标签生成方法、装置、设备及存储介质与流程
本技术涉及信息处理,更具体地说,涉及一种标签生成方法、装置、设备及存储介质。
背景技术:
1、自动驾驶系统离不开地图,而高精地图是目前自动驾驶系统中的主流地图,但是高精地图制作方法复杂、维护成本高,在道路的维修和更新速度迅速的场景下,高精地图的更新无法适应道路的维修和更新速度,可能无法提供最新的道路信息,会对自动驾驶系统的准确性和安全性造成影响。
2、为了适应道路的维修和更新速度,在自动驾驶过程中引入了自动生成矢量地图的方法,以基于实时生成的矢量地图进行自动驾驶控制。其中,鸟瞰视图下的深度学习方法这一矢量地图生成方法是目前的研究热点,鸟瞰视图下的深度学习方法在自动驾驶过程中利用训练好的深度神经网络对鸟瞰视图下的图片和雷达帧进行处理,以生成矢量地图元素,进而根据矢量地图元素生成矢量地图。而深度神经网络的训练需要用到标注有道路元素标签的图片及雷达帧,目前的图片及雷达帧的道路元素标签都是人为标注的,不仅效率低,还会耗费大量的人力。
技术实现思路
1、有鉴于此,本技术提供了一种标签生成方法、装置、设备及存储介质,以提高标签标注效率。
2、为了实现上述目的,现提出的方案如下:
3、一种标签生成方法,包括:
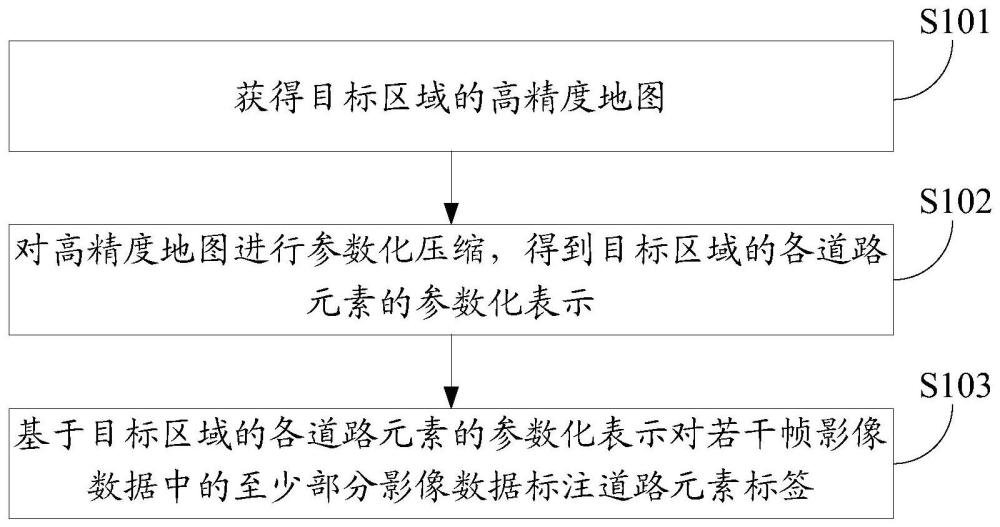
4、获得目标区域的高精度地图;所述高精度地图基于采集车在所述目标区域的道路上行驶时采集的若干帧影像数据构建生成;
5、对所述高精度地图进行参数化压缩,得到所述目标区域的各道路元素的参数化表示;任一道路元素的参数化表示表征所述任一道路元素的分布位置;
6、基于所述目标区域的各道路元素的参数化表示对所述若干帧影像数据中的至少部分影像数据标注道路元素标签。
7、上述方法,可选的,所述对所述高精度地图进行参数化压缩,包括:
8、对于所述高精度地图上的任一路径,在全局坐标系中基于所述任一路径上的若干采样点的坐标,拟合第一曲线和第二曲线,得到对应于所述任一路径的所述第一曲线的第一参数组以及所述第二曲线的第二参数组;所述第一曲线表征所述任一路径的平面分布位置,所述第二曲线表征所述任一路径的高程分布位置;不同的路径属于同一道路的不同路段或者属于不同的道路;
9、基于所述任一路径建立路径坐标系,在所述路径坐标系中获得所述任一路径上的各个道路元素的参数化表示。
10、上述方法,可选的,所述在所述路径坐标系中获得所述任一路径上的各个道路元素的参数化表示,包括:
11、如果所述任一路径上的道路元素包括目标道路元素,所述目标道路元素为道路边缘或车道分隔线,对于任一目标道路元素,基于所述任一目标道路元素上的若干采样点的坐标,拟合第三曲线和第四曲线,得到对应于所述任一目标道路元素的所述第三曲线的第三参数组以及所述第四曲线的第四参数组;所述第三曲线和所述第一曲线是同类型曲线,所述第四曲线和所述第二曲线是同类型曲线;
12、如果所述任一路径上的道路元素包括停止线,记录所述停止线在所述路径坐标系中的起点和终点,作为所述停止线的参数化表示;
13、如果所述任一路径上的道路元素包括人行横道,基于所述人行横道的边界构建四边形,记录所述四边形的顶点作为所述人行横道的参数化表示。
14、上述方法,可选的,对所述至少部分影像数据标注道路元素标签的过程,包括:
15、对于所述至少部分影像数据中的任一帧影像数据,获取所述采集车采集所述任一帧影像数据时在所述全局坐标系中的目标坐标;
16、基于各个路径的参数化表示确定与粗筛区域有交集的路径集合;所述粗筛区域是以所述目标坐标为中心的矩形区域;
