一种基于预测的动态目标拦截路径规划方法
本发明涉及一种基于预测的动态目标拦截路径规划方法,属于动态目标拦截,特别适用于大量动态目标,并且多个拦截器的情况。
背景技术:
1、在军事作战或公安行动中,通常面临需要拦截大量敌方目标的情况。不管是敌方目标向我方袭来,还是敌方目标四散溃逃,都需要我方拦截器迅速制定拦截路径,对敌方进行拦截阻击。动态目标快速拦截路径规划问题广泛存在于这些作战行动任务中。
2、然而,该问题存在一些挑战性。首先,目标在移动,导致制定好的拦截顺序随着拦截过程的进行,不是最优路径,不能达成快速拦截的目的;其次,我方有多个拦截器,完成同时快速拦截的目标需要使拦截器中最长的路径最小化。
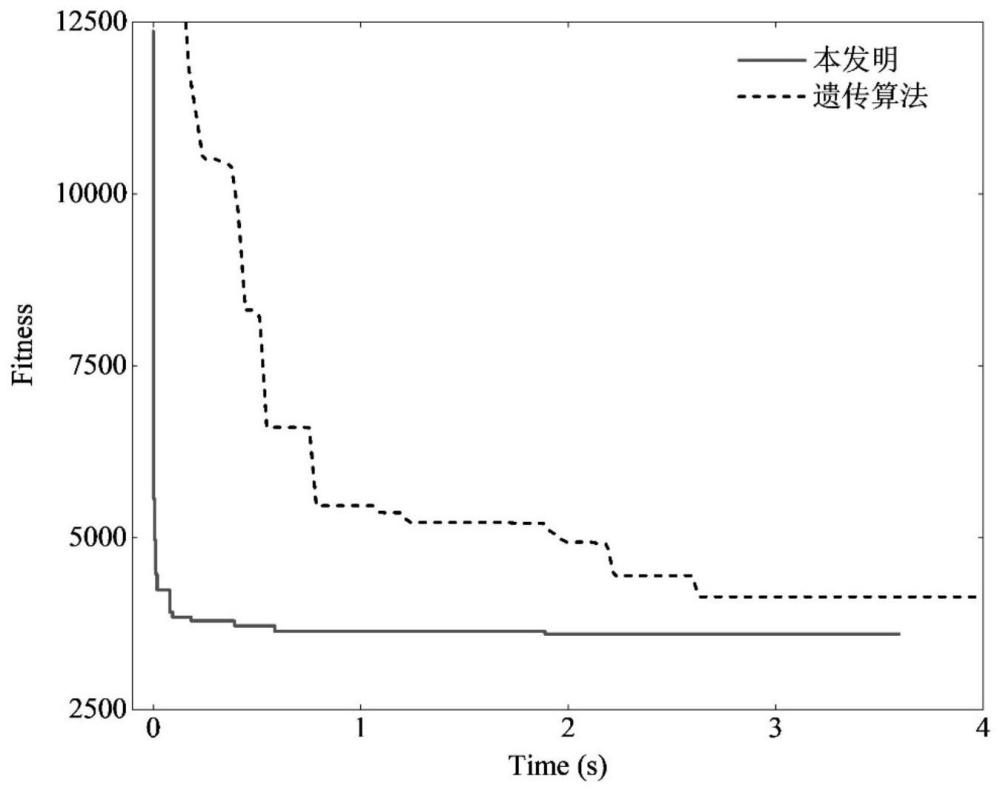
3、针对动态目标快速拦截路径规划问题,目前的解决方案大多采用遗传算法、模拟退火等启发式方法来规划路径,但这些传统方法规划出来的路径离最优路径差距较大,当拦截目标数量较多时容易陷入局部最优,规划效果欠佳,并且规划时间较长。一些解决方案中引入了预测技术来应对该拦截问题的动态特性,但没有考虑多个拦截器的情况。
技术实现思路
1、本发明的技术解决问题是:克服现有技术的不足提出一种基于预测的动态目标拦截路径规划方法,该方法以贪婪的方式把最近的目标分配给拦截器作为初始解,初始化当前温度和算子权重,自适应地选择破环算子和修复算子对解进行更新迭代,引入运动预测模块获取解的适应度判断是否接受新解,根据新解的性能更新算子权重,迭代至当前温度降到最终温度时终止,获得最终的优化结果,实现动态目标拦截路径的规划,该方法能够有效地处理该拦截问题的动态特性,提高拦截路径规划效果,并且在有大量动态目标和多个拦截器的情况下,能够快速得到满意的结果,有效提高了拦截路径规划效率。
2、本发明的技术解决方案为:
3、一种基于预测的动态目标拦截路径规划方法,该方法所针对的动态目标拦截任务中包含n个移动目标和m个拦截器,以m个拦截器拦截目标的路径中最长路径作为适应度,该方法的步骤包括:
4、步骤一、依次给m个拦截器分配一个最近的目标,直到n个目标全部被分配,则所有拦截器拦截目标的节点顺序组合即为初始解,初始化当前温度tc、破环算子权重wd和修复算子权重wr;
5、步骤二、根据运动预测获取步骤一得到的初始解的适应度,并将该初始解作为全局最优解;
6、步骤三、根据破环算子权重wd和修复算子权重wr,通过轮盘赌的方式选择破环算子和修复算子,对当前解进行破环和修复操作进行解的更新;
7、步骤四、根据运动预测获取更新后的解的适应度f',与当前解的适应度f和全局最优解的适应度进行比较,决定是否接受新解和更新全局最优解;
8、步骤五、把适应度较好的精英解存入一个50容量的存档中,当有新的精英解出现时,替换掉存档中最差的精英解,然后根据新解的性能更新步骤三中被选择的算子的权重;
9、步骤六、对当前温度进行冷却至αtc,α为冷却速率,判断是否达到最终温度t0,若αtc小于等于t0,则终止迭代,以全局最优解作为最终的拦截路径规划方案,否则返回步骤三,进行下一次迭代。
10、进一步地,步骤二和步骤四中引入运动预测模块获取解的适应度的方法具体包括如下步骤:
11、第1步,根据当前时刻拦截器的位置和速度大小以及下一个要拦截目标的位置、速度大小和运动方向,预测出和下一个拦截目标相遇的位置,也就是拦截点;
