一种双基SAR系统的欺骗干扰机失效区域计算方法及系统
本发明涉及雷达干扰对抗领域,具体涉及双基sar系统的欺骗干扰机失效区域计算方法及系统。
背景技术:
1、合成孔径雷达(syntheticaperture radar,sar)利用大时间带宽积信号的脉冲压缩技术和合成孔径技术可以分别获得距离向和方位向的高分辨率。它具有全天时、全天候和高分辨对地观测的能力,已经被广泛地应用于各种领域。与此同时,针对sar的干扰技术研究也在同步进行,相应的干扰技术经过数十年的发展研究已经取得了不错的成果,其中转发式欺骗干扰可以在成像场景的设定区域内形成虚假目标,实现对真实目标的保护,且干扰信号功率与真实场景回波功率水平相近,在信号域难以辨识欺骗干扰信号,对sar的成像结果影响较大。
2、如何定量衡量sar系统的抗干扰性能是sar干扰与对抗领域的一个重要问题,传统的抗干扰性能评价体系是计算信号处理后的干信比或基于雷达成像之后通过计算点目标的峰值旁瓣比、积分旁瓣比、主旁瓣增益比、方差等指标进行评估。与传统的单基sar相比,双基sar体制的发射机和接收机分置在不同的平台上,接收机处于无源接收的电磁静默状态,欺骗干扰机主要针对发射机进行信号调制转发,干扰信号进入接收机后会产生干扰成像中心位置偏移与方位向散焦的问题,干扰信号的成像指标虽然恶化,但仍会在成像场景中覆盖部分场景区域,进而导致后续的目标检测及识别过程可能产生问题,在一定程度上达到了干扰双基sar系统的目的,此时如果仍采用传统的抗干扰评价指标进行抗干扰性能评估,则会将干扰机的有效干扰视为无效干扰,从而对双基sar系统的抗干扰性能评估带来不利影响。此外,欺骗干扰机在不同空间位置上会对双基sar系统产生不同的干扰影响,但欺骗干扰机的精确位置往往是未知的,因此针对固定位置的干扰机进行双基sar抗干扰性能分析也存在评估结果的适应性较低的问题。
技术实现思路
1、本发明的目的在于提供一种高效的双基sar系统的欺骗干扰机失效区域计算方法及系统。
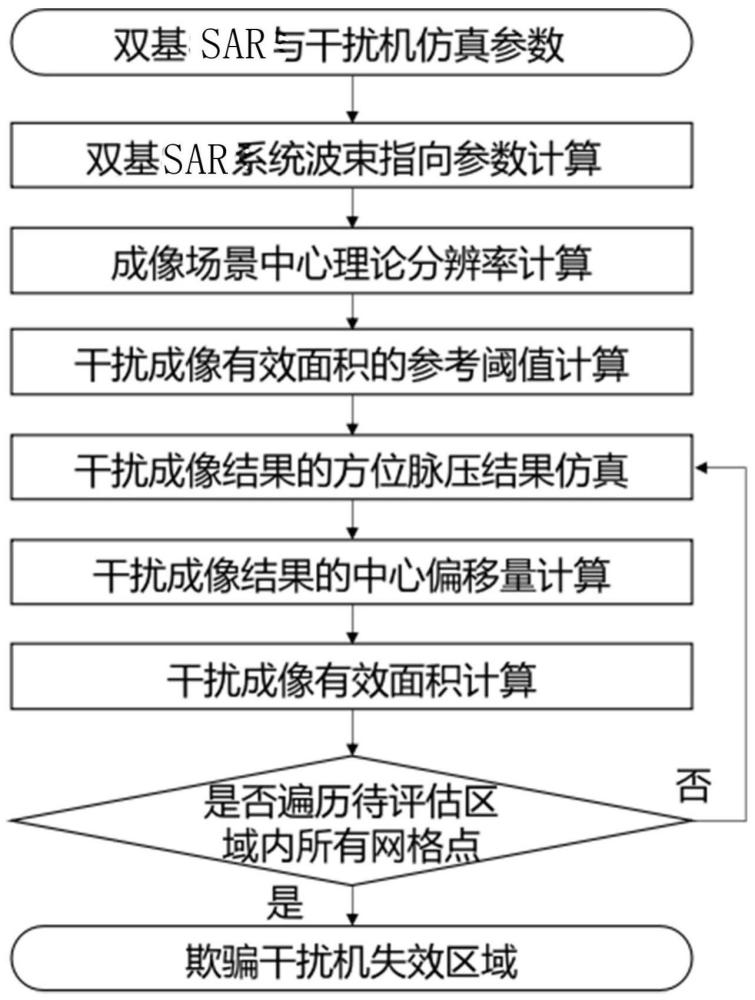
2、为解决上述技术问题,本发明提供一种双基sar系统的欺骗干扰机失效区域计算方法,包括以下步骤:
3、获取双基sar系统的仿真参数;根据双基sar系统的仿真参数,计算得到运动过程中的波束指向参数;
4、获取双基sar系统的天线波束参数;根据波束指向参数和天线波束参数,以成像场景中心处为参考点,计算得到成像场景的理论分辨率参数;
5、根据波束指向参数和理论分辨率参数,计算得到干扰成像有效面积的参考阈值;
6、获取干扰机的天线波束宽度参数、干扰机所在的待评估区域在xy方向的成像网格划分个数与宽度参数;根据干扰机的天线波束宽度参数、干扰机所在的待评估区域在xy方向的成像网格划分个数与宽度参数,计算得到实际干扰的方位向脉压结果;
7、计算成像场景中心处的虚假目标点的实际成像中心坐标偏移量;
8、获取一维行向量数据和一维列向量数据;根据一维行向量数据、一维列向量数据、实际干扰的方位向脉压结果和实际成像中心坐标偏移量,计算得到实际干扰成像结果;
