一种灌注桩干成孔的质量检测装置及方法与流程
本发明涉及岩土工程桩基检测,特别是涉及一种灌注桩干成孔的质量检测装置及方法。
背景技术:
1、灌注桩是最广泛应用的桩基类型之一,灌注桩的施工分为成孔和成桩两个环节,成孔过程中可能存在塌孔、缩孔、偏斜等质量问题。灌注桩的成孔质量影响到灌注桩成桩质量,因此,在灌注桩成孔后,灌注混凝土前需要针对灌注桩成孔进行质量检测。但是,针对灌注桩干成孔的质量检测,检测难度较大,尚无有效的检测手段。
2、因此,亟需开发一种灌注桩干成孔的质量检测装置及方法。
技术实现思路
1、本发明的目的是提供一种灌注桩干成孔的质量检测装置及方法。
2、为解决上述技术问题,作为本发明的一个方面,提供了一种灌注桩干成孔的质量检测装置,包括:检测主机、探头、线架、电缆线和深度计数滑轮;所述探头,包括:调频液体阻尼器、激光测距仪、加速度计和陀螺仪;其中,
3、所述线架,用于设置在待进行质量检测的灌注桩干成孔的孔口处;
4、所述深度计数滑轮,设置在所述线架上,用于在所述探头自所述灌注桩干成孔中下降的过程中,获取所述探头在所述灌注桩干成孔中的孔深;
5、所述深度计数滑轮的电缆线与所述探头铰接;所述激光测距仪的数量为四个;所述调频液体阻尼器、所述加速度计、所述陀螺仪、以及四个所述激光测距仪,集成设置。
6、其中,在所述探头自所述灌注桩干成孔中下方的过程中,四个所述激光测距仪,用于获取所述探头的不同方位上与所述灌注桩干成孔的孔壁的距离;所述加速度计,用于获取所述探头的加速度数据;所述陀螺仪,用于获取陀螺仪数据;
7、所述检测主机,分别与所述深度计数滑轮和所述探头相连,用于基于所述探头在所述灌注桩干成孔中的孔深,根据所述探头的不同方位上与所述灌注桩干成孔的孔壁的距离、以及所述探头的加速度数据计算所述孔深处所述灌注桩干成孔的垂直度,根据所述陀螺仪数据计算所述孔深处所述灌注桩干成孔的孔径,以实现对所述灌注桩干成孔的不同孔深处的垂直度和孔径的检测,即实现对所述灌注桩干成孔的质量检测。
8、根据本发明一示例实施方式,在所述探头中,在所述探头竖直放置的情况下,所述调频液体阻尼器位于底部,所述加速度计和所述陀螺仪位于顶部,四个所述激光测距仪位于中部、且呈十字型分布。
9、作为本发明的第二个方面,本发明提供一种灌注桩干成孔的质量检测方法,包括:采用以上所述的灌注桩干成孔的质量检测装置对待进行质量检测的灌注桩干成孔进行质量检测,具体如下:
10、通过所述灌注桩干成孔的质量检测装置中的检测主机,获取待进行质量检测的灌注桩干成孔的设计孔深、不同孔深下的设计垂直度和设计孔径、以及所述探头下方的设定步距;
11、通过所述线架和电缆线,使所述探头置于所述灌注桩干成孔的孔口中心位置处,并使所述探头自所述灌注桩干成孔的孔口中心位置处按所述设定步距向所述灌注桩干成孔中下降;
12、在所述探头自所述灌注桩干成孔的孔口中心位置处向所述灌注桩干成孔中下降的过程中,获取所述深度计数滑轮在所述探头下降的过程中的转动圈数,并使所述检测主机根据该转动圈数计算所述探头所在位置处的孔深;
