一种定位方法、系统及电子设备与流程
本申请属于定位,尤其涉及一种定位方法、系统及电子设备。
背景技术:
1、轨道式机器人是一种沿着已有轨道进行移动和执行任务的机器人,随着相关技术的日益发展,轨道式机器人已在各个领域被用于代替或辅助人工巡检。
2、而为了保障轨道式机器人工作的顺利进行,准确定位机器人的位置是十分重要的。然而可选的对机器人进行定位的方法往往存在准确度较低、稳定性较差的问题。
技术实现思路
1、有鉴于此,本申请实施例提供了一种定位方法、系统及电子设备,能够提高对机器人定位的准确度。
2、本申请实施例的第一方面提供了一种定位方法,应用于轨道式机器人,轨道式机器人上设置有控制器、微动开关、接近开关以及里程计,轨道式机器人在设置有零位块、多个校准片的工字轨上运行,所述方法包括:
3、在机器人正式运行过程中经过校准片时,响应于接近开关生成的第二里程校准信号,获取当前校准片对应的第二里程信息。
4、根据当前校准片对应的第二里程信息,确定当前校准片对应的第一里程信息。
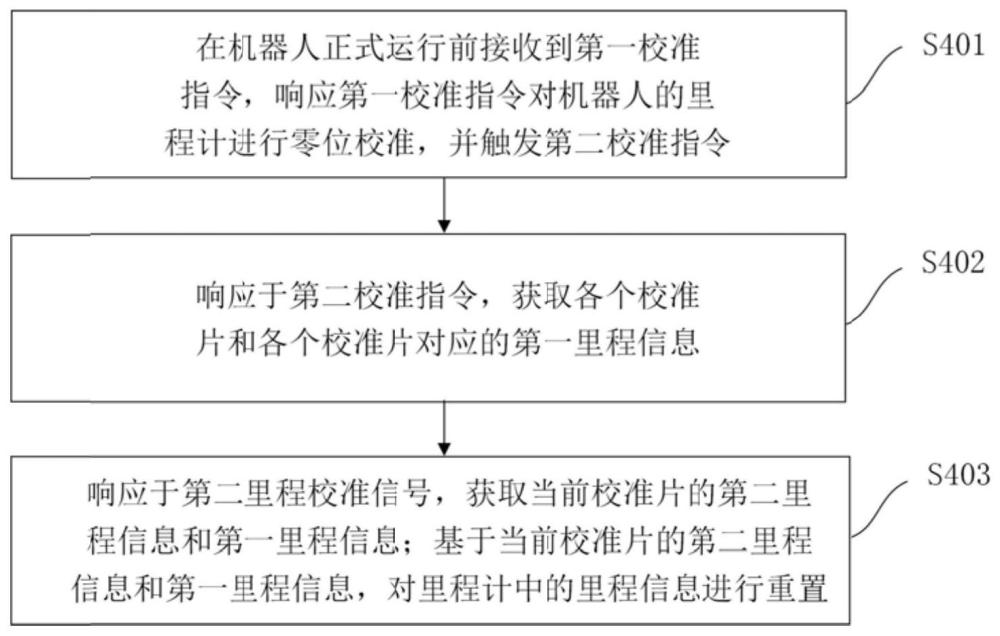
5、基于当前校准片对应的第一里程信息和当前校准片对应的第二里程信息,对里程计中的里程信息进行重置。
6、在第一方面的第一种可能的实现方式中,在方法之前还包括:
7、在机器人正式运行前接收到第一校准指令,响应第一校准指令对机器人的里程计进行零位校准,并触发第二校准指令。
8、响应于第二校准指令,机器人向终点方向移动。
9、在机器人向终点方向移动过程中经过校准片时,响应于接近开关生成的第一里程校准信号,获取各个校准片和各个校准片对应的第一里程信息。
10、基于上述第一方面的第一种可能的实现方式,在第一方面的第二种可能的实现方式中,响应第一校准指令对机器人的里程计进行零位校准,包括:
11、响应于第一校准指令,机器人向起点方向移动。
12、在机器人向起点移动过程中接触零位块时,响应于微动开关生成的零位校准信号,机器人停止移动,并检测零位校准信号的持续时长是否达到第一预设时长。
13、在零位校准信号的持续时长达到第一预设时长时,机器人执行预设动作,并判断零位校准信号是否发生预设变化。
14、在零位校准信号发生预设变化时,将里程计中的里程信息重置为零。
15、在第一方面的第三种可能的实现方式中,根据当前校准片对应的第一里程信息和当前校准片对应的第二里程信息,对里程计中的里程信息进行重置,包括:
16、确定里程校准差值,里程校准差值为当前校准片对应的第一里程信息和当前校准片对应的第二里程信息之间的差值。
17、根据里程校准差值,判断是否满足预设重置里程条件。预设重置里程条件为校准信号异常次数小于预设次数,校准信号异常次数根据里程校准差值确定。
18、在满足预设重置里程条件时,对里程计中的里程信息进行重置。
19、基于上述第一方面的第三种可能的实现方式,在第一方面的第四种可能的实现方式中,在满足预设重置里程条件时,对里程计中的里程信息进行重置,包括:
20、在满足预设重置里程条件时,获取机器人的运动方向、运动速度。
21、根据机器人的运动方向、运动速度以及当前校准片对应的第一里程信息,对里程计中的里程信息进行重置。
22、基于上述第一方面的第四种可能的实现方式,在第一方面的第五种可能的实现方式中,在满足预设重置里程条件时,对里程计中的里程信息进行重置,还包括:
23、确定当前响应的第二里程校准信号所对应的接近开关。
24、根据机器人的运动方向、运动速度、当前校准片对应的第一里程信息以及当前响应的第二里程校准信号所对应的接近开关,对里程计中的里程信息进行重置。
25、在第一方面的第六种可能的实现方式中,在响应于接近开关生成的第二里程校准信号之前包括:
26、采用预设过滤方式对第二里程校准信号进行过滤。
27、本申请实施例通过在机器人正式运行前和正式运行过程中都对里程计进行了修正,得到更准确的里程信息,从而可以提高对机器人定位的精准度。