12、第2步,每到一个拦截点,更新拦截器和所有目标的位置,再预测出下一个目标拦截点,按拦截顺序依次得到每一个拦截点,最后将所有拦截点之间的距离累加,即为该拦截器拦截目标的路径长度;
13、第3步,对m个拦截器进行第1步和第2步,得到所有拦截器拦截目标的路径长度,其中最长路径即为该解的适应度;
14、进一步地,步骤三中通过破环和修复算子对解进行更新的方法具体包括如下步骤:
15、第一步,按以下公式确定该解将被破坏的节点数量nd:
16、nd=nmax-(nmax-nmin)(ic/i)
17、其中,nmax和nmin分别为最大和最小破坏数量,ic为当前迭代数,i为总迭代次数;
18、第二步,通过轮盘赌的方式从下列四个破坏算子中选择一个对解进行破坏:
19、随机删除算子,在解中随机选择nd个节点,对其进行删除;
20、连续删除算子,随机选择一个起始位置,然后连续删除后面nd个节点;
21、最差距离删除算子,对第2步得到的所有拦截点间的距离进行降序排列,删除前面nd个最差距离的后节点;
22、最长路径删除算子,对m个拦截器路径中的最长路径进行操作,即随机将最长路径中的一个节点移动到最短路径中,其余nd-1个节点进行随机删除;
23、第三步,通过轮盘赌的方式从下列四个修复算子中选择一个对解进行修复,得到新解:
24、随机修复算子,将被删除的节点随机填入到空出的位置;
25、滑移修复算子,将被删除的节点填入到后一个空出的位置;
26、最短距离修复算子,首先确定待修复位置上一个拦截点的时刻,更新此时刻所有节点的位置,将此时距离上一个拦截点最近的被删除节点填入到待修复位置,然后预测该节点对应的拦截点,更新时间序列,再依次修复下一个位置;
27、存档修复,从步骤五的精英解存档中随机选择一个精英解,将对应的节点填入到空出的位置,然后修改重复节点。
28、有益效果
29、本发明针对军事作战和公安行动中快速拦截敌方动态目标的实际任务需求,以最小化最长拦截路径为目标,在规划拦截路径过程,引入运动预测模块获取解的适应度,能够有效地处理该拦截问题的动态特性。在迭代过程中,自适应地选择破环算子和修复算子对解进行更新,以在较大的邻域中搜索到更优的拦截路径,提高了拦截路径规划效果,加快了规划速度。在有大量动态目标和多个拦截器的情况下,能够快速得到满意的结果,有效提高了拦截路径规划效率。
技术特征:
1.一种基于预测的动态目标拦截路径规划方法,其特征在于该方法所针对的动态目标拦截任务中包含n个移动目标和m个拦截器,以m个拦截器拦截目标的路径中最长路径作为适应度,该方法的步骤包括:
2.根据权利要求1所述的一种基于预测的动态目标拦截路径规划方法,其特征在于:
3.根据权利要求1所述的一种基于预测的动态目标拦截路径规划方法,其特征在于:
技术总结
本发明涉及一种基于预测的动态目标拦截路径规划方法,属于动态目标拦截技术领域,特别适用于大量动态目标,并且多个拦截器的情况。本发明在规划拦截路径过程中,引入运动预测模块获取解的适应度,能够有效地处理该拦截问题的动态特性。本发明在迭代过程中,自适应地选择破环算子和修复算子对解进行更新,以在较大的邻域中搜索到更优的拦截路径,提高了拦截路径规划效果,加快了规划速度。在有大量动态目标和多个拦截器的情况下,本发明能够快速得到满意的结果,有效提高了拦截路径规划效率。
技术研发人员:陈晨,张昭,张云天,丁玉隆,全威,陈杰
受保护的技术使用者:北京理工大学
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!