13、在所述探头下降到当前孔深的情况下,使所述检测主机,获取四个所述激光测距仪检测到的所述探头的不同方位上与所述灌注桩干成孔的孔壁的距离,获取所述加速度计检测到的取所述探头的加速度数据,并获取所述陀螺仪检测到的陀螺仪数据;
14、使所述检测主机,根据所述探头的不同方位上与所述灌注桩干成孔的孔壁的距离、以及所述探头的加速度数据计算所述当前孔深处所述灌注桩干成孔的垂直度,根据所述陀螺仪数据计算所述当前孔深处所述灌注桩干成孔的孔径;
15、使所述检测主机,将所述当前孔深处所述灌注桩干成孔的垂直度与所述当前下降深度处的垂直度进行对比,并将所述当前孔深处所述灌注桩干成孔的孔径与所述当前孔深处所述灌注桩干成孔的设计孔径进行对比,以实现对所述灌注桩干成孔在所述当前下降深度处的垂直度和孔径的质量检测。
16、根据本发明一示例实施方式,根据所述探头的不同方位上与所述灌注桩干成孔的孔壁的距离、以及所述探头的加速度数据计算所述当前孔深处所述灌注桩干成孔的垂直度,包括:
17、根据所述探头的不同方位上与所述灌注桩干成孔的孔壁的距离,计算所述探头的初始偏心距;
18、根据所述探头的加速度数据,经过捷联惯导速度和位置解算,得到所述探头的额外偏心距;
19、根据所述探头的初始偏心距、所述探头的额外偏心距、以及所述当前孔深,计算所述当前孔深处所述灌注桩干成孔的垂直度。
20、根据本发明一示例实施方式,根据所述探头的不同方位上与所述灌注桩干成孔的孔壁的距离,计算所述探头的初始偏心距,包括:
21、按下式计算所述探头的初始偏心距:
22、;
23、其中,l1、l2、l3和l4为所述探头在前后左右四个方向上与所述灌注桩干成孔的孔壁的距离,为所述探头(2)的初始偏心距。
24、根据本发明一示例实施方式,根据所述探头的初始偏心距、所述探头的额外偏心距、以及所述当前孔深,计算所述当前孔深处所述灌注桩干成孔的垂直度,包括:
25、按下式计算所述灌注桩干成孔的垂直度:
26、;
27、其中,为所述探头(2)的偏心距,为所述探头(2)的初始偏心距,为所述探头(2)的额外偏心距,为所述探头当前所在的深度,为所述灌注桩干成孔在深度的垂直度。
28、根据本发明一示例实施方式,根据陀螺仪数据计算所述当前孔深处所述灌注桩干成孔的孔径,包括:
29、根据所述陀螺仪数据,经捷联惯导的姿态解算,得到所述探头的姿态角;并根据所述探头的姿态角,对所述探头在前后左右四个方向上与所述灌注桩干成孔的孔壁的距离进行修正,得到所述探头在前后左右四个方向上与所述灌注桩干成孔的孔壁的距离的修正值;
30、根据所述灌注桩干成孔的孔壁的距离的修正值,计算得到所述当前孔深处所述灌注桩干成孔的孔径。
31、根据本发明一示例实施方式,根据所述探头的姿态角,对所述探头在前后左右四个方向上与所述灌注桩干成孔的孔壁的距离进行修正,得到所述探头在前后左右四个方向上与所述灌注桩干成孔的孔壁的距离的修正值,包括:
32、按下式计算所述探头在前后左右四个方向上与所述灌注桩干成孔的孔壁的距离的修正值:
33、;
34、;
35、;
36、;