9、根据实际干扰成像结果和干扰成像有效面积的参考阈值,计算得到干扰成像有效面积;
10、根据干扰成像有效面积,得到双基sar系统的抗干扰性能。
11、优选地,所述双基sar系统的仿真参数包括收发平台的零时刻位置矢量参数、收发平台的平飞速度矢量参数和成像场景中心位置矢量参数;波束指向参数包括收发平台的天线波束指向在运动过程中的斜视角与俯仰角;根据双基sar系统的仿真参数,计算得到运动过程中的波束指向参数,具体包括以下步骤:
12、在参考坐标系下,表示发射平台的零时刻位置矢量,表示接收平台的零时刻位置矢量,表示场景中心处点目标p的位置矢量,表示发射平台的运动速度矢量,表示接收平台的运动速度矢量;
13、利用公式(1)、(2)计算发射平台与接收平台的偏航角规定偏航角为飞行方向与y轴的夹角,y轴正方向为0°,俯视逆时针为正:
14、
15、
16、其中,atan2(y,x)表示考虑了y与x的符号的y/x反正切值,表达式如公式所示:
17、
18、设方位向重频为prf、方位向采样点数na,根据双基sar系统的收发平台运动过程,构造由发射平台与接收平台的位置坐标矩阵维数均为3×na,表达式为:
19、
20、
21、利用公式(6)对斜距矢量进行坐标系变换,得到载体坐标系下的斜距矢量表达式为:
22、
23、利用公式计算载体坐标系下的发射平台波束斜视角俯仰角维数均为1×na,表达式为:
24、
25、
26、利用公式(9)计算参考坐标系下的零时刻发射平台波束指向方向的单位向量:
27、
28、利用公式(10)计算参考坐标系下的接收平台在运动过程中发射波束指向地面的矢量矩阵维数为3×na:
29、
30、利用公式(11)计算矢量矩阵在载体坐标系中的矢量矩阵
31、
32、利用公式(12)、(13)计算载体坐标系下的接收平台波束斜视角俯仰角维数均为1×na,表达式为:
33、
34、
35、优选地,所述天线波束参数包括发射平台天线的方位向波束宽度与距离向波束宽度接收平台天线的方位向波束宽度与距离向波束宽度根据波束指向参数和天线波束参数,以成像场景中心处为参考点,计算得到成像场景的理论分辨率参数,具体包括以下步骤:
36、表示发射平台天线的方位向波束宽度与距离向波束宽度,表示接收平台天线的方位向波束宽度与距离向波束宽度;
37、利用公式计算双基sar系统的合成孔径时间ta:
38、
39、其中,||·||表示向量求模运算;
40、利用公式(15)、(16)计算得到由双基sar系统的发射平台和接收平台指向成像场景中心点方向的单位矢量和
41、
42、
43、利用公式计算得到双基sar系统的收发平台相对成像场景中心点的旋转速度矢量和
44、
45、
46、其中,向量之间的“·”符号表示两个向量之间的点积运算;
47、设雷达发射信号波长为λ,利用公式(19)、(20)计算得到成像场景中心处的等距离和梯度矢量与等多普勒频率梯度矢量
48、
49、
50、利用公式(21)至公式(24)分别计算梯度矢量和的方位角θr、θa与俯仰角φr、φa:
51、
52、
53、
54、
