一种坡体材质及结构数据采集装置及方法与流程
本发明涉及坡体数据采集装置,具体为一种坡体材质及结构数据采集装置及方法。
背景技术:
1、随着我国道路建设的成熟化,在很多路段需要开山,而对道路两侧的坡体结构进行有效固定,避免坡体上的岩石坠落,对道路造成损坏以及堵塞,对于不同的坡度进行不同的防护措施,60°以上的坡体,很难进行积水与积雪,主要是温度变化造成的风化为主,一般采用钢丝网等金属网体结构,进行深度锚定,从而对整体岩壁进行防坠防护,而30°至60°的坡体容易造成积水与积雪,故而水浸造成的岩石风化为主,一般采用先铺设金属网格后种植草皮,实现有效的坡体固化,但是这种方式一般需要过量固化,但这会增加坡体的负载,反而会使得坡体的牢固性发生变化,故而需要对坡体进行材质数据及结构数据进行有效获取,从而采用更加适量的固化方式。
2、对于30°至60°以上的坡体由于采用种植固化方式,对于岩体的表层的要求较高,需要采集的数据较多,而人工行走采集费时费力,且极易发生危险,同时由于岩石坡体采用爆破方式进行开槽,故而破面的平整度并不相同,从而一般的路面数据采集装置由于行走的平稳性无法保证,使得其在这种环境下采集的数据会发生较大的偏差。
3、因此,设计一种坡体材质及结构数据采集装置及方法是很有必要的。
技术实现思路
1、本发明的目的在于提供一种坡体材质及结构数据采集装置及方法,以解决上述背景技术中提出的问题。
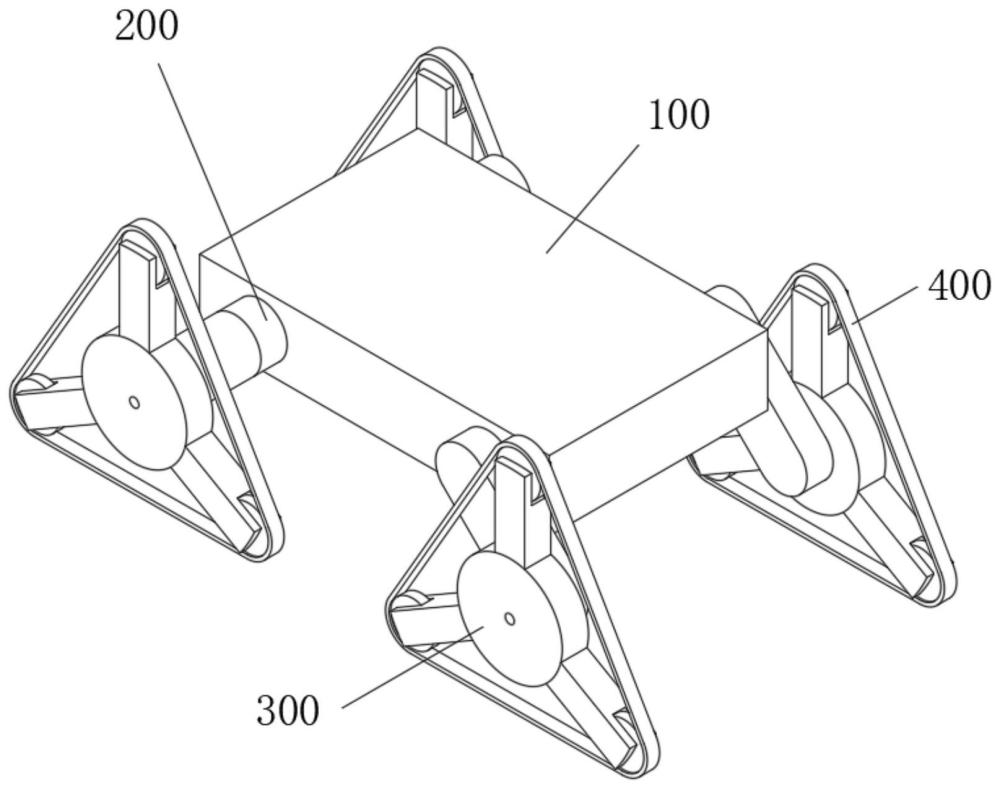
2、为了解决上述技术问题,本发明提供了一种坡体材质及结构数据采集装置,其特征在于:所述采集装置包括主机箱和安装在主机箱两侧的至少两组行走机构,所述主机箱通过至少两组行走机构支撑并脱离地面;每组行走机构包括传动摆臂、转动轮架与履带,所述传动摆臂一端与主机箱连接,所述转动轮架通过轴杆转动安装于传动摆臂的自由端,所述转动轮架的外周环绕有履带;
3、所述主机箱包括保护箱壳,在保护箱壳内固定安装有微机终端、图像采集装置、蓄电池与行走控制机构,所述图像采集装置包括全景摄像头,每组行走机构对应设有一组行走控制机构,所述行走控制机构包括变速箱和固定安装在变速箱的输入端的伺服电机组件,所述行走机构的传动摆臂通过轴杆转动连接对应行走控制机构的变速箱;
4、所述微机终端电连接图像采集装置、蓄电池与伺服电机组件,通过图像采集装置上的全景摄像头采集边坡的图像数据,并将数据输送给微机终端,由微机终端进行数据处理,形成岩石坡面的表层及次深层的岩体材质及结构数字型图。
