一种基于毫米波雷达的抖腿监测方法以及装置与流程
本发明涉及毫米波雷达领域,具体涉及一种基于毫米波雷达的抖腿监测方法以及装置。
背景技术:
1、在社交场合,抖腿被视为一种不雅的行为。抖腿通常可分为两种类型:习惯性抖腿和神经性抖腿,后者也被称为不宁腿综合征,是一种神经性疾病,需要采取医学手段进行控制和治疗。大多数抖腿属于无意识的习惯性行为,通常是从小就形成的不良习惯。对于这种无意识的抖腿行为,一旦养成习惯就难以戒除。
2、已有公开号为cn212747826u的《抖腿监测器》包括器体以及夹持件,夹持件与器体呈对接布置,器体包括多轴传感器、存储件以及传输件,多轴传感器用于监测抖腿频率,存储件用于存储抖腿数据,传输件将存储件的数据传输至后台服务器,夹持件对接外部,实现器体安设。使用时,将夹持件安设在鞋子、裤子等,当腿部抖腿时,多轴传感器监测到抖腿,将数据存储在存储件,经过一段时间或者需要提取数据时,传输件提取存储件中的数据后,将数据传输至后台服务器,从而实现数据的提取。这一技术方案存在以下问题:依赖于需要一直佩戴的可穿戴设备,这给用户带来了不便并降低了使用体验。因此,这种需要长时间佩戴设备的抖腿监测方案在实际使用中并不方便。
技术实现思路
1、鉴于上述问题,本发明提供了一种基于毫米波雷达的抖腿监测方法以及装置,解决了现有的抖腿监测方案需要依赖于可穿戴设备,使用不便的问题。
2、为实现上述目的,在第一方面,本发明提供了一种基于毫米波雷达的抖腿监测方法,包括:
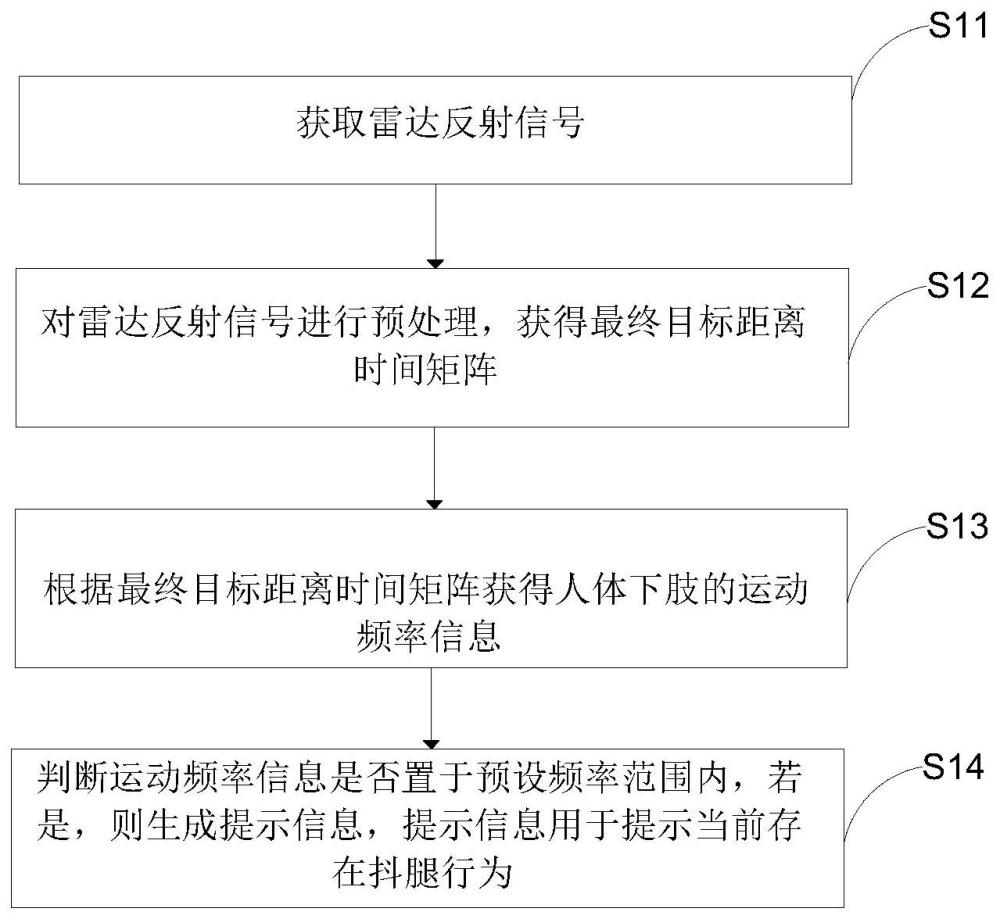
3、获取雷达反射信号,雷达反射信号包括待测区域的原始数据,雷达反射信号由多个持续时间相同的连续帧组成;
4、对雷达反射信号进行预处理,获得最终目标距离时间矩阵,最终目标距离时间矩阵包括人体下肢活动数据;
5、根据最终目标距离时间矩阵获得人体下肢的运动频率信息,运动频率信息包括当前人体下肢的抖动频率;
6、判断频率信息是否置于预设频率范围内,若是,则生成提示信息,提示信息用于提示当前存在抖腿行为。
7、在一些实施例中,对雷达反射信号进行预处理,获得最终目标距离时间矩阵包括:
8、对雷达反射信号的每一帧进行快速傅里叶变换,生成一个维度为k的距离向量,再将连续帧中获取的距离向量合成一个k×m的二维矩阵,记为初始距离时间矩阵,m为连续帧的帧数;
9、对初始距离时间矩阵进行静态背景消除,获得待测距离时间矩阵;
10、对待测距离时间矩阵进行目标提取,获得活动目标的距离时间矩阵,活动目标包括人体下肢;
11、对活动目标的距离时间矩阵进行峰值检测,提取每一个距离向量中强度最大的距离块,获得最终目标距离时间矩阵。
12、在一些实施例中,初始距离时间矩阵包括多个初始距离向量,每个初始距离向量内包含多个初始距离块,对初始距离时间矩阵进行静态背景消除包括:
13、对每一初始距离向量中的背景杂波进行滤除,获得包含多个活动目标的待测距离时间矩阵,背景杂波为静态事物在雷达产生的距离信息。
14、在一些实施例中,背景杂波通过公式(1)表示,公式(1)如下:
15、
16、公式(1)中,ns为预设用于提取静态背景的初始雷达信号帧的数量,s(:,t)为初始雷达信号每一帧的信号,t为时间间隔,sclutter(:,t)为提取的背景杂波;
17、待测距离时间矩阵所对应的雷达信号可通过公式(2)表示,公式(2)如下:
18、s(:,t-ns+1:t)=s(:,t-ns+1:t)-sclutter(:,t)
19、在一些实施例中,对所述待测距离时间矩阵进行目标提取,获得活动目标的距离时间矩阵包括:
20、对待测距离时间矩阵的每一个距离向量进行活动目标提取,去除环境噪声,获得仅包括活动目标的距离向量,每个活动的目标对应于距离向量中的一个距离块,将多个连续的距离向量合成活动目标的距离时间矩阵;
21、对待测距离时间矩阵的每一个距离向量进行活动目标提取,去除环境噪声,获得仅包括活动目标的距离向量包括:
22、获取距离向量中以任一距离块为中心的第一预设范围内的其余距离块的雷达信号强度值,并记为参考信号强度值;
23、根据参考信号强度值获得环境噪声;
24、获取当前距离块的雷达信号强度值,记为第一信号强度值,判断第一信号强度值与环境噪声是否匹配,若是,则将当前距离块的第一信号强度值置0,若否,则保留该距离块。
25、在一些实施例中,对活动目标的距离时间矩阵进行峰值检测,提取每一个距离向量中强度最大的距离块,获得最终目标距离时间矩阵包括:
26、识别活动目标的距离时间矩阵中的每一个距离向量中的多个峰值点;
27、以每一峰值点为中心的第二预设范围作为最小划分单位,对距离时间向量进行划分,获得多个待识别窗口,每一待识别窗口中包括一个峰值点所关联的多个待测距离块;
28、对每一待识别窗口中的峰值点进行识别,获得每一待识别窗口中与峰值点关联性最强的待测距离块,记为最终距离块;
29、输出m个连续的最终距离块,以生成最终目标距离时间矩阵。
30、在一些实施例中,最终目标距离时间矩阵包括m个连续检测到的目标距离块,体现了下肢活动强度最大点与雷达之间的距离在m个帧内的变化情况;根据最终目标距离时间矩阵获得人体下肢的运动频率信息包括:
31、对最终距离块进行相位提取,获得初始相位信息;
32、对初始相位信息进行相位解缠,获得多个连续相位值;
33、对相邻的两个连续相位值进行减法运算,获得相位差信号;
34、采用滑动窗口对相位差信号进行多普勒fft运算,获得人体下肢的运动频率信息。
35、在一些实施例中,获取雷达反射信号还包括:
36、对待测区域发射雷达测量信号;
37、接收待测区域反馈的雷达反馈信号;
38、将雷达反馈信号与雷达测量信号混频和中频提取,生成雷达反射信号。
39、在一些实施例中,方法还包括:
40、获取调节指令,调节指令包括预设频率范围的调节差值;
41、根据调节指令对预设频率范围进行调节。
42、在第二方面,本发明还提供一种基于毫米波雷达的抖腿监测装置,包括桌板、毫米波雷达以及控制单元;毫米波雷达设置在桌板的底部,毫米波雷达朝向待测区域设置;控制单元与毫米波雷达电连接,控制单元用于执行第一方面所述的毫米波雷达的抖腿监测方法。
43、区别于现有技术,上述技术方案中,将毫米波雷达对应于待测区域设置,并对待测区域发出雷达测量信号,相应接收雷达反射信号,雷达反射信号包括待测区域的原始数据,对雷达反射信号进行预处理后提取人体下肢的运动频率信息,运动频率信息包括人体下肢的抖动频率和强度,判断抖动频率是否置于预设频率范围内,若是,则生成提示信息用于提示当前存在抖腿行为。本技术方案通过雷达采集人体下肢的活动状态,对雷达信号进行信号分析,提取出人体下肢的抖动频率,从而实现对用户的抖腿行为的判断和监测;本技术方案无需用户佩戴任何设备即可实现监测,具有更高的便捷性和用户体验,准确提取腿部运动频率,有效地识别抖腿行为和其他正常腿部活动,实现高准确度、非接触式的实时监测。
44、上述
技术实现要素:
相关记载仅是本发明技术方案的概述,为了让本领域普通技术人员能够更清楚地了解本发明的技术方案,进而可以依据说明书的文字及附图记载的内容予以实施,并且为了让本发明的上述目的及其它目的、特征和优点能够更易于理解,以下结合本发明的具体实施方式及附图进行说明。
- 还没有人留言评论。精彩留言会获得点赞!