UVW对位平台的视觉对位校准方法及相关装置与流程
本发明涉及图像处理领域,尤其涉及一种uvw对位平台的视觉对位校准方法及相关装置。
背景技术:
1、在制造业中,uvw对位平台是一种用于精确定位和校准目标工件的重要设备。然而,由于制造过程中各种因素的影响,如设备的机械变形、装配误差等,uvw对位平台在长时间运行后存在位置漂移或失准的问题。因此,为了确保制造过程的准确性和稳定性,需要对uvw对位平台进行定期的视觉对位校准。
2、现有对位校准方案,通常是由人工干预的方式,但这在大规模生产和高精度要求下不够高效,而且对位校准的准确率不高。
技术实现思路
1、本发明提供了一种uvw对位平台的视觉对位校准方法及相关装置,用于提高uvw对位平台的视觉对位校准准确率。
2、本发明第一方面提供了一种uvw对位平台的视觉对位校准方法,所述uvw对位平台的视觉对位校准方法包括:
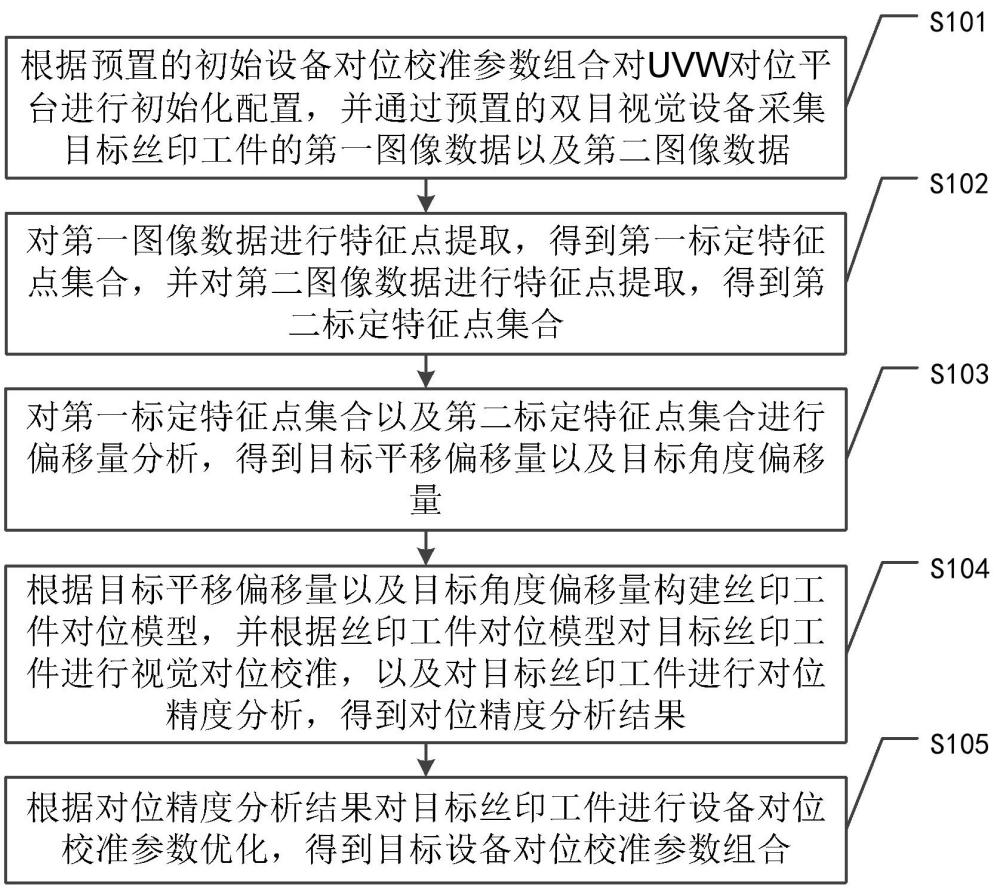
3、根据预置的初始设备对位校准参数组合对uvw对位平台进行初始化配置,并通过预置的双目视觉设备采集目标丝印工件的第一图像数据以及第二图像数据;
4、对所述第一图像数据进行特征点提取,得到第一标定特征点集合,并对所述第二图像数据进行特征点提取,得到第二标定特征点集合;
5、对所述第一标定特征点集合以及所述第二标定特征点集合进行偏移量分析,得到目标平移偏移量以及目标角度偏移量;
6、根据所述目标平移偏移量以及所述目标角度偏移量构建丝印工件对位模型,并根据所述丝印工件对位模型对所述目标丝印工件进行视觉对位校准,以及对所述目标丝印工件进行对位精度分析,得到对位精度分析结果;
7、根据所述对位精度分析结果对所述目标丝印工件进行设备对位校准参数优化,得到目标设备对位校准参数组合。
8、结合第一方面,在本发明第一方面的第一种实现方式中,所述根据预置的初始设备对位校准参数组合对uvw对位平台进行初始化配置,并通过预置的双目视觉设备采集目标丝印工件的第一图像数据以及第二图像数据,包括:
9、获取预置的初始设备对位校准参数组合,并根据所述初始设备对位校准参数组合对uvw对位平台进行初始化配置;
10、对预置的双目视觉设备进行系统相机参数标定,并通过参数标定后的双目视觉设备采集目标丝印工件的原始图像数据;
11、对所述原始图像数据进行灰度化处理,得到灰度图像数据,并对所述灰度图像数据进行图像分类,得到第一图像数据以及第二图像数据。
12、结合第一方面,在本发明第一方面的第二种实现方式中,所述对所述第一图像数据进行特征点提取,得到第一标定特征点集合,并对所述第二图像数据进行特征点提取,得到第二标定特征点集合,包括:
13、通过预置的边缘检测算法对所述第一图像数据进行靶标特征检测,得到第一靶标边缘特征集合,以及通过所述边缘检测算法对所述第二图像数据进行靶标特征检测,得到第二靶标边缘特征集合;
14、根据所述第一靶标边缘特征集合,对所述第一图像数据进行靶标识别,得到第一目标靶标和第二目标靶标,以及根据所述第二靶标边缘特征集合,对所述第二图像数据进行靶标识别,得到第三目标靶标和第四目标靶标;
15、分别对所述第一目标靶标、所述第二目标靶标、所述第三目标靶标和所述第四目标靶标进行靶标轮廓中心坐标提取,得到对应的第一靶标轮廓中心坐标a(xm1,ym1)、第二靶标轮廓中心坐标b(xf1,yf1)、第三靶标轮廓中心坐标c(xm2,ym2)以及第四靶标轮廓中心坐标d(xf2,yf2);
16、根据所述第一靶标轮廓中心坐标a(xm1,ym1)和所述第三靶标轮廓中心坐标c(xm2,ym2)构建第一标定线段ac,并根据所述第二靶标轮廓中心坐标b(xf1,yf1)和所述第四靶标轮廓中心坐标d(xf2,yf2)构建第二标定线段bd;
