一种用于深潜器推进器的故障诊断系统及方法
本发明涉及深潜器推进系统故障诊断,具体涉及一种用于深潜器推进器的故障诊断系统及方法。
背景技术:
1、随着人工智能、材料和能源等领域的飞速发展,潜器的使命能力在不断提升。其工作场景主要为复杂多变的海洋环境,容易受到风浪流等载荷的耦合作用。如何保障其安全、可靠地完成各项任务是潜器不断发展的重要前提,如何准确、有效地对潜器进行状态监测和故障诊断是保障其安全性的关键技术。潜器推进器作为潜器的重要部分,与航行器的任何航次都息息相关,因此对推进器的故障诊断也极为重要。
2、推进器负荷较重且包含部件较多,故障原因复杂多变,对其故障诊断的研究在运动建模、信息处理、数据挖掘、深度学习等诸多领域,已得到海洋科学界的广泛关注,已经取得了诸多研究成果。但是与工业自动化与飞行器等推进系统故障诊断与健康管理系统相比,在潜器推进器方面,无论是故障诊断的基础理论还是智能健康监控系统研发都存在较大差距,关于推进系统故障诊断装备的研究开发也较为缺乏。
3、随着潜器运行环境不断复杂,任务类型不断丰富,推进器作为其主要部件,其是否能正常工作将对潜器产生重要影响。故障诊断系统作为故障诊断的重要工具,当前故障诊断主要依赖于个人便携式手提或台式计算机,但随着潜器工作环境趋向复杂化,个人便携式计算机可能无法适应高温高盐、极寒、风暴等恶劣气候条件,以至于丧失工作能力,无法实现精准高效的故障诊断。
4、因此,现需要一种能适应复杂气候条件、并对深潜器推进器的运行状态进行检测、识别并定位的故障诊断系统及方法。
技术实现思路
1、本发明的主要目的在于提供一种用于深潜器推进器的故障诊断系统及方法,以解决现有技术中深潜器推进器故障诊断系统不能适应复杂气候条件,以至于无法进行高精度、高效率的故障诊断的问题。
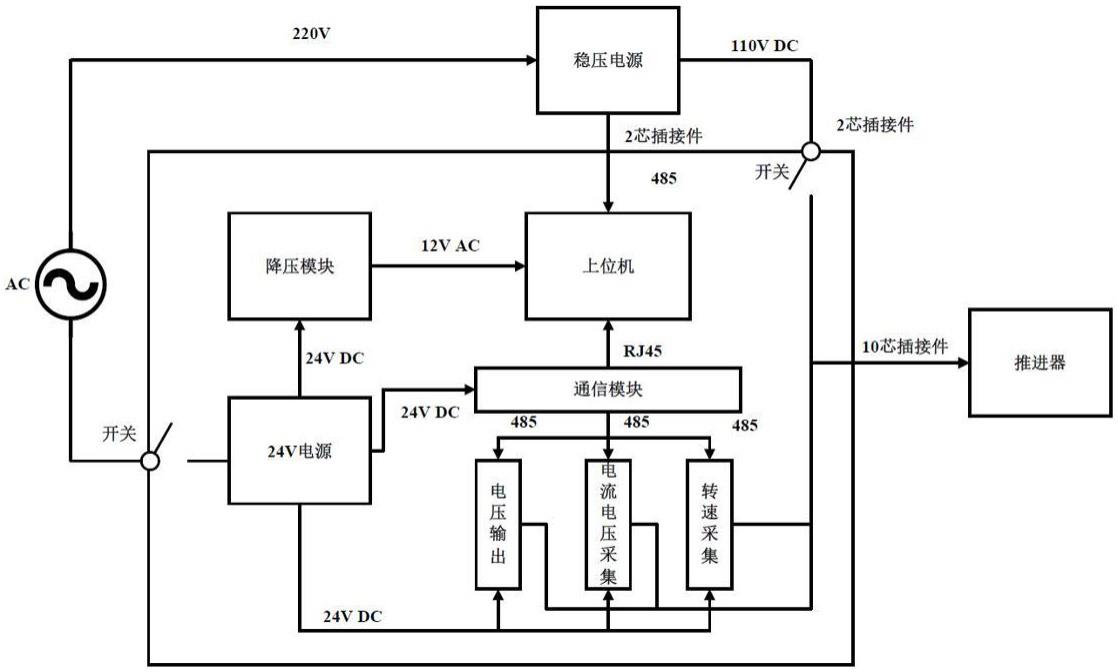
2、为实现上述目的,本发明提供了一种用于深潜器推进器的故障诊断系统,包括:外箱体、显示屏、键盘和电气设备,外箱体具有上盖和与上盖的一端连接的盒体,显示屏内嵌于上盖中,键盘位于盒体上表面,盒体内部具有电气设备,电气设备包括:电源模块、稳压电源、降压模块、上位机、通讯模块、电压输出模块、电流电压采集模块和转速采集模块;稳压电源还与推进器相连;降压模块和上位机相连,电压输出模块、电流电压采集模块和转速采集模块通过通信模块与上位机相连;电压输出模块、电流电压采集模块和转速采集模块分别与推进器连接。
3、进一步地,电源模块将输入的220v交流电压转化为24v直流电压,其中一路24v直流电压通过降压模块向上位机和显示屏供电,24v直流电压还分别向通信模块、电压输出模块、电流电压采集模块和转速采集模块供电。
4、进一步地,电源模块连接稳压电源后分别通过2芯插接件连接上位机,稳压电源通过导线连接2芯插接件后再连接10芯插接件的两个芯,最后连接推进器,10芯插接件从外箱体内部穿出;稳压电源将220v交流电转化为110v直流电给推进器供电,上位机通过485模块接收稳压电源向推进器输出的电流电压信号;电压输出模块、电流电压采集模块和转速采集模块模块通过10芯插接件的一部分导线与推进器连接并进行信号传输。
5、进一步地,电压输出模块将输入的数字信号经过数模转换,输出为连续电压信号。
6、进一步地,转速采集模块为pwm采集模块。
7、进一步地,通讯模块将rs485串口信号转换成以太网信号,上位机通过以太网接收数据,通讯模块与电压输出模块、电流电压采集模块和转速采集模块通过485模块进行数据传输。
8、本发明还提供一种用于深潜器推进器的故障诊断方法,具体包括如下步骤:
