基于光线投影法的动态物体去除方法及相关装置与流程
本申请涉及定位,尤其涉及一种基于光线投影法的动态物体去除方法及相关装置。
背景技术:
1、动态物体去除技术是指通过计算机图形学和计算机视觉技术,从点云地图中自动移除掉不需要的动态物体,使得背景更加干净和自然。这项技术在许多应用领域都有广泛的应用,例如测绘、增强现实、安防监控等。而现有的动态物体去除技术对硬件要求高,处理速度慢。
技术实现思路
1、本实施例提供一种基于光线投影法的动态物体去除方法及相关装置,以解决上述背景技术中提到的问题。
2、第一方面,本申请提供一种基于光线投影法的动态物体去除方法,包括:
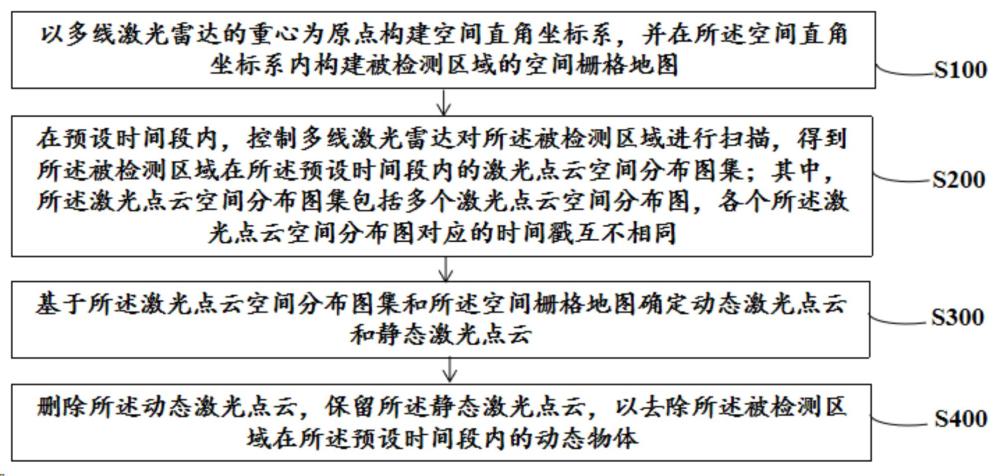
3、以多线激光雷达的重心为原点构建空间直角坐标系,并在所述空间直角坐标系内构建被检测区域的空间栅格地图;
4、在预设时间段内,控制多线激光雷达对所述被检测区域进行扫描,得到所述被检测区域在所述预设时间段内的激光点云空间分布图集;其中,所述激光点云空间分布图集包括多个激光点云空间分布图,各个所述激光点云空间分布图对应的时间戳互不相同;
5、基于所述激光点云空间分布图集和所述空间栅格地图确定动态激光点云和静态激光点云;
6、删除所述动态激光点云,保留所述静态激光点云,以去除所述被检测区域在所述预设时间段内的动态物体。
7、第二方面,本申请提供一种基于光线投影法的动态物体去除装置,包括:
8、构建模块,用于以多线激光雷达的重心为原点构建空间直角坐标系,并在所述空间直角坐标系内构建被检测区域的空间栅格地图;
9、控制模块,用于在预设时间段内,控制多线激光雷达对所述被检测区域进行扫描,得到所述被检测区域在所述预设时间段内的激光点云空间分布图集;其中,所述激光点云空间分布图集包括多个激光点云空间分布图,各个所述激光点云空间分布图对应的时间戳互不相同;
10、确定模块,用于基于所述激光点云空间分布图集和所述空间栅格地图确定动态激光点云和静态激光点云;
11、决策模块,用于删除所述动态激光点云,保留所述静态激光点云,以去除所述被检测区域在所述预设时间段内的动态物体。
12、第三方面,本申请提供一种终端设备,所述终端设备包括处理器、存储器以及存储在所述存储器上并可被所述处理器执行的计算机程序,其中,所述计算机程序被所述处理器执行时,实现如上所述的基于光线投影法的动态物体去除方法。
13、第四方面,本申请提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,其中,所述计算机程序被处理器执行时,实现如上所述的基于光线投影法的动态物体去除方法。
14、本申请提供了一种基于光线投影法的动态物体去除方法及相关装置,所述方法包括以多线激光雷达的重心为原点构建空间直角坐标系,并在所述空间直角坐标系内构建被检测区域的空间栅格地图;在预设时间段内,控制多线激光雷达对所述被检测区域进行扫描,得到所述被检测区域在所述预设时间段内的激光点云空间分布图集;其中,所述激光点云空间分布图集包括多个激光点云空间分布图,各个所述激光点云空间分布图对应的时间戳互不相同;基于所述激光点云空间分布图集和所述空间栅格地图确定动态激光点云和静态激光点云;
15、删除所述动态激光点云,保留所述静态激光点云,以去除所述被检测区域在所述预设时间段内的动态物体。该方法不需要复杂的数据处理过程就能够去除被检测区域内的动态物体,降低了动态物体去除对硬件的要求,易于实施,提高了动态物体去除的效率。
技术特征:
1.一种基于光线投影法的动态物体去除方法,其特征在于,包括:
2.根据权利要求1所述的基于光线投影法的动态物体去除方法,其特征在于,所述基于所述激光点云空间分布图集和所述空间栅格地图确定动态激光点云和静态激光点云,包括:
3.根据权利要求2所述的基于光线投影法的动态物体去除方法,其特征在于,所述基于所述激光点云空间分布地图集确定所述空间栅格地图内的各个栅格被激光击中的次数和被激光击穿的次数,包括:
4.根据权利要求1所述的基于光线投影法的动态物体去除方法,其特征在于,所述基于所述激光点云空间分布图集和所述空间栅格地图确定动态激光点云和静态激光点云,包括:
5.根据权利要求2或4所述的基于光线投影法的动态物体去除方法,其特征在于,所述方法还包括:
6.一种基于光线投影法的动态物体去除装置,其特征在于,包括:
7.一种终端设备,其特征在于,所述终端设备包括处理器、存储器以及存储在所述存储器上并可被所述处理器执行的计算机程序,其中,所述计算机程序被所述处理器执行时,实现如权利要求1至5中任一项所述的基于光线投影法的动态物体去除方法。
8.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,其中,所述计算机程序被处理器执行时,实现如权利要求1至5中任一项所述的基于光线投影法的动态物体去除方法。
技术总结
本申请涉及定位技术领域,提供了基于光线投影法的动态物体去除方法及相关装置,该方法包括以多线激光雷达的重心为原点构建空间直角坐标系,并在所述空间直角坐标系内构建被检测区域的空间栅格地图;在预设时间段内,控制多线激光雷达对所述被检测区域进行扫描,得到所述被检测区域在所述预设时间段内的激光点云空间分布图集;基于所述激光点云空间分布图集和所述空间栅格地图确定动态激光点云和静态激光点云;删除所述动态激光点云,保留所述静态激光点云,以去除所述被检测区域在所述预设时间段内的动态物体。该方法不需要复杂的数据处理过程就能够去除被检测区域内的动态物体,降低了动态物体去除对硬件的要求。
技术研发人员:邹俊逸
受保护的技术使用者:深圳市其域创新科技有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!