回风巷道的巡检方法、装置和机器人巡检系统与流程
本申请涉及回风巷道巡检,具体而言,涉及一种回风巷道的巡检方法、装置、计算机可读存储介质和机器人巡检系统。
背景技术:
1、煤矿回风巷道是指在煤矿中用于回收排出的煤矿瓦斯、尘埃等有害气体和粉尘的通道,在煤矿采矿过程中,需要进行通风,将新鲜空气引入矿井,同时将废气排出。回风巷道则是用于回收排出的废气和粉尘,减轻环境污染和保障矿工安全的重要通道。它通常位于采煤工作面后方,与进风巷道相对应,是煤矿通风系统中不可或缺的部分。
2、由于煤矿回风巷道是煤矿的重要设施,对煤矿回风巷道的巡检也至关重要,但是煤矿回风巷道中环境恶劣,经常存在着安全隐患,威胁着巡检人员的生命安全,同时,在巡检人员在巡视煤矿回风巷道时,巡检效率低下,往往难以及时发现问题,并且存在主观上的判断失误,难以达到理想的巡查效果。
技术实现思路
1、本申请的主要目的在于提供一种回风巷道的巡检方法、装置、计算机可读存储介质和机器人巡检系统,以至少解决现有技术中人工巡检回风巷道存在安全问题并且人工巡检的效率较低的问题。
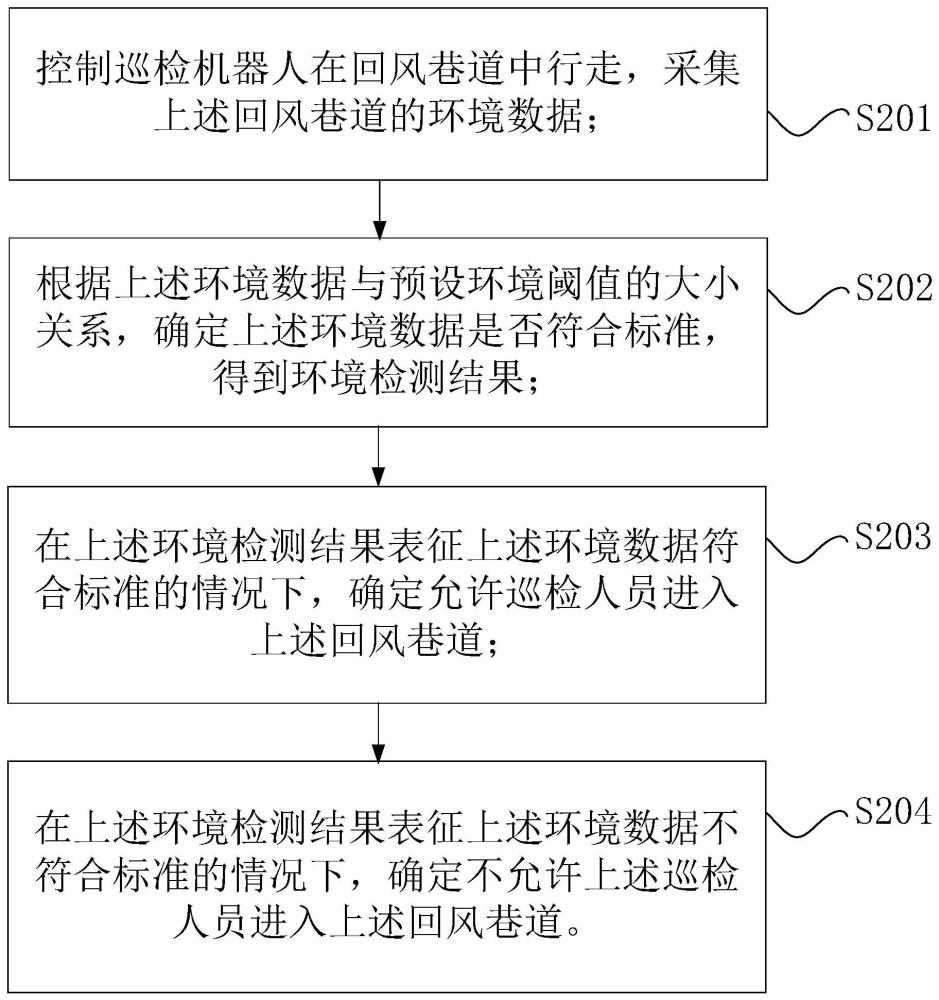
2、为了实现上述目的,根据本申请的一个方面,提供了一种回风巷道的巡检方法,包括:控制巡检机器人在回风巷道中行走,采集所述回风巷道的环境数据;根据所述环境数据与预设环境阈值的大小关系,确定所述环境数据是否符合标准,得到环境检测结果;在所述环境检测结果表征所述环境数据符合标准的情况下,确定允许巡检人员进入所述回风巷道;在所述环境检测结果表征所述环境数据不符合标准的情况下,确定不允许所述巡检人员进入所述回风巷道。
3、可选地,采集所述回风巷道的环境数据,包括:获取检测点的风速,其中,所述风速为所述巡检机器人行走至所述检测点通过风速传感器获取得到的;获取所述检测点的二氧化碳浓度,其中,所述二氧化碳浓度为所述巡检机器人行走至所述检测点通过二氧化碳浓度传感器获取得到的;获取所述检测点的粉尘浓度,其中,所述粉尘浓度为所述巡检机器人行走至所述检测点通过粉尘检测仪获取得到的;获取所述检测点的瓦斯浓度,其中,所述瓦斯浓度为所述巡检机器人行走至所述检测点通过瓦斯浓度传感器获取得到的;采用第一公式计算所述环境数据,其中,所述第一公式为:
4、
5、xjj表示所述环境数据,fsj表示所述风速,fs表示风速阈值,coj表示所述二氧化碳浓度,co表示二氧化碳浓度阈值,fcj表示所述粉尘浓度,fc表示粉尘浓度阈值,wsj表示所述瓦斯浓度,ws表示瓦斯浓度阈值,q1表示风速权重因子,q2表示二氧化碳浓度权重因子,q3表示粉尘权重因子,q4表示瓦斯浓度权重因子。
