一种蛟龙号深潜器搭载的深海水体与岩芯自动取样装置的制作方法
本发明涉及一种蛟龙号深潜器搭载的深海水体与岩芯自动取样装置。
背景技术:
1、深海取样装置主要包括深海水体取样装置和深海岩芯取样装置,其在海洋科学研究、海底矿产勘探和海洋地质探测中发挥着重要作用。深海水体取样主要通过蛟龙号深潜器携带的深海水体采样器实现对目标水域水体的采样,深海岩芯取样通常基于深海取样装置钻取海底岩石的方式获取深海岩芯。长期以来,蛟龙号深潜器为了满足不同的作业需求,需要搭载多种深海取样装置。由于蛟龙号深潜器搭载能力有限,搭载额外取样装置极大地限制了蛟龙号深潜器的作业能力。传统深海岩芯取样装置一般采用内置的电机或液压马达驱动采样钻头钻取岩芯样品。蛟龙号搭载的岩芯取样装置通常依靠深海液压机械臂的夹持实现对目标岩芯的采样。在岩芯取样作业过程中,蛟龙号深潜器通过操纵深海液压机械臂,调整岩芯取样装置的姿态和位置,应用过程复杂且钻进切深难以控制。此外,传统深海岩芯取样装置功能单一,不具备对周围水体的采样能力。蛟龙号深潜器进行水体采样时需要搭载额外的水体采样器,占用蛟龙号深潜器资源,制约蛟龙号深潜器的作业效率。
技术实现思路
1、为解决以上技术上的不足,本发明提供了一种蛟龙号深潜器搭载的深海水体与岩芯自动取样装置,可实现对采样深度的控制,同时具备采集周围水体的功能。
2、本发明是通过以下措施实现的:
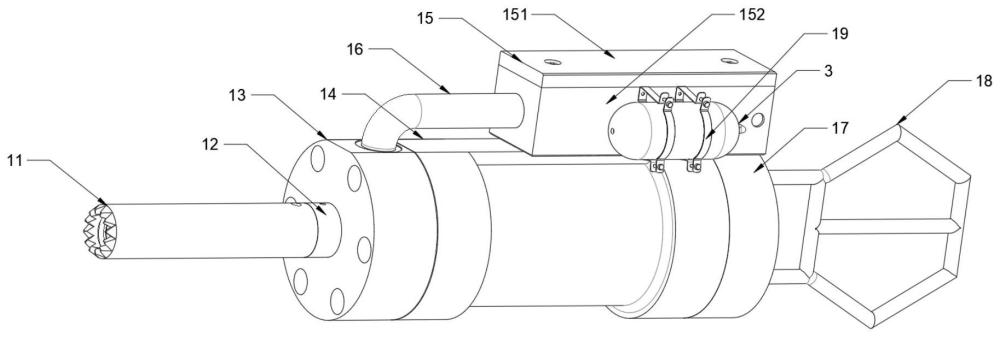
3、一种蛟龙号深潜器搭载的深海水体与岩芯自动取样装置,包括内部设置有空腔的圆柱形缸体,所述缸体内壁上设置有传动螺纹,缸体内设置有可沿缸体左右移动且在左右移动的同时沿螺纹旋转的活塞,所述活塞左侧连接有活塞杆,所述活塞杆左端连接有钻头,位于活塞左侧的腔室和位于活塞右侧的腔室分别连接有用于交替供给两个腔室高压液体或高压气体以推动活塞移动的管路,所述管路上设置有用以切换管路通断的阀组,所述缸体连接有密封的保护壳,所述阀组设置在保护壳内。
4、上述阀组包括三位四通电磁换向阀和叠加型双单向节流阀,所述三位四通电磁换向阀设置有p口、t口、a口、b口,该换向阀处于中位时p口处于断开状态,a口、b口和t口处于导通状态;该换向阀处于左位时a口与p口处于导通状态,b口与t口处于导通状态;该换向阀处于右位时a口与t口处于导通状态,b口与p口处于导通状态;所述叠加型双单向节流阀设置有a口、b口、c口、d口,其中a口、b口之间设置有并联的单向阀和节流阀,c口、d口之间设置有并联的单向阀和节流阀,所述p口通过管路连接蛟龙号高压油源,t口连接蛟龙号油箱,a口与a口连接,b口与c口连接,b口通过管路与活塞左侧的腔室连接,d口通过管路与活塞右侧的腔室连接,所述保护壳连接有压力自适应装置,所述压力自适应装置为固定在保护壳上的弹簧式蓄能器。
5、上述弹簧式蓄能器包括罐体,所述罐体内设置有弹簧和可以进行滑动的隔板,所述隔板将罐体内空腔分隔成两个密封的腔室,其中一个腔室内充有液压油,并且该腔室通过管路与保护壳相连通,另一个腔室开有海水流通口。
6、上述阀组包括两位二通电磁阀、截止阀和节流阀,两位二通电磁换向阀设置有i口、y口,该换向阀处于左位时,其i口与y口处于连通状态;处于右位时其i口与y口处于断开状态;截止阀设置有k口和x口,节流阀设置有h口和j口,所述i口通过管路与活塞右侧的腔室连接,y口与阀组外部连通,所述保护壳上固定有高压气瓶,所述高压气瓶的z口分别与j口和k口连接,h口通过管路与活塞左侧的腔室连接,x口阀组外部连通。
