一种棱镜杆装置、地物碎部点测量方法、设备及介质与流程
本发明涉及测绘,尤其是涉及一种棱镜杆装置、地物碎部点测量方法、终端设备及计算机可读存储介质。
背景技术:
1、在现有技术中,城市复杂环境下进行碎部点测量的技术手段通常包括全站仪测量和rtk测量。其中,全站仪测量是通过已知点坐标进行待测碎部点坐标推算,rtk测量是通过对gnss卫星信号进行实时差分以获取待测碎部点的坐标。然而,在建筑物较为密集的场景下进行全站仪测量时,为了满足通视条件和碎部点的测量,通常需要在较短距离内布设多个测站,影响测量效率的同时,会造成较大的碎部点测量误差。而rtk测量容易受环境影响,在建筑物较为密集的场景下通常无法进行模糊度固定,从而无法准确地进行碎部点测量。
技术实现思路
1、本发明提供一种棱镜杆装置、地物碎部点测量方法、设备及介质,通过将基于惯性技术的九轴mems传感器与全站仪光电测距技术融合,使得地物碎部点测量不受测量环境的影响,无需满足棱镜与全站仪通视便能够实现地物碎部点的测量,有助于减少全站仪的布设数量,显著提高了地物碎部点的测量效率和测量精度。
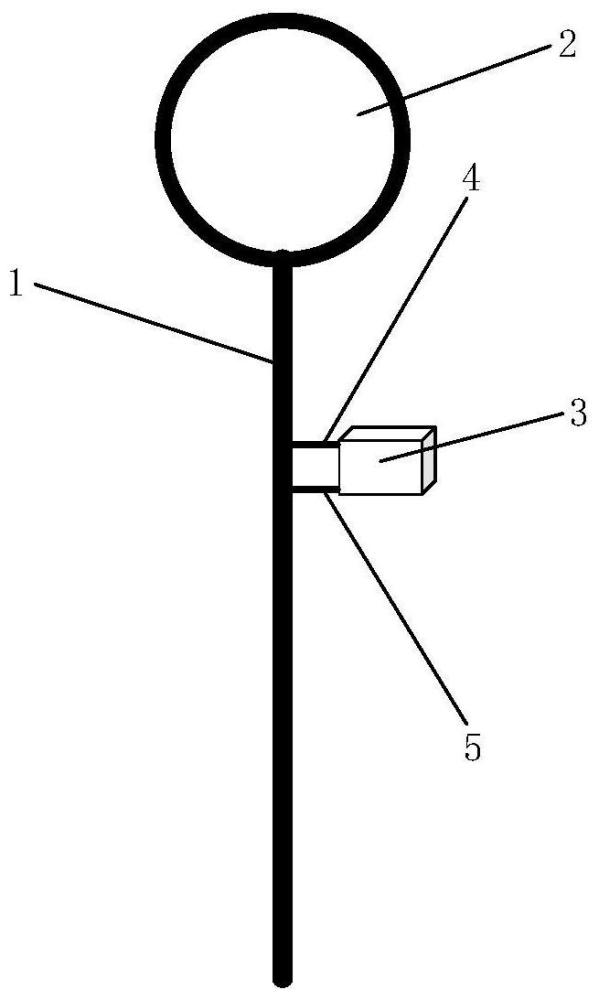
2、为了解决上述技术问题,本发明实施例第一方面提供一种棱镜杆装置,包括棱镜杆、棱镜和九轴mems传感器;
3、所述棱镜设于所述棱镜杆的顶部,所述九轴mems传感器设于所述棱镜杆上,所述九轴mems传感器包括三轴陀螺仪、三轴加速度计和三轴磁力计。
4、作为优选方案,所述棱镜杆装置还包括第一连接杆和第二连接杆;所述第一连接杆的一端和所述第二连接杆的一端均设于所述棱镜杆上,所述第一连接杆的另一端和所述第二连接杆的另一端均与所述九轴mems传感器连接。
5、作为优选方案,所述棱镜杆装置还包括电源模块;所述电源模块的供电端与所述九轴mems传感器的受电端连接。
6、本发明实施例第二方面提供一种地物碎部点测量方法,应用如第一方面任一项所述的棱镜杆装置,包括如下步骤:
7、利用六位置法对棱镜杆装置的九轴mems传感器进行惯性误差标定,确定若干标定惯性误差;
8、将所述棱镜杆装置设置于预设的已知控制点,基于所述已知控制点的位置信息,通过所述九轴mems传感器确定所述棱镜杆装置在所述已知控制点的姿态角,并将所述姿态角转化为初始姿态矩阵;
9、控制所述棱镜杆装置从所述已知控制点开始移动,通过所述九轴mems传感器检测移动过程中每一时刻的比力值、角速度值和磁感应强度值,并根据所述初始姿态矩阵、每一时刻的闭环校正后的比力值、角速度值和磁感应强度值,利用机械编排算法获取所述棱镜杆装置每一时刻的导航参数;其中,初始时刻的比力值、角速度值和磁感应强度值通过消除标定的惯性误差以实现闭环校正,非初始时刻的比力值、角速度值和磁感应强度值通过消除上一时刻的滤波估计的惯性误差以实现闭环校正;
10、根据所述九轴mems传感器的中心与所述棱镜杆装置的棱镜中心之间的距离,对每一时刻的导航参数进行校正,获得每一时刻的校正导航参数;
11、将每一时刻的校正导航参数误差和惯性误差作为状态量,以所述九轴mems传感器在所述已知控制点或待测碎部点静止时所获取的零速伪观测值、所述九轴mems传感器的三轴磁力计所计算的姿态角和所述已知控制点的位置信息作为观测值,利用扩展卡尔曼滤波算法获得每一时刻的状态矩阵、状态协方差矩阵和状态转移矩阵;
12、根据每一时刻的状态矩阵、状态协方差矩阵和状态转移矩阵,利用rts平滑滤波算法获得所述待测碎部点的位置信息。
13、作为优选方案,所述基于所述已知控制点的位置信息,通过所述九轴mems传感器确定所述棱镜杆装置在所述已知控制点的姿态角,具体包括如下步骤:
14、基于所述已知控制点的位置信息,通过所述九轴mems传感器的三轴加速度计确定所述棱镜杆装置在所述已知控制点的俯仰角和横滚角;
15、通过所述九轴mems传感器的三轴磁力计确定所述棱镜杆装置在所述已知控制点的磁偏角,并根据所述磁偏角获得地理坐标系的航向角;
16、根据所述俯仰角、所述横滚角和所述航向角,确定所述棱镜杆装置在所述已知控制点的姿态角。
17、作为优选方案,所述根据所述初始姿态矩阵、每一时刻的闭环校正后的比力值、角速度值和磁感应强度值,利用机械编排算法获取所述棱镜杆装置每一时刻的导航参数,具体包括如下步骤:
18、根据第k-1时刻的姿态矩阵、从第k-1时刻至第k时刻的导航坐标系变化矩阵和载体坐标系变化矩阵的乘积,获得第k时刻的姿态矩阵;其中,k为大于0的整数;当k=1时,第k-1时刻的姿态矩阵为所述初始姿态矩阵;
19、根据第k-1时刻的姿态矩阵、第k-1时刻的闭环校正后的比力值与角速度值、第k时刻的闭环校正后的比力值与角速度值,确定第k时刻的比力速度增量和哥氏速度增量,并根据第k-1时刻的速度值、第k时刻的比力速度增量和哥氏速度增量之和,获得第k时刻的速度值;
20、根据第k时刻的速度值和第k-1时刻的速度值,获取第k时刻的所述棱镜杆装置的位置信息;
21、根据所述棱镜杆装置每一时刻的姿态矩阵、速度值和位置信息,确定所述棱镜杆装置每一时刻的导航参数。
22、作为优选方案,所述利用六位置法对棱镜杆装置的九轴mems传感器进行惯性误差标定,确定若干标定惯性误差,具体包括如下步骤:
23、将所述九轴mems传感器的六个平面分别朝上并静止,获得一组三轴加速度计的输出值、一组三轴陀螺仪的输出值和一组三轴磁力计的输出值;
24、基于获得的所述三轴加速度计的输出值,利用高斯牛顿迭代法求解如下表达式,获得加速度计惯性误差:
25、
26、其中,θa表示加速度计惯性误差;k表示时刻;g表示当地重力加速度;h(as,θa)表示三轴加速度计的输出值经过误差矫正的表达式;所述加速度计惯性误差包括加速度计零偏误差、加速度计安装角误差和加速度计比例因子误差;
27、基于获得的所述三轴加速度计的输出值和所述三轴陀螺仪的输出值,利用高斯牛顿迭代法求解如下表达式,获得陀螺仪惯性误差:
28、
29、其中,θgry表示陀螺仪惯性误差;表示经过误差矫正的第k时刻的三轴加速度计的输出值;μk表示经过姿态变换的加速度值;所述陀螺仪惯性误差包括陀螺仪零偏误差、陀螺仪安装角误差和陀螺仪比例因子误差;
30、基于获得的所述三轴磁力计的输出值,利用高斯牛顿迭代法求解如下表达式,获得磁力计惯性误差:
31、
32、其中,θm表示磁力计惯性误差;m表示当地磁场强度;h(ms,θm)表示三轴磁力计的输出值经过误差矫正的表达式;所述磁力计惯性误差包括磁力计零偏误差、磁力计安装角误差和磁力计比例因子误差。
33、本发明实施例第三方面提供一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如第二方面任一项所述的地物碎部点测量方法。
34、本发明实施例第四方面提供一种计算机可读存储介质,所述计算机可读存储介质包括存储的计算机程序,其中,在所述计算机程序运行时控制所述计算机可读存储介质所在设备执行如第二方面任一项所述的地物碎部点测量方法。
35、相比于现有技术,本发明实施例的有益效果在于,通过将基于惯性技术的九轴mems传感器与全站仪光电测距技术融合,使得地物碎部点测量不受测量环境的影响,无需满足棱镜与全站仪通视便能够实现地物碎部点的测量,有助于减少全站仪的布设数量,显著提高了地物碎部点的测量效率和测量精度。
- 还没有人留言评论。精彩留言会获得点赞!