5、本发明较优的技术方案:所述微机终端设有无线通讯模块,所述图像采集装置设有激光反馈器,所述激光反馈器通过圆锥摆幅方式对对边坡上钻设的岩孔进行探测,以此探测出其延伸角度,并基于激光反馈装置测定的延伸角度,对其全景摄像头的延伸探测角度进行矫正;所述全景摄像头通过伸缩机构安装在保护箱壳底面,所述微机终端内植有装置驱动程序,对全景摄像头探测步长进行设定,全景摄像头位于步长节点处采集图像,并基于内置的指南针定位程序对图像进行正南方位标记;并由微机终端中的数据处理模块进行数据处理形成岩石坡面的表层及次深层的岩体材质及结构数字型图,其数据处理方法包括但不限于图像畸变矫正算法、灰度均衡化算法、中值滤波算法、高通增强方法、拉普拉斯锐化算法、canny算法、图像回卷方法、isp算法、时域算法、cnn图像卷积算法、统计拟合算法与svm算法对数据进行处理。
6、本发明较优的技术方案:所述行走机构设有四组,两辆对称分布在主机箱的两侧,所述变速箱为四个,且分别安装于保护箱壳的两侧内壁,且对称分布,所述蓄电池为两块,对称固定安装与主机箱的前侧与后侧,所述微机终端与图像采集装置位于主机箱的中部;所述保护箱壳内固定安装有两个横向电子水平仪与两个纵向电子水平仪,两横向电子水平仪前后对称设置,两纵向电子水平仪左右对称设置。
7、本发明较优的技术方案:所述传动摆臂包括机械腔壳,所述机械腔壳的定点端转动安装有一级转轴,所述一级转轴上固定安装有一级中心齿轮与一级主动锥齿轮,所述机械腔壳的定点端内固定安装有一级外齿轮环,所述一级中心齿轮与一级外齿轮环间圆周分布有一级行星齿轮,所述机械腔壳的自由端转动安装有二级转轴,所述二级转轴一端位于机械腔壳内,且固定安装有一级从动锥齿轮,另一端位于转动轮架内,所述一级主动锥齿轮与一级从动锥齿轮通过一级传动齿轴动力连接,所述一级主动锥齿轮的齿数与一级从动锥齿轮的齿数相同,所述一级传动齿轴两端的伞齿齿数相同;前侧的两组行走机构中的传动摆臂的工作角度为-45°至45°,且初始工作角度为-45°,后侧两组行走机构中的传动摆臂的工作角度为135°至225°,且初始工作角度为225°。
8、本发明较优的技术方案:所述主机箱内固定安装有储水箱与水气混合增压装置,且水气混合增压装置的喷口与全景摄像头及激光反馈装置相互配合。
9、本发明较优的技术方案:所述转动轮架包括盘盒与支架壳,所述支架壳为三个,且呈圆周分布焊接于盘盒的外周,所述盘盒内固定安装有二级外齿轮环,所述盘盒内设有二级中心齿轮与二级主动锥齿轮,且均固定安装于二级转轴上,所述二级中心齿轮于二级外齿轮环间圆周分布有二级行星齿轮,所述支架壳内转动安装有二级从动锥齿轮、传动齿轮,所述支架壳的外端转动安装有滚轮,所述滚轮的轴杆上固定安装有端齿轮,所述二级主动锥齿轮与二级从动锥齿轮间通过二级传动齿轴动力连接,所述二级从动锥齿轮啮合传动传动齿轮,所述传动齿轮啮合传动端齿轮,三个所述滚轮滚动支撑履带,所述二级主动锥齿轮的齿数与二级从动锥齿轮的齿数相同,所述二级传动齿轴两端的伞齿齿数相同。
10、本发明还提供了一种坡体材质及结构数据采集方法,所述采集方法基于上述坡体材质及结构数据采集装置进行数据采集,具体包括如下步骤:
11、s1、通过lidar采集岩体坡面的三维点云数据,基于点云数据构建三维空间模型,同时通过ransac算法结合ipc算法对三维点云数据进行计算处理,对三维空间模型进行区域划分,形成若干特征区域与普通区域;
12、s2、对特征区域内已存在的岩孔设定若干极点,进行数据采样点的设定;对普通区域已存在的岩孔设定单点,进行数据采样点设定;
13、s3、数据采集装置基于区域划分在坡体上行走,通过图像采集装置在设定的特征区域与普通区域内的数据采样点进行数据采集,数据采集设备基于特征区域内的极点与普通区域内的单点进行路径规划,极点与单点为路径的拐点,对拐点处的岩孔进行位置再次位置确定,而后通过高速气流挟动高速水流,对岩孔内进行清理,使得孔内处于干净光滑状态;所述数据采集装置通过激光反馈装置与全景摄像头对岩孔内的图像进行获取,并回传至微机终端;
14、s4、微机终端接受图像采集装置采集的数据,并进行数据处理,通过函数计算拟合,形成岩石坡面的表层及次深层的岩体材质及结构数字型图。
15、本发明进一步的技术方案:所述s4步骤中的数据处理包括如下步骤:
16、a.微机终端(102)将回传的图像划分为主区域与辅助矫正区域,全步长节点处采集的图像进行整合,即主区域与辅助矫正区域相互拟合正畸后,形成完整孔洞的筒形图,所述图像辅助矫正方式如下:对图像中部像素进行标准化数值取定,其包含像素的标准像素宽度a1、标准图像区域宽度width1、形变像素宽度an及形变图像区域widthn,通过如下公式计算像素形变系数与图像形变系数:
17、nn=an/a1,nn为像素形变系数;
18、nm=widthn/width1,nm为图像区域形变系数;
19、nn/nm=l及nm/nn=r,l与r两个值为图像的两个方向形变向量,而后基于l与r进行复位矫正;
20、b.基于激光反馈器角度参数,设定为岩孔的筒形图的中心轴,而后通过中心轴及图像上的方位标记连线构建展开基准平面,以此对图像进行再次微调矫正,使得方位标记位于同一直线上;
21、c.通过再次矫正后的方位标记构成的直线将筒形图进行展开,构成矩形图,而后对矩形图进行灰度均衡化处理,再通过中值滤波、高通增强、拉普拉斯锐化对图像进行预处理,预处理后的图像使用canny算法对图像边缘进行修剪计算,形成矩形图像;
22、d.通过矩形图像回卷形成圆筒界面图像,然后进行三分支处理;
23、分支一通过圆筒界面图像对岩孔壁的岩层形态进行计算获得,之后通过isp算法结合时域算法对岩层的外延展趋势进行计算模拟;所述岩层形态计算基于步骤c的图像个边缘计算,获得明显的图像曲线,将图像曲线进行函数图像拟合计算,函数公式如下:
24、y=a·sin(w·x+b)+c
25、公式中a为振幅,x为时间点,b为相位差,c为起始高程;