17、获取所述第一标定线段ac的第一标定中点g1((xm1+xm2)/2,(ym1+ym2)/2),以及获取所述第二标定线段bd的第二标定中点g2((xf1+xf2)/2,(yf1+yf2)/2);
18、根据所述第一靶标轮廓中心坐标、所述第二靶标轮廓中心坐标以及所述第一标定中点生成第一靶标边缘特征集合,以及根据所述第三靶标轮廓中心坐标、所述第四靶标轮廓中心坐标以及所述第二标定中点生成第二靶标边缘特征集合。
19、结合第一方面,在本发明第一方面的第三种实现方式中,所述对所述第一标定特征点集合以及所述第二标定特征点集合进行偏移量分析,得到目标平移偏移量以及目标角度偏移量,包括:
20、对所述第一标定特征点集合以及所述第二标定特征点集合进行透射变换,得到坐标透射变换关系;
21、根据所述坐标透射变换关系,对所述第一标定特征点集合以及所述第二标定特征点集合进行横向平移偏移量计算,得到横向平移偏移量,并对所述第一标定特征点集合以及所述第二标定特征点集合进行纵向平移偏移量计算,得到纵向平移偏移量;
22、根据所述横向平移偏移量以及所述纵向平移偏移量生成对应的目标平移偏移量;
23、对所述第一靶标轮廓中心坐标a(xm1,ym1)、所述第二靶标轮廓中心坐标b(xf1,yf1)、所述第三靶标轮廓中心坐标c(xm2,ym2)以及所述第四靶标轮廓中心坐标d(xf2,yf2)进行角度偏移量计算,得到目标角度偏移量。
24、结合第一方面,在本发明第一方面的第四种实现方式中,所述根据所述目标平移偏移量以及所述目标角度偏移量构建丝印工件对位模型,并根据所述丝印工件对位模型对所述目标丝印工件进行视觉对位校准,以及对所述目标丝印工件进行对位精度分析,得到对位精度分析结果,包括:
25、根据所述目标平移偏移量以及所述目标角度偏移量构建丝印工件对位模型;
26、根据所述丝印工件对位模型,对所述目标丝印工件的第一标定中点g1((xm1+xm2)/2,(ym1+ym2)/2)以及所述第二标定中点g2((xf1+xf2)/2,(yf1+yf2)/2)进行居中对位;
27、对所述第一标定中点g1((xm1+xm2)/2,(ym1+ym2)/2)以及所述第二标定中点g2((xf1+xf2)/2,(yf1+yf2)/2)进行居中精度计算,得到目标居中精度;
28、分别对所述第一目标靶标、所述第二目标靶标、所述第三目标靶标和所述第四目标靶标进行中心误差计算,得到第一靶标中心误差d1、第二靶标中心误差d2、第三靶标中心误差d3以及第四靶标中心误差d4;
29、根据所述第一靶标中心误差d1、所述第二靶标中心误差d2、所述第三靶标中心误差d3以及所述第四靶标中心误差d4,判断所述目标丝印工件是否符合预设精度标准,得到对位精度判断结果。
30、结合第一方面,在本发明第一方面的第五种实现方式中,所述根据所述对位精度分析结果对所述目标丝印工件进行设备对位校准参数优化,得到目标设备对位校准参数组合,包括:
31、根据所述对位精度分析结果,通过预置的遗传算法对所述目标丝印工件进行对位校准参数群体初始化,得到多个第一设备对位校准参数组合;
32、分别计算每个第一设备对位校准参数组合的第一适应度数据;
33、根据所述第一适应度数据对所述多个第一设备对位校准参数组合进行群体划分,得到第一设备对位校准参数组合群体、第二设备对位校准参数组合群体以及第三对位参数组合群体;
34、对所述第一设备对位校准参数组合群体和所述第二设备对位校准参数组合群体进行繁殖、交叉和变异,并对所述第三对位参数组合群体进行交叉和变异,得到多个第二设备对位校准参数组合;
35、分别计算每个第二设备对位校准参数组合的第二适应度数据,并根据所述第二适应度数据对所述多个第二设备对位校准参数组合进行对位校准参数最优化分析,得到目标设备对位校准参数组合。
