一种面向配电站房的声光融合振动源定位方法
本发明涉及一种面向配电站房的振动源定位方法,尤其是涉及一种基于声光融合的配电站房设备缺陷振动源定位方法。
背景技术:
1、配电站内部的设备在受到振动源的影响下可能发生松动、损坏或脱落,导致设备的安全性和稳定性下降。长期受到振动的设备可能会加速磨损和老化,缩短设备的使用寿命,进而影响整个配电系统的可靠性。然而传统的振动检测方法却难以满足配电站房现场的需求。
2、传统振动检测方法采用加速度传感器、位移传感器、声音传感器等来测量物体表面的振动变化,通过时延分析等手段定位振动源的位置。然而上述方法存在下述问题:1)传统振动传感器的频率范围有限,可能无法捕捉到一些高频率的异常振动信号,导致一些配电站房缺陷无法被及时发现;2)配电站房所处恶劣的环境限制了传感器的安装位置,不能完全覆盖设备的所有部位,导致某些异常振动信号被遗漏,进而影响了定位精度;3)传统方法通常需要周期性地进行振动检测,无法实时监测设备的振动状态,可能错过突发性的振动异常。近年来数字信号处理技术的发展和人工智能算法的应用日益增多,为更精确、高效的振动定位和分析提供了新的途径。
3、因此,基于新型数据处理手段,挖掘声信号中蕴含的缺陷信息,实现配电站房缺陷的快速、高灵敏度定位具有重要意义。
技术实现思路
1、本发明主要解决现有配电站房振动源定位精度不高的问题,提供了一种面向配电站房的声光融合振动源定位方法,它基于超声影像-可见光影像融合的振动源定位模型,实现配电站房振动源的高精度定位。
2、本发明的技术解决方案如下:
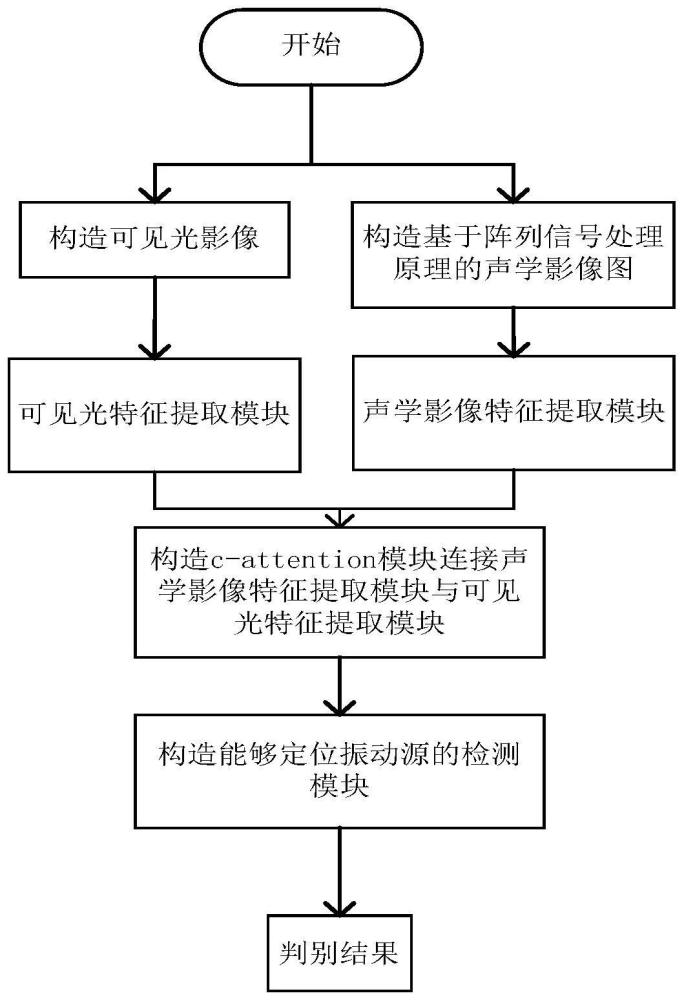
3、一种面向配电站房的声光融合振动源定位方法,包括以下步骤:
4、步骤1,构造一种基于阵列信号处理原理的声学影像图构造方法;
5、步骤2,以卷积神经网络或者transformer为骨架分别构造声学影像特征提取模块与可见光特征提取模块;
6、步骤3,构造c-attention模块连接声学影像特征提取模块与可见光特征提取模块;
7、步骤4,构造能够定位振动源的检测模块,该检测模块以可见光特征和声学特征为输入;
8、步骤5,将声学影像图和可见光相机捕捉到的设备影像作为模型的输入,反复训练模型,进而获得最终模型。
9、所述的步骤1中,具体构造声学影像的方法是:
10、步骤1.1,采用包含6个或者包含更多数目的阵列式麦克风采集配电站房场景中的振动所诱发的声信号,并采用可见光相机采集现场的可见光影像;
11、步骤1.2,采用互相关公式(1)获取某个方向上的声学强度:
12、
13、n代表麦克风的数目;yk(ω)为第k个麦克风接收到信号的傅里叶变换;τ代表在预估方向上两个麦克风收到信号的延迟,用于补偿这两个麦克风理想信号的传播时延;direction为声源的空间位置向量;α是加权系数,具体计算见式(2)
14、
15、步骤1.3,均匀扫描空间上的每个方向,获取不同方向上的声学强度,将不同的声音强度赋予不同的颜色,从而获得一张声学影像图。
16、所述的步骤2的具体操作方法为:
17、步骤2.1,构造可见光特征提取模块;该模块可以是经典卷积特征提取模块,例如resnet(residual network)、vgg(visual geometry group)等。也可以是基于transformer的特征提取网络vit(vision transformer)、swin(swin transformer),也可以是卷积网络和transformer骨干的融合。
18、步骤2.2,构造声学影像特征提取模块,考虑到声学影像分辨率不高,该模块主要由卷积网络构成。
19、所述的步骤3的具体操作方法为:
20、步骤3.1,构造c-attention模块,c-attention模块根据公式(3)-(5)计算矩阵q、k、v:
21、q=wqi (3)
22、k=wki (4)
23、v=wvi (5)
24、接着保留声像图的q矩阵,和可见光的k和v矩阵,按照式(6)-(7)计算矩阵o:
25、a=ktq (6)
26、
27、步骤3.2,将c-attention模块嵌入到声学影像特征提取模块与可见光特征提取模块之间。如图1所示,假设输入的声学影像特征尺寸为w*h维,可见光特征为w*h维,一起输入到c-attention中,c-attention一个特征矩阵特征,将该矩阵改变到w*2h维度,为再将特征拆分为两个w*h维,分别再次输入到声学影像特征提取模块与可见光特征提取模块中。
28、所述的步骤4的具体操作方法为:
29、采用经典detr(detection transformer)作为检测头,从而实现振动源的快速定位。
30、所述的步骤5的具体操作方法为:
31、将声学影像图和可见光相机捕捉到的配电站房设备影像进行配准,然后作为模型的输入,采用交叉熵函数作为损失函数,以异常振动源定位为ground truth,对模型进行收敛,从而得到最终的模型。后续将测试数据集作为输入,输入到最终模型中,最终模型自动输出振动源坐标。
32、本发明的有益效果是:基于超声影像-可见光影像融合的振动源定位模型,实现配电站房振动源的高精度定位。
技术特征:
1.一种面向配电站房的声光融合振动源定位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种面向配电站房的声光融合振动源定位方法,其特征在于,所述步骤1的构造一种基于阵列信号处理原理的声学影像图构造方法中,采用互相关函数获取某个方向上的声音相对强度,均匀扫描空间上的每个方向,获取不同方向上的声学强度,将不同的声音强度赋予不同的颜色,从而获得一张声学影像图。
3.根据权利要求1所述的一种面向配电站房的声光融合振动源定位方法,其特征在于,所述步骤2的以卷积神经网络或者transformer为骨架分别构造声学影像特征提取模块与可见光特征提取模块中,分别构造了声学影像特征提取模块与可见光特征提取模块。
4.根据权利要求1所述的一种面向配电站房的声光融合振动源定位方法,其特征在于,所述步骤3的构造c-attention模块连接声学影像特征提取模块与可见光特征提取模块中,
5.根据权利要求1所述的一种面向配电站房的声光融合振动源定位方法,其特征在于,所述步骤4中的构造能够定位振动源的检测模块,该检测模块detr核心。
6.根据权利要求1所述的一种面向配电站房的声光融合振动源定位方法,其特征在于,所述步骤5中将声学影像图和可见光相机捕捉到的设备影像作为模型的输入,将声学影像图和可见光相机捕捉到的配电站房设备影像进行配准,然后作为模型的输入,训练模型。
技术总结
本发明涉及一种面向配电站房的声光融合振动源定位方法,首先构造基于阵列信号处理原理的声学影像图;接着以卷积神经网络或者transformer为骨架分别构造声学影像特征提取模块与可见光特征提取模块;并构造c‑attention模块连接声学影像特征提取模块与可见光特征提取模块;接着构造能够定位振动源的检测模块,该检测模块以可见光特征和声学特征为输入;最后将声学影像图和可见光相机捕捉到的设备影像作为模型的输入,反复训练模型,进而获得最终模型,本发明的优点是基于超声影像‑可见光影像融合的振动源定位模型,实现配电站房振动源的高精度定位。
技术研发人员:张迎晨,王波,马恒瑞,王雷雄,马富齐,罗鹏,王红霞,孙立成,王明,刘蔚,尚宇炜,周莉梅,蒋朋飞,王伟,杨冬冬
受保护的技术使用者:武汉大学
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!