26、分支二通过圆筒界面图像向内部进行cnn图像卷积,进行虚拟构图,形成虚拟岩柱,基于虚拟岩柱对岩孔延伸向的岩层结构进行确定;所述向内部进行cnn图像卷积获得虚拟图像的计算方式如下:
27、
28、公式中id为输入维度,od为输出维度,ksize为卷积核大小,s为步长;
29、分支三使用svm算法,对圆筒界面图像进行材质对比分析,通过材质对比分析结果,对岩层分界线进行确定;所述svm算法的材质对比分析基于步骤c的的灰度平衡化处理,进行显著特征值s(i(x,y))的计算:
30、
31、公式中i(x,y)示图像中各像素点(x,y)的灰度值,||·||示灰度距离度量,k表示从0到255的灰度阶,count(k)表示灰度阶中每个灰度的个数;
32、通过特征值s(i(x,y))与数据库中的材质的特征值进行对比分析;
33、基于分支一获得的岩层外延展趋势及分支二的虚拟岩柱结构,形成当前样点岩孔的岩体结构样图,再结合分支三获得的材质分析结果,构成当前采样点的岩层材质与结构综合数字数据图;
34、e.通过坡体全部采样点的综合数字数据图构建岩层结构点云图,通过岩层结构点云图统计计算整体坡面的岩层布局趋势。
35、本发明较优的技术方案:所述s1步骤的具体划分方法为:
36、a、基于坡面开凿过程中所留岩孔或前期地形地质检测所留岩孔进行区域预划分;
37、b、基于岩体破碎状结构进行地形等级划分,其中破碎带长度为数十米至数百米,破碎带宽为数厘米至1米左右,断层、节理发育良好为iii级地形,破碎带长度为数十厘米至几十米,主要发育为节理、层理、次生裂隙、小断层为iv级地形,设定阈值并基于二分法进行精准界线设定;
38、c、对区域内含有iv级特征地形与iii级特征地形得区域设定为特征区域,对于不含有上述特征得地形得区域设定为普通区域。
39、本发明进一步的技术方案:所述s2步骤内的特征区域的极点设定与普通区域的单点设定的具体方法如下:
40、在特征区域内基于特征区域划分的界线,对区域内的岩孔进行布孔图形构建,同时对特征区域进行平面图形构建,将布孔图形与平面图形进行偏差计算,将布孔图形内贴合平面图形边缘的岩孔以及布孔图形内与平面图形几何中心最近的岩孔设定为数据采样点的极点;
41、在普通区域内基于边缘界线构建平面图形,计算获得平面图形的几何中心,通过几何中心拟合计算最近的岩孔,将该孔设定为数据采样点的单点。
42、与现有技术相比,本发明所达到的有益效果是:通过主机箱设置的全景摄像头对岩孔内的岩层进行图像数据获取,并对岩孔内图像数据处理,获得结构与材质进行数据采集,而在传动摆臂与转动轮架的作用下,使得整个装置能够在坡体表面不平整的情况下进行有效的行走,从而装置整体再坡体上的行走更加平稳,以此保证采集数据的稳定性,从而获取准确的坡体岩石材质与结构数据,以此能够选择合适的固坡方式。
- 还没有人留言评论。精彩留言会获得点赞!