36、结合第一方面,在本发明第一方面的第六种实现方式中,所述根据所述第一适应度数据对所述多个第一设备对位校准参数组合进行群体划分,得到第一设备对位校准参数组合群体、第二设备对位校准参数组合群体以及第三对位参数组合群体,包括:
37、对所述第一适应度数据与第一适应度阈值和第二适应度阈值进行比较,其中,第一适应度阈值<第二适应度阈值;
38、若第一适应度数据<第一适应度阈值,则将对应的第一设备对位校准参数组合划分至第一设备对位校准参数组合群体,若第一适应度阈值<第一适应度数据<第二适应度阈值,则将对应的第一设备对位校准参数组合划分至第二设备对位校准参数组合群体,若第二适应度阈值<第一适应度数据,则将对应的第一设备对位校准参数组合划分至第三设备对位校准参数组合群体。
39、本发明第二方面提供了一种uvw对位平台的视觉对位校准装置,所述uvw对位平台的视觉对位校准装置包括:
40、采集模块,用于根据预置的初始设备对位校准参数组合对uvw对位平台进行初始化配置,并通过预置的双目视觉设备采集目标丝印工件的第一图像数据以及第二图像数据;
41、提取模块,用于对所述第一图像数据进行特征点提取,得到第一标定特征点集合,并对所述第二图像数据进行特征点提取,得到第二标定特征点集合;
42、分析模块,用于对所述第一标定特征点集合以及所述第二标定特征点集合进行偏移量分析,得到目标平移偏移量以及目标角度偏移量;
43、对位校准模块,用于根据所述目标平移偏移量以及所述目标角度偏移量构建丝印工件对位模型,并根据所述丝印工件对位模型对所述目标丝印工件进行视觉对位校准,以及对所述目标丝印工件进行对位精度分析,得到对位精度分析结果;
44、优化模块,用于根据所述对位精度分析结果对所述目标丝印工件进行设备对位校准参数优化,得到目标设备对位校准参数组合。
45、本发明第三方面提供了一种uvw对位平台的视觉对位校准设备,包括:存储器和至少一个处理器,所述存储器中存储有指令;所述至少一个处理器调用所述存储器中的所述指令,以使得所述uvw对位平台的视觉对位校准设备执行上述的uvw对位平台的视觉对位校准方法。
46、本发明的第四方面提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机执行上述的uvw对位平台的视觉对位校准方法。
47、本发明提供的技术方案中,根据初始设备对位校准参数组合对uvw对位平台进行初始化配置,并采集目标丝印工件的第一图像数据以及第二图像数据;进行特征点提取,得到第一标定特征点集合和第二标定特征点集合;进行偏移量分析,得到目标平移偏移量以及目标角度偏移量;构建丝印工件对位模型,并根据丝印工件对位模型对目标丝印工件进行视觉对位校准,以及对目标丝印工件进行对位精度分析,得到对位精度分析结果;根据对位精度分析结果对目标丝印工件进行设备对位校准参数优化,得到目标设备对位校准参数组合,本发明通过特征点提取和偏移量分析,能够实现对目标丝印工件的高精度对位校准。通过构建丝印工件对位模型,实现了更准确的视觉对位。采用了预置的双目视觉设备和自动化的特征点提取算法,使得对位校准过程更为自动化,减少了人为干预,提高了校准的效率和可靠性。通过对位精度分析结果进行校准参数优化,采用了预置的遗传算法,对多个设备对位校准参数进行多层次的优化,进一步提升了校准的准确性。采用了边缘检测算法和靶标特征检测,使其对不同类型的丝印工件具有较好的适应性,采用了实时数据采集和自动处理算法,具有较好的实时性和稳定性,适用于生产线上对位校准的实际需求。通过自动化和高精度的对位校准,有助于提高生产线上的工作效率,减少了因对位不准确而导致的生产中断和次品率,进而提高了uvw对位平台的视觉对位校准准确率。
- 还没有人留言评论。精彩留言会获得点赞!