7、上述缸体内壁上设置有大螺旋升角的内螺纹,活塞的外圆周面设置有大螺旋升角且与缸体内螺纹相啮合的外螺纹,所述活塞右侧固定有预紧螺母,所述活塞杆右端贯穿活塞并与预紧螺母连接,预紧螺母侧面设置有销孔,销钉贯穿预紧螺母和活塞杆,缸体左端端面密封连接有左端盖,缸体右端端面密封连接有右端盖,所述活塞杆密封滑动穿出左端盖,所述左端盖与活塞左侧之间为腔室ⅰ,并且左端盖上设置有连通腔室ⅰ和b口的高压管道,所述右端盖与活塞右侧之间为腔室ⅱ,且当活塞移动至最右端时预紧螺母紧贴右端盖的左端面,右端盖上设置有连通腔室ⅱ和d口的管道。
8、上述钻头为空心圆柱体结构,钻头左端端面边沿设置有倾斜的锯齿状结构,钻头的内壁上设置有内螺纹,钻头底部设置有用以平衡压力的泄压孔。
9、上述右端盖的右侧连接有液压机械臂把手,所述液压机械臂把手为六边形内加横梁的绗架结构,液压机械臂把手底部设置有用于与右端盖连接的盘型底座。
10、本发明的有益效果是:1.本发明基于深海取样装置内部的螺旋传动机构,可以实现钻头前进的同时不断旋转,深海取样装置采样过程不依赖液压机械臂的辅助推进作用,从而降低蛟龙号深潜器的采样难度,提高其作业精度。2.本发明设计了具备不同功能的可更换式阀组。在方案一中,阀组集成了叠加型双单向节流阀与三位四通电磁换向阀,通过改变电磁换向阀阀芯位置,将蛟龙号高压油源引入深海取样装置内部,实现其对深海岩芯的采样。3.本发明设计了压力自适应系统,将弹簧式蓄能器与阀组保护壳体连通,在深潜器下潜与上浮的过程中,通过将外界海水引入弹簧式蓄能器,实现阀组保护壳内部压力与外部压力的平衡。4.在方案二中,阀组内部设置有两位二通电磁阀、节流阀、截止阀和高压气瓶,当需要深海取样装置进行采样时,切换两位二通电磁阀至导通状态,此时深海取样装置与外界海水连通,在外界高压海水的作用下,实现深海取样装置的岩芯采样;同时,在深海取样装置钻取岩芯样本的过程中可以同步实现对周围水体的采样。5.深海取样装置不需要深潜器提供额外的驱动油源,蛟龙号可以搭载多组深海取样装置实现在更广海域的采样作业,提高其作业效率。
技术特征:
1.一种蛟龙号深潜器搭载的深海水体与岩芯自动取样装置,其特征在于:包括内部设置有空腔的圆柱形缸体,所述缸体内壁上设置有传动螺纹,缸体内设置有可沿缸体左右移动且在左右移动的同时沿螺纹旋转的活塞,所述活塞左侧连接有活塞杆,所述活塞杆左端连接有钻头,位于活塞左侧的腔室和位于活塞右侧的腔室分别连接有用于交替供给两个腔室高压液体或高压气体以推动活塞移动的管路,所述管路上设置有用以切换管路通断的阀组,所述缸体连接有密封的保护壳,所述阀组设置在保护壳内。
2.根据权利要求1所述蛟龙号深潜器搭载的深海水体与岩芯自动取样装置,其特征在于:所述阀组包括三位四通电磁换向阀和叠加型双单向节流阀,所述三位四通电磁换向阀设置有p口、t口、a口、b口,该换向阀处于中位时p口处于断开状态,a口、b口和t口处于导通状态;该换向阀处于左位时a口与p口处于导通状态,b口与t口处于导通状态;该换向阀处于右位时a口与t口处于导通状态,b口与p口处于导通状态;所述叠加型双单向节流阀设置有a口、b口、c口、d口,其中a口、b口之间设置有并联的单向阀和节流阀,c口、d口之间设置有并联的单向阀和节流阀,所述p口通过管路连接蛟龙号高压油源,t口连接蛟龙号油箱,a口与a口连接,b口与c口连接,b口通过管路与活塞左侧的腔室连接,d口通过管路与活塞右侧的腔室连接,所述保护壳连接有压力自适应装置,所述压力自适应装置为固定在保护壳上的弹簧式蓄能器。