6、可选地,在控制巡检机器人在回风巷道中行走,采集所述回风巷道的环境数据之后,所述方法还包括:控制所述巡检机器人在所述回风巷道中行走,采集所述回风巷道的设备数据,其中,所述设备数据为所述回风巷道内安装的设备的工作状态;控制所述巡检机器人在所述回风巷道中行走,采集所述回风巷道的断面数据,其中,所述断面数据为所述回风巷道的不同位置的截面尺寸;根据所述设备数据与预设设备阈值的大小关系,确定所述设备数据是否符合标准,得到设备检测结果;根据所述断面数据与预设断面阈值的大小关系,确定所述断面数据是否符合标准,得到断面检测结果;在所述设备检测结果表征所述设备数据不符合标准和/或所述断面检测结果表征所述断面数据不符合标准的情况下,生成提示信息,并将所述提示信息发送至目标终端,其中,所述提示信息用于提示所述回风巷道内的设备异常和/或断面异常。
7、可选地,采集所述回风巷道的设备数据,包括:获取设备的标签数据,根据所述标签数据确定所述设备的设备身份,其中,所述标签数据为所述巡检机器人行走过程中通过rfid读写传感器获取到的所述设备的设备编号、设备名称和设备所处深度;获取所述设备的表面的温度和测温时间,其中,所述温度为所述巡检机器人读取到所述设备的所述设备身份通过红外测温仪获取得到的。
8、可选地,采集所述回风巷道的断面数据,包括:获取所述回风巷道的断面高度,其中,所述断面高度为所述巡检机器人通过三维扫描仪获取得到的;获取所述回风巷道的断面宽度,其中,所述断面宽度为所述巡检机器人通过三维扫描仪获取得到的;获取所述回风巷道的断面面积,其中,所述断面面积为所述巡检机器人通过摄像头采集到的巡检画面中的断面的轮廓获取得到的;采用第二公式计算所述断面数据,其中,所述第二公式为:
9、
10、cci表示所述断面数据,gdi表示所述断面高度,gdi表示高度阈值,li表示所述断面宽度,li表示宽度阈值,si表示所述断面面积,si表示面积阈值,n1表示断面高度权重因子,n2表示断面宽度权重因子,n3表示断面面积权重因子。
11、可选地,在确定不允许所述巡检人员进入所述回风巷道之后,所述方法还包括:控制安全隔离设备关闭,以禁止所述巡检人员进入所述回风巷道,其中,所述安全隔离设备包括闸机和/或栅栏。
12、可选地,在确定允许巡检人员进入所述回风巷道之后,所述方法还包括:获取人脸图像,其中,所述人脸图像为通过图像采集设备获取到的;将所述人脸图像与预设图像数据库中存储的多个预设图像依次进行对比,得到多个对比结果;在有任意一个所述对比结果表征匹配成功的情况下,控制所述安全隔离设备开启;在所有的所述对比结果表征匹配不成功的情况下,控制所述安全隔离设备关闭。
13、根据本申请的另一方面,提供了一种回风巷道的巡检装置,包括:第一巡检单元,用于控制巡检机器人在回风巷道中行走,采集所述回风巷道的环境数据;第一确定单元,用于根据所述环境数据与预设环境阈值的大小关系,确定所述环境数据是否符合标准,得到环境检测结果;第二确定单元,用于在所述环境检测结果表征所述环境数据符合标准的情况下,确定允许巡检人员进入所述回风巷道;第三确定单元,用于在所述环境检测结果表征所述环境数据不符合标准的情况下,确定不允许所述巡检人员进入所述回风巷道。
14、根据本申请的再一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行任意一种所述回风巷道的巡检方法。