9、s1,获取深潜器推进器的运行数据,并对利用pca方法对运行数据降维。
10、s2,采用dbscan算法对运行数据进行分类,以提取故障数据。
11、s3,采用rfr算法对故障数据进行数据增强,得到故障样本数据,并对样本数据进行预处理,赋予相应的故障类别标签。
12、s4,基于卷积神经网络进行故障诊断。
13、进一步地,步骤s1具体包括如下步骤:
14、s1.1,矩阵由推进器运行数据构成,将矩阵定义为:
15、 (1)。
16、s1.2,将每一列的数据进行中心化,得到新的数据矩阵,中心化的公式为:
17、 (2)。
18、式(2)中代表被中心化的数据,代表遍历第行的每一个数据。
19、s1.3,计算样本的协方差矩阵:
20、 (3);
21、式(3)中代表为中心化后的矩阵。
22、s1.4,基于特征值或者svd分解协方差矩阵,求解出协方差矩阵的特征值以及对应的特征向量。
23、s1.5,将特征向量按对应特征值大小从上到下按行排列成矩阵,取得k行组成矩阵。
24、s1.6,得到降维后的新数据:
25、 (4);
26、即获得降维后的数据:
27、 (5)。
28、进一步地,步骤s3具体包括如下步骤:
29、s3.1,通过搭建实验平台获取推进器正常状态和驱动器损坏、桨叶丢失、异物缠绕三种故障类别的样本数据。
30、s3.2,通过人工或程序筛查对数据进行预处理,识别并剔除实测数据中的异常点、离群点,生成故障样本。
31、s3.3,使用预处理后的故障样本训练rfr,并针对不同推进器状态下的故障样本分别使用网格搜索法获得决策树数量,辨识 rfr 模型的各项参数,获得能够表现不同故障状态下推进器性能的3个rfr模型。
32、s3.4,添加高斯噪声模拟海洋噪声和环境干扰的情况,根据各个故障样本的缺失程度,利用训练完成的 rfr 按比例生成与实测样本规模相等的各类仿真故障样本,使得实测样本和各个仿真故障样本比例均为1:1。
33、s3.5,根据故障检测与分类的需要,整合实测样本与仿真样本以保证故障样本的相对多样性,对生成的样本数据进行预处理并打上相应故障类别标签。
34、进一步地,步骤s4具体包括如下步骤:
35、s4.1,计算电压电流相关系数和电压转速相关系数,以消除控制信号和动作信号的延迟;
36、 (6)。
37、式(7)中代表电压的第个观测值,代表电压的平均值,代表电流的第i个观测值,代表电流的平均值。
38、 (7);
39、式(8)中代表转速的第个观测值,代表转速的平均值。
40、s4.2,将控制信号和动作信号输入基于卷积的神经网络中进行故障诊断。
41、本发明具有如下有益效果:
42、本发明提供的故障诊断系统将电气设备封装于外箱体内,外箱体由复合材料制成,该复合材料强度高、散热性好,具备优良耐热耐候性和耐冲击性能。故障诊断系统自带人力工程学提手,外出携带方便,采用高密度保护垫设计,机身抗摔能力强。内部密封性好,可有效阻止粉尘进入,同时具备优良的防水性能。因此更能适应复杂气候条件,故障诊断系统显示屏内置在故障诊断系统上箱体内部,采用tft lcd显示屏,分辨率为 1920x1080,可在yoz平面内实现小于或等于90°范围内的转动。故障诊断系统配备三个usb接口,可以用u盘导入或导出数据,也可以外接其它实验设备,提高了数据传输和实验效率。键盘为不锈钢材料,具有优良的防水、防尘和防腐蚀性能,灵敏度和稳定性较好。
43、利用本发明提供的故障诊断方法经实验室环境下的水池实验,系统能够稳定运行,并能取得较好数据集。
- 还没有人留言评论。精彩留言会获得点赞!