17、基于所述路径集合内的各个路径上的道路元素的参数化表示,确定与细筛区域有交集的道路元素集合;所述细筛区域是以所述目标坐标为中心的矩形区域;所述细筛区域小于所述粗筛区域;
18、将所述道路元素集合与所述任一帧影像数据相关联。
19、上述方法,可选的,所述基于所述目标区域的各道路元素的参数化表示对所述若干帧影像数据中的至少部分影像数据标注道路元素标签,包括:
20、获取所述目标区域内各个路径的中心坐标;不同的路径属于同一道路的不同路段或者属于不同的道路;
21、对于任一中心坐标,在以所述任一中心坐标为中心的区域内的各采集坐标对应的影像数据中进行采样,获得所述任一中心坐标对应的预设数量的影像数据;
22、将各中心坐标对应的预设数量的影像数据合并,得到目标影像数据集;
23、基于所述目标区域的各道路元素的参数化表示对所述目标影像数据集中的影像数据标注道路元素标签。
24、上述方法,可选的,所述目标区域内的路径至少包括两种类型:直行路段、交叉路口;所述方法还包括:
25、统计所述目标影像数据集中的影像数据在各个路径类别的分布情况;
26、如果所述分布情况表征所述目标影像数据集中的影像数据在各个路径类别的分布不均匀,确定目标路径类别;其中,所述目标影像数据集中的影像数据在所述目标路径类别上的分布数量小于在非目标路径类别上的分布数量;
27、对于任一属于所述目标路径类别的路径的中心坐标,在以该中心坐标为中心的区域内的各采集坐标对应的影像数据中重新采样;
28、将重新采样的影像数据添加到所述目标影像数据集中。
29、上述方法,可选的,在重新采样之前,还包括:
30、获得所述目标影像数据集中属于所述目标路径类别的影像数据的数量,与所述若干帧影像数据中属于所述目标路径类别的影像数据的数量的比值;
31、如果所述比值小于目标比值,执行所述对于任一属于所述目标路径类别的路径的中心坐标,在以该中心坐标为中心的区域内的各采集坐标对应的影像数据中重新采样的步骤。
32、一种标签生成装置,包括:
33、获得模块,用于获得目标区域的高精度地图;所述高精度地图基于采集车在所述目标区域的道路上行驶时采集的若干帧影像数据构建生成;
34、压缩模块,用于对所述高精度地图进行参数化压缩,得到所述目标区域的各道路元素的参数化表示;任一道路元素的参数化表示表征所述任一道路元素的分布位置;
35、标注模块,用于基于所述目标区域的各道路元素的参数化表示对所述若干帧影像数据中的至少部分影像数据标注道路元素标签。
36、一种标签生成设备,包括存储器和处理器;
37、所述存储器,用于存储程序;
38、所述处理器,用于执行所述程序,实现如上任一项所述的标签生成方法的各个步骤。
39、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实现如上任一项所述的标签生成方法的各个步骤。
40、从上述的技术方案可以看出,本技术实施例提供的标签生成方法、装置、设备及存储介质,获得目标区域的高精度地图;该高精度地图基于采集车在目标区域的道路上行驶时采集的若干帧影像数据构建生成;对高精度地图进行参数化压缩,得到目标区域的各道路元素的参数化表示;任一道路元素的参数化表示表征该任一道路元素的分布位置;基于目标区域的各道路元素的参数化表示对上述若干帧影像数据中的至少部分影像数据标注道路元素标签。本技术提供了一种基于高精度地图自动生成影像数据的道路元素标签的方案,从而提高了标签标注效率。
- 还没有人留言评论。精彩留言会获得点赞!