一种基于激光雷达对隧道洞口坡体形变的监测方法与流程
本发明涉及隧道洞口坡体形变监测,更具体的说是涉及一种基于激光雷达对隧道洞口坡体形变的监测方法。
背景技术:
1、隧道是一种长、窄的地下通道,通常由岩石、土壤、混凝土或钢铁等材料构成,用于容纳交通工具,供水、电力线路等设施,或提供其他地下通行通道。隧道作为城市基础设施的重要组成部分,在现代社会中扮演着至关重要的角色,隧道在城市基础设施中具有多种应用,如地铁、道路隧道、水利工程中的水道隧道等。它们的设计和维护对于城市的可持续发展和居民的生活至关重要。
2、然而,隧道洞口地段,一般地质条件差,围岩破碎,埋深浅,有时还有偏压现象,同时地表水易渗入洞口段地层中,软化地层,开挖洞口边仰坡时,破坏了山体原有的平衡状态,洞口段也往往是软硬岩层交界的地方,所有这些因素都易引起坍方。
3、因此,隧道洞口坡体形变监测是隧道工程安全管理的重要组成部分。传统方法通常依赖于视觉观测、测量仪器以及周期性地进行人工测量,存在以下技术缺陷:
4、有限监测频率:传统方法受制于人力资源和时间限制,监测频率有限,无法实时跟踪坡体形变。
5、主观性和不精确性:人工测量容易受到主观因素的干扰,导致数据不准确。
6、无法覆盖全局:隧道坡体形变是一个立体问题,传统方法无法提供全局监测。
7、无法实时报警:传统方法无法及时发现危险信号,缺乏实时报警机制。
8、因此,开发一种创新的、高效的监测方法至关重要。
技术实现思路
1、有鉴于此,本发明提供了一种基于激光雷达对隧道洞口坡体形变的监测方法,旨在解决现有技术中的缺陷。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明实施例提供一种基于激光雷达对隧道洞口坡体形变的监测方法,包括以下步骤:
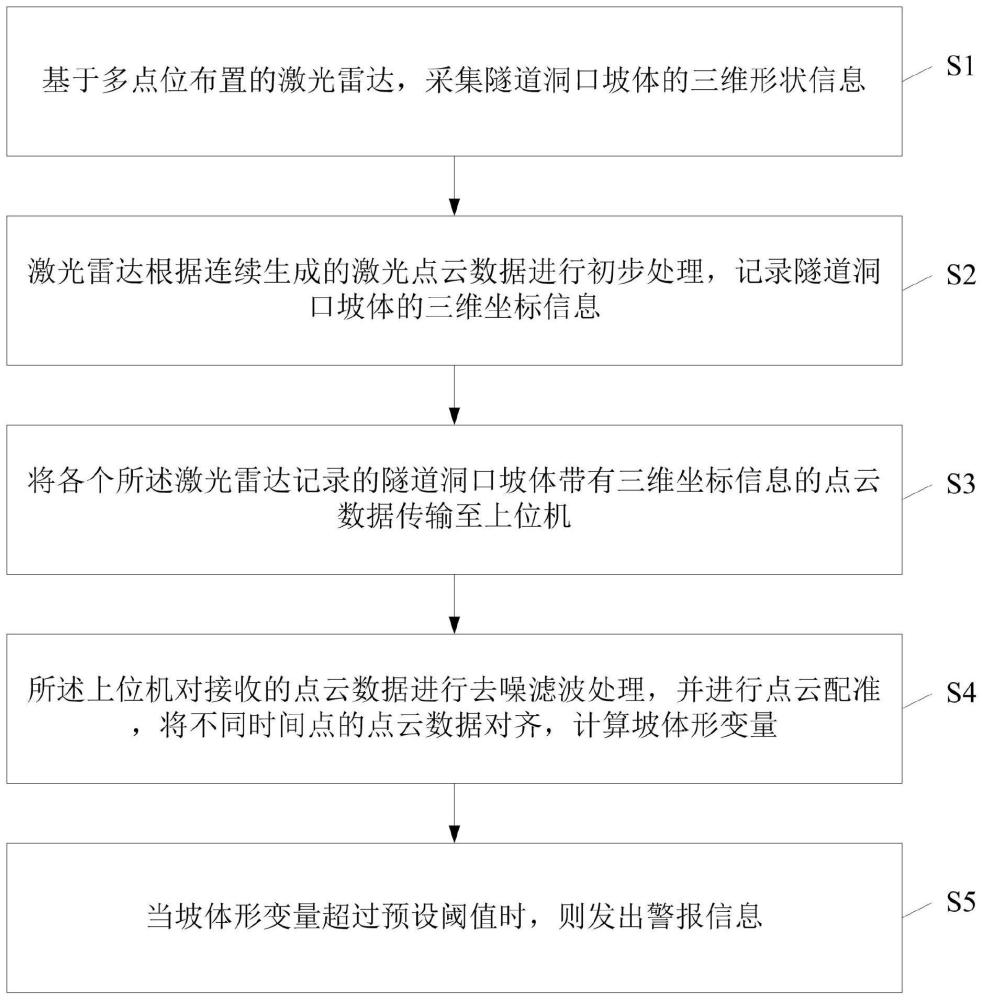
4、s1、基于多点位布置的激光雷达,采集隧道洞口坡体的三维形状信息;
5、s2、激光雷达根据连续生成的激光点云数据进行初步处理,记录隧道洞口坡体的三维坐标信息;
6、s3、将各个所述激光雷达记录的隧道洞口坡体带有三维坐标信息的点云数据传输至上位机;
7、s4、所述上位机对接收的点云数据进行去噪滤波处理,并进行点云配准,将不同时间点的点云数据对齐,计算坡体形变量。
8、进一步地,还包括以下步骤:
9、s5、当坡体形变量超过预设阈值时,则发出警报信息。
10、进一步地,所述步骤s1中的多点位布置的激光雷达,基于隧道洞口环境在多个位置、不同高度、不同角度和不同方向进行布置,用于覆盖整个隧道洞口坡体的目标区域,各个激光雷达的监测区域存在部分重叠;均通过线缆相互连接;再通过有线或无线方式与上位机通信。
11、进一步地,所述步骤s2包括:
12、激光雷达根据连续生成的激光点云数据进行激光雷达的误差校正和坐标系转换的处理,记录隧道洞口坡体的三维坐标信息。
13、进一步地,激光点云数据进行坐标系转换的处理,包括:
14、确定各个激光雷达的坐标系和隧道洞口的坐标系;
15、采用旋转矩阵、平移矩阵、缩放变换矩阵,将激光点云数据从激光雷达的坐标系转换到隧道洞口坐标系中;
16、其中,旋转矩阵为:
17、
18、
19、
20、平移矩阵为:
21、
22、缩放变换矩阵为:s=r*t;其中,r为rx、ry或rz。
23、进一步地,所述步骤s4包括:
24、所述上位机对接收的点云数据使用统计滤波方法来识别并去除点云中的离群点,应用高斯滤波或形态学滤波来减少点源数据中的高频噪声;
25、采用sift算法来检测经过预处理后点云中的关键特征点;
26、将多个不同位置或角度所对应的点云数据集中的关键特征点进行特征匹配;采用有限元分析建立变形模型;
