和dei≥0同时成立时,判断边桩点a位于曲线元se前方的曲线元内。
15、进一步的,在所述步骤13)中,根据任意里程处边桩点a的实测坐标(xa,ya),计算点a位于己知曲线上的里程ka及距中距离b。
16、进一步的,所述步骤s13)包括以下过程:
17、s131)按照线路正算公式计算任意边桩点a的里程k1处的切线方位角αk1及线路中心坐标(x1,y1),在计算时根据k1位于曲线的不同位置按照不同公式进行;
18、s132)按照δk1=(ya-y1)cos(αk1-90°)-(xa-x1)sin(αk1-90°)计算点a至k1法线的距离δk1;
19、s133)令k2=k1+δk1,按照线路正算公式计算里程k2处的切线方位角αk2及线路中心坐标(x2,y2);
20、s134)计算点a至k2法线的距离δk2;
21、s135)检查δk2,若|δk2|≤kd,则点a在己知曲线上的里程ka=k2+δk2,点a至线路中线的距离b=(ya-y2)cosαk2-(xa-x2)sinαk2,且当b>0时,判断点a位于线路右侧,当b<0时,判断点a位于线路左侧;
22、s136)若判断|δk2|>kd,令k3=k2+δk2,继续按照线路正算公式计算里程k3的切线方位角αk3及线路中心坐标(x3,y3),直到|δk3|≤kd;
23、s137)点a在己知曲线上的里程ka=k3+δk3,计算点a至线路中线的距离b=(ya-y3)cosαk3-(xa-x3)sinαk3,且当b>0时,点a位于线路右侧,当b<0时,点a位于线路左侧。
24、进一步的,在所述步骤131)中,当k1位于第一缓和曲线段时,根据以下线路正算公式计算高斯平面坐标的线路gnss里程:
25、
26、
27、
28、式中,(xzh,yzh)为zh点坐标,kzh为zh点里程,r为曲线半径,αzh为zh点至交点jd的方位角,l0为缓和曲线长度,l1为k1至zh点的里程差,l1=k1-kzh。
29、进一步的,在所述步骤131)中,当k1位于圆曲线段时,根据以下线路正算公式计算高斯平面坐标的线路gnss里程:
30、
31、
32、
33、式中,(xzh,yzh)为zh点坐标,khy为hy点里程,r为曲线半径,αzh为zh点至交点jd的方位角,l0为缓和曲线长度,ly为k1至hy点的里程差,ly=k1-khy,d为k1至hy点的弦线长度,
34、进一步的,在所述步骤131)中,当k1位于第二缓和曲线段时,根据以下线路正算公式计算高斯平面坐标的线路gnss里程:
35、
36、
37、
38、式中,(xhz,yhz)为hz点坐标,khz为hz点里程,r为曲线半径,l0为缓和曲线长度,l2为hz点至k1的里程差,l2=khz-k1,αzh2表示下一段zh点至交点jd的方位角。
39、进一步的,在所述步骤131)中,当k1位于直线段时,根据以下线路正算公式计算高斯平面坐标的线路gnss里程:
40、x1=xhz+l3cosαzh
41、y1=yhz+l3sinαzh
42、式中,(xhz,yhz)为hz点坐标,khz为hz点里程,αzh为zh点至交点jd的方位角,l3为hz点至k1的里程差,l3=k1-khz。
43、进一步的,在接收机天线。安装过程中量测捣固车自身里程同步点位与接收机天线。安装处的距离偏差,对接收机天线。处的线路gnss里程进行距离偏差修正,获得测捣固车自身里程同步点处的线路gnss里程。
44、进一步的,在步骤s1)之后包括以下步骤:
45、显示当前gnss里程、gnss定位状态、水平精度因子及坐标、通信状态,当且仅当gnss定位状态为固定解时,才能利用gnss里程,当gnss里程不可用时gnss里程为空,并显示警示信息。
46、进一步的,gnss接收机包括接收机主体、接收机天线及移动通信天线。在所述步骤s11)之前包括以下步骤:
47、s10)所述接收机天线接收卫星发送的定位信号,所述移动通信天线抓取通过网络实时动态载波相位差分技术播发的虚拟基准站观测值。所述接收机主体通过对定位信号及虚拟基准站观测值进行处理得到高精度定位卫星导航坐标数据,再通过串口或网口分发卫星导航坐标数据。
48、进一步的,gnss接收机包括接收机主体、接收机天线及移动通信天线。在所述步骤s11)之前包括以下步骤:
49、s10)所述接收机天线接收卫星发送的定位信号,所述移动通信天线抓取通过网络实时动态载波相位差分技术播发的虚拟基准站观测值。所述接收机主体通过对惯导数据、定位信号及虚拟基准站观测值进行处理得到高精度定位组合导航坐标数据,再通过串口或网口分发卫星导航坐标数据。
50、通过实施上述本技术提供的捣固车精捣里程同步方法的技术方案,具有如下有益效果:
51、(1)本技术捣固车精捣里程同步方法,利用gnss高精度定位技术,结合线路线形优化参数解算线路gnss里程,在里程同步点将gnss里程用于捣固车编码器里程校准,捣固车使用校准编码器里程指导捣固作业,可以消除里程编码器的累计误差,提升捣固效率,减少作业人员;
52、(2)本技术捣固车精捣里程同步方法,在铁路线路空旷地带无需人工标记里程、人工里程同步,能够对铁路线路坐标进行高精度高频率采集,同时结合gnss/惯导组合导航或者单gnss定位,高精度坐标通过高斯投影、曲线元查找、里程正算获得铁路线路高精度里程,指导捣固车在里程同步点进行里程同步,可以有效降低铁路线路不平顺质量指数,从而实现对铁路里程的高精度测量;
53、(3)本技术捣固车精捣里程同步方法,通过导入测量优化的线路线形几何参数,线路上无需人工标记里程点同步点,且线路线形几何参数修改时,只需要导入修改的线路线形几何参数即可获得新的线路里程,省去了在线路上人工标注里程的繁琐过程,减少了作业人员;
54、(4)本技术捣固车精捣里程同步方法,通过gnss接收机实时获取铁路线路高精度定位信息,实时解算捣固车当前铁路里程,捣固车在里程同步点处无需停下来人工对准里程,能够进一步提升捣固作业效率,减少作业人员。
- 还没有人留言评论。精彩留言会获得点赞!