3.根据权利要求2所述蛟龙号深潜器搭载的深海水体与岩芯自动取样装置,其特征在于:所述弹簧式蓄能器包括罐体,所述罐体内设置有弹簧和可以进行滑动的隔板,所述隔板将罐体内空腔分隔成两个密封的腔室,其中一个腔室内充有液压油,并且该腔室通过管路与保护壳相连通,另一个腔室开有海水流通口。
4.根据权利要求1所述蛟龙号深潜器搭载的深海水体与岩芯自动取样装置,其特征在于:所述阀组包括两位二通电磁阀、截止阀和节流阀,两位二通电磁换向阀设置有i口、y口,该换向阀处于左位时,其i口与y口处于连通状态;处于右位时其i口与y口处于断开状态;截止阀设置有k口和x口,节流阀设置有h口和j口,所述i口通过管路与活塞右侧的腔室连接,y口与阀组外部连通,所述保护壳上固定有高压气瓶,所述高压气瓶的z口分别与j口和k口连接,h口通过管路与活塞左侧的腔室连接,x口与阀组外部连通。
5.根据权利要求1所述蛟龙号深潜器搭载的深海水体与岩芯自动取样装置,其特征在于:所述缸体内壁上设置有大螺旋升角的内螺纹,活塞的外圆周面设置有大螺旋升角且与缸体内螺纹相啮合的外螺纹,所述活塞右侧固定有预紧螺母,所述活塞杆右端贯穿活塞并与预紧螺母连接,预紧螺母侧面设置有销孔,销钉贯穿预紧螺母和活塞杆,缸体左端端面密封连接有左端盖,缸体右端端面密封连接有右端盖,所述活塞杆密封滑动穿出左端盖,所述左端盖与活塞左侧之间为腔室ⅰ,并且左端盖上设置有连通腔室ⅰ和b口的高压管道,所述右端盖与活塞右侧之间为腔室ⅱ,且当活塞移动至最右端时预紧螺母紧贴右端盖的左端面,右端盖上设置有连通腔室ⅱ和d口的管道。
6.根据权利要求1所述蛟龙号深潜器搭载的深海水体与岩芯自动取样装置,其特征在于:所述钻头为空心圆柱体结构,钻头左端端面边沿设置有倾斜的锯齿状结构,钻头的内壁上设置有内螺纹,钻头底部设置有用以平衡压力的泄压孔。
7.根据权利要求1所述蛟龙号深潜器搭载的深海水体与岩芯自动取样装置,其特征在于:所述右端盖的右侧连接有液压机械臂把手,所述液压机械臂把手为六边形内加横梁的绗架结构,液压机械臂把手底部设置有用于与右端盖连接的盘型底座。
技术总结
一种蛟龙号深潜器搭载的深海水体与岩芯自动取样装置,包括缸体,缸体内壁上设置有传动螺纹,缸体内设置有活塞,活塞左侧连接有活塞杆,活塞杆左端连接有钻头,位于活塞左侧的腔室和位于活塞右侧的腔室分别连接有用于交替供给两个腔室高压液体或高压气体以推动活塞移动的管路,管路上设置有用以切换管路通断的阀组,缸体连接有密封的保护壳,阀组设置在保护壳内。本发明可以实现钻头前进的同时不断旋转,深海取样装置采样过程不依赖液压机械臂的辅助推进作用,从而降低蛟龙号深潜器的采样难度,提高其作业精度。
技术研发人员:任玉刚,杨旭,刘延俊,于凯本,刘鑫
受保护的技术使用者:国家深海基地管理中心
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!