27、采用非刚性icp算法或ndt算法进行配准,将多个配准后的点云合并成一个大的点云,作为完整的隧道洞口坡体三维形状模型;
28、结合有限元分析结果,以及所述洞口坡体三维形状模型与坡体基准模型的比较结果,进行可视化呈现和分析,计算坡体形变量。
29、进一步地,采用sift算法来检测经过预处理后点云中的关键特征点,包括:
30、构建高斯金字塔,将预处理后的点云数据进行多次降采样,生成一系列不同尺度的图像或点云;
31、在每个尺度级别上,采用差分高斯的算法来检测局部特征点;
32、采用抛物线拟合来确定关键点的亚像素级别位置;
33、对检测到的关键点进行过滤操作,根据局部对比度来筛选关键点,只保留具有足够对比度的点;
34、计算关键点周围区域的梯度方向,并选择具有最大梯度幅值的方向作为主要方向;
35、为每个关键点生成描述子,用于描述其周围区域的特征;所述描述子是基于关键点周围的梯度或点云法线的局部特征统计信息;
36、计算描述子之间的距离或相似性度量,以找到匹配的关键点对;
37、对匹配结果进行滤波操作,获得匹配后的关键点信息,以捕捉点云中的特征和形状信息。
38、进一步地,采用有限元分析建立变形模型,包括:
39、建立一个坡体的有限元模型,所述坡体的有限元模型由一组有限元组成;每个有限元代表坡体的一个小区域;
40、为坡体的不同区域和材料建立材料模型,包括:坡体材料的弹性模量、泊松比和密度;
41、定义约束和加载的边界条件;所述边界条件描述了坡体与外界环境的交互,以模拟坡体受到的各种影响;
42、将所述坡体的有限元模型划分为有限元,并在每个有限元内进行离散化处理;
43、基于均衡方程和材料本构方程,建立位移方程,描述坡体各个有限元之间的位移关系,得到坡体各个有限元的位移和应力分布。
44、进一步地,采用非刚性icp算法进行配准,具体包括:
45、将两两点云数据集做如下配准:
46、计算第二点云数据集中的每一个点在第一点云数据集中的对应近点;
47、求得使上述对应点对平均距离最小的刚体变换,求得平移参数和旋转参数;
48、对所述第二点云数据集使用求得的所述平移参数和旋转参数,得到新的变换点集;
49、当新的变换点集与参考点集满足两点集的平均距离小于阈值时,则停止迭代计算,否则新的变换点集作为新的第二点云数据集继续迭代,直到满足要求。
50、进一步地,采用ndt算法进行配准;具体包括:
51、将两两点云数据集做如下配准:
52、将第一点云数据集进行体素分割,然后计算每一个体素的正态分布参数,包括均值和方差;
53、将第二点云数据集中的每一个点,进行矩阵变换到第一点云数据集中的体素中去;
54、根据体素中的均值和方差,以及转换后的新坐标,求得每一个点的概率密度;
55、将所有转换后的概率密度进行累加,然后进行迭代优化直至找到最优的转换矩阵,完成配准。
56、经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种基于激光雷达对隧道洞口坡体形变的监测方法,包括:基于多点位布置的激光雷达,采集隧道洞口坡体的三维形状信息;激光雷达根据连续生成的激光点云数据进行初步处理,记录隧道洞口坡体的三维坐标信息;将各个所述激光雷达记录的隧道洞口坡体带有三维坐标信息的点云数据传输至上位机;所述上位机对接收的点云数据进行去噪滤波处理,并进行点云配准,将不同时间点的点云数据对齐,计算坡体形变量。该方法基于激光雷达的测距精度高,监测数据更准确。激光雷达能够覆盖整个洞口坡体,实现全局监测。可实现高频率的坡体形变监测,实时捕捉坡体的微小位移。上位机中的实时报警机制可及时发现危险信号,提高隧道工程的安全性。
- 还没有人留言评论。精彩留言会获得点赞!