一种自动调节碰撞点的VRU测试方法、设备及存储介质与流程
本发明涉及自动驾驶测试领域,尤其涉及一种自动调节碰撞点的vru测试方法、设备及存储介质。
背景技术:
1、对于车辆的aeb(automatic emergency braking,自动紧急刹车系统)功能进行性能测试时,测试评价包括:vru(vulnerable road user,弱势道路使用者)测试,vru包括:成年行人、小孩、自行车、电动踏板车和摩托车等,vru性能测试结果所反映的是测试车辆对弱势道路使用者所造成的碰撞伤害程度,对车辆的vru性能进行测试时,通过模拟工况进行测试,工况包括模拟行人从近端横穿、模拟行人从远端横穿等,在不同的工况下车辆以一定速度行驶,根据车辆的行驶结果对vru性能进行评价。
2、相关技术中,当前的vru测试设备大多参照abdynamic公司的设备,其采用的vru性能测试方法主要包括三个步骤,第一步,为测试车装配用于车辆vru性能测试的测试设备,以及为vru装配用于控制vru运动的控制设备;第二步,准备或设置测试工况,规划测试车的行驶路径和vru的运动路径,行驶路径和运动路径存在交叉点,即为碰撞点;第三步,测试车以指定匀速速度在行驶路径上行驶,vru在另一运动路径上运动,aeb运行,测试车与vru发生碰撞或刹停,记录测试车的测试数据,例如车辆是否发生碰撞,碰撞时的速度,刹停时测试车与目标物之间的距离等,通过对测试数据进行分析,从而实现对测试车的vru性能的测试评价。
3、但是,该vru测试设备的vru先加速后匀速,在加速结束后的速度为固定速度,在vru匀速运动期间,若测试车辆的速度不再匀速或测试车辆的横向位置产生偏差时,vru并不会跟随测试车辆进行自适应调节碰撞点,使得碰撞点不再准确,影响测试效果;因此在vru性能测试过程中,对测试车辆的速度、横向位置偏差要求非常高。
技术实现思路
1、本发明针对现有技术中存在的技术问题,提供一种自动调节碰撞点的vru测试方法、设备及存储介质,解决vru测试对目标车辆的速度、横向位置偏差要求要求高的问题。
2、根据本发明的第一方面,一种自动调节碰撞点的vru测试方法,所述vru测试方法包括:
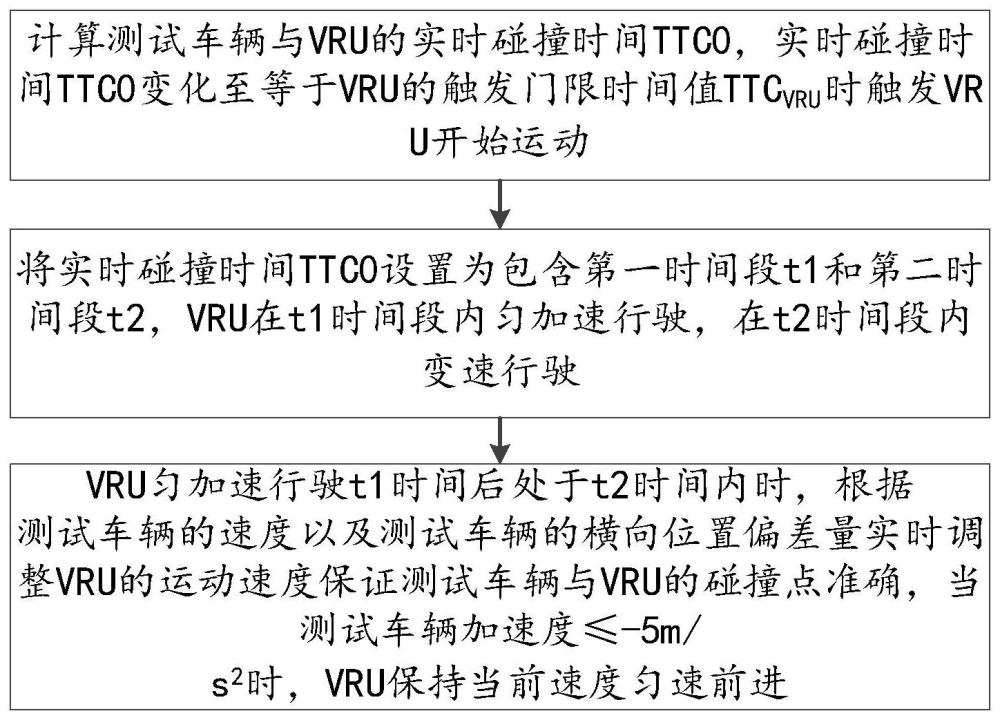
3、获取目标车辆与vru的实时碰撞时间ttc0,所述实时碰撞时间ttc0变化至等于所述vru的触发门限时间值ttcvru时触发所述vru开始运动;
4、将所述实时碰撞时间ttc0设置为包含第一时间段t1和第二时间段t2,所述vru在t1时间段内匀加速行驶,在t2时间段内变速行驶;
5、所述vru匀加速行驶t1时间后处于t2时间内时,根据所述目标车辆的速度或目标车辆的横向位置偏差量实时调整所述vru的运动速度保证所述目标车辆与所述vru的碰撞点准确;在t2时间段内,当目标车辆加速度小于等于-5m/s2时,vru保持当前速度匀速前进。
6、在上述技术方案的基础上,所述获取目标车辆与vru的实时碰撞时间ttc0之前,还包括:
7、在所述目标车辆上安装定位模块和通讯模块,通过所述定位模块确定所述目标车辆的实时位置,并根据实时位置的变化获取当前速度和加速度,通过所述通讯模块将所述目标车辆的实时位置和当前速度、加速度发送给vru上位机。
8、在上述技术方案的基础上,所述获取目标车辆与vru的实时碰撞时间ttc0,包括:
9、根据目标车辆与所述vru的实时纵向距离s0和目标车辆当前速度v0获取实时碰撞时间ttc0。
10、在上述技术方案的基础上,所述触发门限时间值ttcvru事先设定,设定方法包括:
11、设置所述vru进行匀加速运动的第一时间段t1'的第一目标行驶距离和目标速度,获取所述vru在行驶距离为所述第一目标行驶距离且车速由0匀加速至所述目标速度的行驶时间为t1';