15、根据本申请的又一方面,提供了一种机器人巡检系统,包括:一个或多个处理器,存储器,以及一个或多个程序,其中,所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行任意一种所述的回风巷道的巡检方法。
16、应用本申请的技术方案,控制巡检机器人代替巡检人员对回风巷道进行巡检,机器人巡检这种智能化巡检方式相比人工巡检的效率更高一些,并且在环境数据符合标准的条件下才会让巡检人员进入回风巷道,这样巡检人员可以进入回风巷道进行人工巡检,或者维修出现问题的设备和断面,在环境数据不符合标准的条件下不让巡检人员进入回风巷道,保证了巡检人员的安全,进而解决了现有技术中人工巡检回风巷道存在安全问题并且人工巡检的效率较低的问题。
技术特征:
1.一种回风巷道的巡检方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,采集所述回风巷道的环境数据,包括:
3.根据权利要求1所述的方法,其特征在于,在控制巡检机器人在回风巷道中行走,采集所述回风巷道的环境数据之后,所述方法还包括:
4.根据权利要求3所述的方法,其特征在于,采集所述回风巷道的设备数据,包括:
5.根据权利要求3所述的方法,其特征在于,采集所述回风巷道的断面数据,包括:
6.根据权利要求1至5中任意一项所述的方法,其特征在于,在确定不允许所述巡检人员进入所述回风巷道之后,所述方法还包括:
7.根据权利要求6所述的方法,其特征在于,在确定允许巡检人员进入所述回风巷道之后,所述方法还包括:
8.一种回风巷道的巡检装置,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行权利要求1至7中任意一项所述回风巷道的巡检方法。
10.一种机器人巡检系统,其特征在于,包括:一个或多个处理器,存储器,以及一个或多个程序,其中,所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行权利要求1至7中任意一项所述的回风巷道的巡检方法。
技术总结
本申请提供了一种回风巷道的巡检方法、装置和机器人巡检系统。该方法包括:控制巡检机器人在回风巷道中行走,采集回风巷道的环境数据;根据环境数据与预设环境阈值的大小关系,确定环境数据是否符合标准,得到环境检测结果;在环境检测结果表征环境数据符合标准的情况下,确定允许巡检人员进入回风巷道;在环境检测结果表征环境数据不符合标准的情况下,确定不允许巡检人员进入回风巷道。该方案解决了现有技术中人工巡检回风巷道存在安全问题并且人工巡检的效率较低的问题。
技术研发人员:郭爱军,孟永兵,陈殿赋,朱锋,张增辉,刘大军
受保护的技术使用者:国能神东煤炭集团有限责任公司
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!