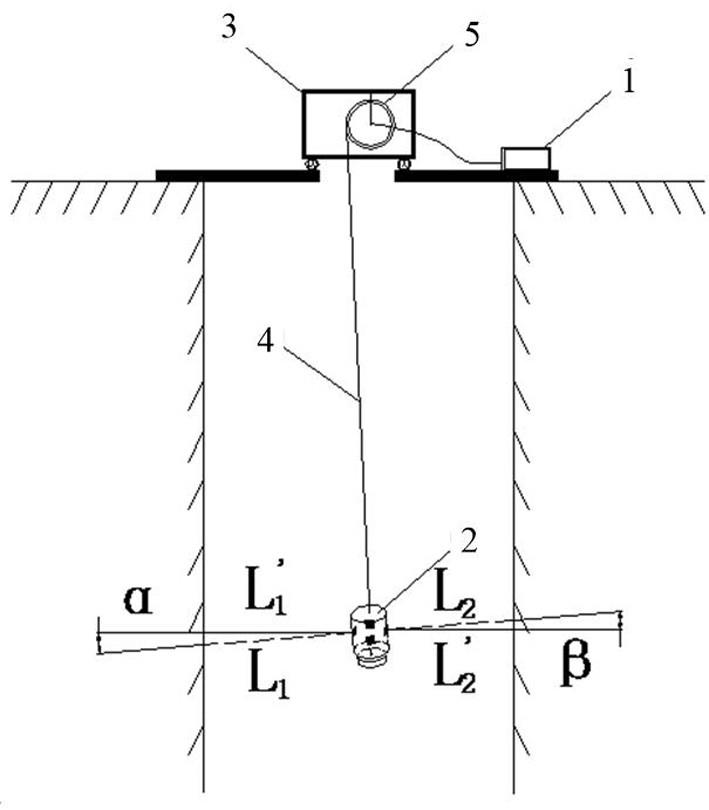
37、其中,l1、l2、l3和l4为所述探头在前后左右四个方向上与所述灌注桩干成孔的孔壁的距离,α、β、γ、δ为所述探头在前后左右四个方向上的姿态角,l1’、l2’、l3’、l4’为所述探头在前后左右四个方向上与所述灌注桩干成孔的孔壁的距离的修正值。
38、根据本发明一示例实施方式,根据所述灌注桩干成孔的孔壁的距离的修正值,计算得到所述当前孔深处所述灌注桩干成孔的孔径,包括:
39、按下式计算得到所述当前孔深处所述灌注桩干成孔的孔径:
40、;
41、其中,l1’、l2’、l3’、l4’为所述探头在前后左右四个方向上与所述灌注桩干成孔的孔壁的距离的修正值,di为所述当前孔深处所述灌注桩干成孔的孔径。
42、根据本发明一示例实施方式,还包括:在实现对所述灌注桩干成孔在所述当前下降深度处的垂直度和孔径的质量检测之后,使所述探头自所述灌注桩干成孔的孔口中心位置处按所述设定步距向所述灌注桩干成孔中继续下降;
43、在所述探头自所述灌注桩干成孔的孔口中心位置处向所述灌注桩干成孔中继续下降的过程中,获取所述深度计数滑轮在所述探头下降的过程中的转动圈数,并使所述检测主机根据该转动圈数计算所述探头所在位置处的孔深;
44、在所述探头下降到下一个孔深的情况下,使所述检测主机,获取四个所述激光测距仪检测到的所述探头的不同方位上与所述灌注桩干成孔的孔壁的距离,获取所述加速度计检测到的取所述探头的加速度数据,并获取所述陀螺仪检测到的陀螺仪数据;
45、使所述检测主机,根据所述探头的不同方位上与所述灌注桩干成孔的孔壁的距离、以及所述探头的加速度数据计算所述下一个孔深处所述灌注桩干成孔的垂直度,根据所述陀螺仪数据计算所述当前孔深处所述灌注桩干成孔的孔径;
46、使所述检测主机,将所述下一个孔深处所述灌注桩干成孔的垂直度与所述下一个孔深处所述灌注桩干成孔的设计垂直度进行对比,并将所述下一个孔深处所述灌注桩干成孔的孔径与所述下一个孔深处所述灌注桩干成孔的设计孔径进行对比,以实现对所述灌注桩干成孔在所述下一个孔深处的垂直度和孔径的质量检测;
47、以此循环,直至实现对所述灌注桩干成孔在最后孔深处的垂直度和孔径的质量检测,以此,实现对所述灌注桩干成孔的所有孔深处的垂直度和孔径的检测,即实现对所述灌注桩干成孔的质量检测;所述最后孔深处,包含所述灌注桩干成孔的底部处。
48、本发明的有益效果是:针对灌注桩干成孔的质量检测,通过设置由检测主机1、探头2、线架3、电缆线(即导线4)、深度计数滑轮5构成的灌注桩干成孔的质量检测装置,其中探头2是调频液体阻尼器、加速度计、陀螺仪、以及四个激光测距仪集成设置得到;利用该灌注桩干成孔的质量检测装置对待测干成孔进行质量检测,在检测过程中抑制探头2的摆动和扭转,并实时监测探头2的轨迹和姿态,可实现对待测干成孔的孔深、孔径、垂直度等参数进行检测,大大减小了针对灌注桩干成孔的质量检测的检测难度,提升了针对灌注桩干成孔的质量检测的检测便捷性和检测结果的精准性。
- 还没有人留言评论。精彩留言会获得点赞!