12、设置所述vru进行匀速运动的第二时间段t2'的第二目标行驶距离,获取所述vru在行驶距离为所述第二目标行驶距离且车速为所述目标速度的行驶时间为t2';
13、其中,ttcvru=t1'+t2'。
14、在上述技术方案的基础上,所述vru加速行驶t1时间后处于t2时间段内,且所述目标车辆速度和横向偏差均稳定在设定范围内时,获取并实时调整所述vru的运动速度,当目标车辆加速度小于等于-5m/s2时,vru保持当前速度匀速前进。
15、在上述技术方案的基础上,所述根据所述目标车辆的速度以及目标车辆的横向位置偏差量实时调整所述vru的运动速度保证所述目标车辆与所述vru的碰撞点准确,包含:
16、车辆不匀速情形,目标车辆速度变化时vru的运动速度变化计算公式为:
17、根据获取实时ttc1,再根据获取需要的vru的运动速度;
18、其中,s1为车辆与碰撞点的当前距离;v为所述车辆运动速度;δv为所述车辆的速度变化量;x1为vru距离碰撞点的当前距离,vvru1为目标车辆速度变化后所需的vru运动速度;
19、当目标车辆的加速度小于等于-5m/s2时,可认为是目标车辆的自动紧急制动系统aeb介入,此时vru以当前速度保持匀速运动,不再跟据目标车辆的速度变化自动调整碰撞点;
20、车辆横向偏移情形,目标车辆的横向位置变化计算公式为:
21、获取所需要的vru的实时速度;
22、其中,x2为所述vru与初始碰撞点的横向距离;δx为目标车辆的横向位置偏差量;ttc2是所述目标车辆到达碰撞点所需的时间。
23、第二方面,本技术公开了一种自动调节碰撞点的vru测试设备,包括:vru上位机以及安装在目标车辆上的定位模块和通讯模块;
24、所述定位模块用于确定所述目标车辆的实时位置、当前速度和加速度;
25、所述通讯模块用于将所述目标车辆的实时位置、当前速度和加速度发送给所述vru上位机;
26、所述vru上位机获取目标车辆与vru的实时碰撞时间ttc0,所述实时碰撞时间ttc0变化至等于所述vru的触发门限时间值ttcvru时触发所述vru开始运动;将所述vru的实时碰撞时间ttc0设置为包含第一时间段t1和第二时间段t2,所述vru在t1时间段内匀加速行驶,在t2时间段内变速行驶;所述vru匀加速行驶t1时间后处于t2时间内时,根据所述目标车辆的速度以及目标车辆的横向位置偏差量实时调整所述vru的运动速度保证所述目标车辆与所述vru的碰撞点准确,在t2时间段内,当目标车辆加速度小于等于-5m/s2时,vru保持当前速度匀速前进。
27、在上述技术方案的基础上,所述实时碰撞时间ttc0根据目标车辆与所述vru的实时纵向距离s0和目标车辆当前速度v0得到。
28、第三方面,本技术公开了一种电子设备,包括存储器、处理器,所述处理器用于执行存储器中存储的计算机管理类程序时实现上述的自动调节碰撞点的vru测试方法的步骤。
29、第四方面本技术公开了一种计算机可读存储介质,其上存储有计算机管理类程序,所述计算机管理类程序被处理器执行时实现上述的自动调节碰撞点的vru测试方法的步骤。
30、本技术实施例提供的技术方案带来的有益效果至少包括:
31、本发明实施例提供的一种自动调节碰撞点的vru测试方法、系统、电子设备及存储介质,以目标车辆与vru的碰撞时间作为vru触发条件,并将vru的预设触发时间设置为两个时间段:匀加速行驶时间段和变速行驶时间段,vru在变速行驶时间段内,根据目标车辆与碰撞点的碰撞时间以及目标车辆的横向位置偏差量实时调整vru的运动速度,即当目标车辆速度和横向位置偏差一定范围内时vru能自适应调节vru的运动速度以保证碰撞点准确;测试过程中不依赖转向、制动、油门机器人即可保证碰撞点准确,有效节省了测试成本;减少转向、制动、油门机器人的安装、调试时间,提高了测试效率;减少了转向、制动、油门机器人对场地的限制,即在较短的加速场地内也能完成测试。
- 还没有人留言评论。精彩留言会获得点赞!