28、本申请实施例的第二方面提供了一种定位系统,包括:
29、工字轨、零位块、限位块、若干个校准片、微动开关、接近开关、控制器、行走轮与里程计。
30、其中,零位块、限位块、和若干个校准片安装于工字轨上。微动开关、接近开关、控制器、行走轮与里程计安装于机器人的本体上。限位块安装于工字轨的末端,用于防止机器人冲出轨道。校准片安装于工字轨底部。零位块安装于限位块前方。零位块与机器人的微动开关构成零位校准的触发源。校准片与机器人的微动开关构成里程校准的触发源。
31、本申请实施例的第三方面提供了一种定位装置,包括:
32、第一处理模块,用于在机器人正式运行过程中经过校准片时,响应于接近开关生成的第二里程校准信号,获取当前校准片对应的第二里程信息。
33、第二处理模块,用于根据当前校准片对应的第二里程信息,确定当前校准片对应的第一里程信息。
34、第三处理模块,用于基于当前校准片对应的第一里程信息和当前校准片对应的第二里程信息,对里程计中的里程信息进行重置。
35、本申请实施例的第四方面提供了一种电子设备,所述电子设备包括存储器、处理器,所述存储器上存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时,使得电子设备实现如上述第一方面中任一项所述定位方法的步骤。
36、本申请实施例的第五方面提供了一种计算机可读存储介质,包括:存储有计算机程序,所述计算机程序被处理器执行时,使得电子设备实现如上述第一方面中任一项所述定位方法的步骤。
37、可以理解的是,上述第二方面至第五方面的有益效果可以参见上述第一方面中的相关描述,在此不再赘述。
技术特征:
1.一种定位方法,其特征在于,应用于轨道式机器人,所述轨道式机器人上设置有控制器、微动开关、接近开关以及里程计,所述轨道式机器人在设置有零位块、多个校准片的工字轨上运行,所述方法包括:
2.根据权利要求1所述的定位方法,其特征在于,在所述方法之前还包括:
3.根据权利要求2所述的定位方法,其特征在于,所述响应所述第一校准指令对所述机器人的所述里程计进行零位校准,包括:
4.根据权利要求1所述的定位方法,其特征在于,所述基于所述当前校准片对应的第一里程信息和所述当前校准片对应的第二里程信息,对所述里程计中的里程信息进行重置,包括:
5.根据权利要求4所述的定位方法,其特征在于,所述在满足所述预设重置里程条件时,对里程计中的里程信息进行重置,包括:
6.根据权利要求5所述的方法,其特征在于,所述方法还包括:
7.根据权利要求1所述的定位方法,其特征在于,在所述响应于所述接近开关生成的第二里程校准信号之前包括:
8.一种定位系统,其特征在于,所述定位系统包括:
9.一种电子设备,其特征在于,所述电子设备包括存储器、处理器,所述存储器上存储有可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现根据权利要求1至7任一项所述方法的步骤。
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现根据权利要求1至7任一项所述方法的步骤。
技术总结
本申请提供了定位方法、系统及电子设备,适用于机器人定位技术领域,该方法应用于轨道式机器人,该方法包括:在机器人正式运行过程中经过校准片时,响应于接近开关生成的第二里程校准信号,获取当前校准片对应的第二里程信息;根据校准片对应的第二里程信息,确定当前校准片对应的第一里程信息;根据校准片对应的第一里程信息和当前校准片对应的第二里程信息,对里程计中的里程信息进行重置。本申请实施例在机器人正式运行前和正式运行过程中都对里程计进行了修正,可以得到更准确的里程信息,从而可以提高对机器人定位的精准度。
技术研发人员:陈伟,彭志远,赵松璞,徐劲莉,敬高磊,程浩
受保护的技术使用者:深圳市朗驰欣创科技股份有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!