55、设雷达信号带宽为br,利用公式(25)、(26)分别计算距离旁瓣分辨率的大小ρr与方向方位旁瓣分辨率的大小ρa与方向
56、
57、
58、优选地,根据波束指向参数和理论分辨率参数,计算得到干扰成像有效面积的参考阈值,具体包括以下步骤:
59、根据波束指向参数和理论分辨率参数,以成像场景中心处的目标点为参考点,计算得到目标点处理想回波信号的方位向相位函数,并逐脉冲计算理想回波信号的功率,对方位向相位函数进行包络加权,得到包络加权结果;
60、对包络加权结果进行匹配滤波处理得到脉压结果,从脉压结果中获取干扰成像有效面积的参考阈值。
61、优选地,根据波束指向参数和理论分辨率参数,计算得到干扰成像有效面积的参考阈值,具体包括以下步骤:
62、利用公式(27)、(28)计算得到成像场景中心点处的多普勒调频率参数多普勒三阶参数与多普勒带宽bd:
63、
64、
65、bd=|fdrta+fdtta2| (29)
66、设方位向重频为prf,利用公式(30)计算得到成像场景中心点的理想回波信号的方位向相位函数,表示为1×na维的复数数据sref,即
67、
68、其中,round(·)函数为四舍五入取整运算
69、根据双基sar系统的收发平台运动过程,构造由发射平台与接收平台指向成像场景中心点处的斜距矢量维数均为3×na,表达式为:
70、
71、
72、利用公式(33)、(34)分别对斜距矢量矩阵与进行坐标系变换,得到载体坐标系下的斜距矢量矩阵与维数均为3×na,表达式为:
73、
74、
75、利用公式(35)至公式(38)分别计算斜距矢量矩阵与各列矢量对应的斜视角与俯仰角维数均为1×na:
76、
77、
78、
79、
80、利用公式(39)、(40)分别计算成像场景中心点在发射平台、接收平台的天线方向图中的加权系数ftp、frp,维数均为1×na:
81、
82、
83、设雷达信号发射功率为pt,发射平台的天线增益为gt,接收平台的天线增益为gr,利用公式(41)计算得到回波功率pref,维数为1×na:
84、
85、利用公式(42)计算得到匹配滤波结果so,维数为1×na:
86、so[]=ifft{fft{sref[]·ref[]}·fft*{sref[n]}} (42)
87、其中,“(·)*”表示取共轭运算;
88、对匹配滤波结果so进行一维傅里叶插值处理,一维插值倍数为no,取不小于16的2的整数次幂,得到维数为nano的插值后的匹配滤波结果,并求取模值得到幅值数据维数为1×nano;
89、逐点搜索幅值数据的峰值记为ap,并对ap按照从大到小的顺序进行排序得到排序后的峰值数据
90、逐点搜索排序后的峰值数据记录第一次峰值数据小于的索引为ip,设距离向信号采样频率为fs,发射信号时宽为tp,利用公式(43)计算得到干扰成像有效面积的参考阈值aref:
91、
92、优选地,根据干扰机的天线波束宽度参数、干扰机所在的待评估区域在xy方向的成像网格划分个数与宽度参数,计算得到实际干扰的方位向脉压结果,具体包括以下步骤:
93、设干扰机所在的待评估区域为x方向nexlex米、y方向neyley米的长方形区域,待评估区域的中心坐标为[x0,y0,0],将待评估区域均匀划分为nexney个lex米×ley米大小的网格,则第ie行第je列的网格点中心的坐标可通过公式(44)表示为:
94、
95、获取干扰机系统的仿真参数,其中干扰机位置坐标设为待评估区域的第ie行第je列的网格点中心坐标,天线方向图参数按照sinc函数设置,具体如下所示;在参考坐标系下,表示干扰机的位置矢量,表示干扰机天线的方位向波束宽度与距离向波束宽度;
96、利用公式(45)、(46)计算得到设定在成像场景中心点处的虚假目标点的实际干扰信号的多普勒调频率参数与多普勒三阶参数
97、
98、
99、利用公式(47)得到目标点处理想回波信号的方位向相位函数,表示为1×na维的复数数据sj,即
100、
101、根据双基sar系统的收发平台运动过程,构造由发射平台与接收平台指向干扰机处的斜距矢量矩阵与维数均为3×na,表达式为:
102、
103、
104、利用公式(50)、(51)分别对斜距矢量矩阵与进行坐标系变换,得到载体坐标系下的斜距矢量矩阵与维数均为3×na,表达式为:
105、
106、
107、利用公式(52)至公式(55)分别计算斜距矢量矩阵和各列矢量对应的斜视角与俯仰角维数均为1×na:
108、
109、
110、
111、
112、利用公式(56)、(57)分别计算斜距矢量矩阵和的各列矢量斜视角之差δθj与俯仰角之差δφj,维数均为1×na:
113、
114、
115、利用公式(58)至公式(60)分别计算干扰机在发射平台、接收平台的天线方向图中的加权系数ftj、frj和接收平台在干扰机的天线方向图中的加权系数fjr:
116、
117、
118、
119、利用公式(61)计算回波功率pj,维数为1×na:
120、
121、利用公式(62)计算得到实际干扰的方位向脉压结果sa如下:
122、sa[]=|ifft{fft{sj[]·j[]}·fft*{sref[n]}}|(62)。
123、优选地,计算成像场景中心处的虚假目标点的实际成像中心坐标偏移量,具体包括以下步骤:
124、利用公式(64)计算得到斜距历程常数项误差δr与多普勒频率误差δf:
125、
126、
127、利用公式(65)、(66)计算得到成像场景中心处的虚假目标点的实际成像中心坐标的偏移量为δx和δy:
128、
129、
130、优选地,获取一维行向量数据和一维列向量数据;根据一维行向量数据、一维列向量数据、实际干扰的方位向脉压结果和实际成像中心坐标偏移量,计算得到实际干扰成像结果,具体包括以下步骤:
131、设成像场景为npx×npy维大小的网格区域,每个网格大小为lpx米×lpy米,并利用公式(67)计算得到距离向脉压结果维数为1×npx:
132、
133、取实际干扰的方位向脉压结果sa的数据,通过公式(68)计算得到一维插值重采样后的方位向脉压结果维数为1×npy:
134、
135、其中,索引m与插值系数α的通过公式(69)、(70)进行计算,表示向下取整运算:
136、
137、
138、通过方位向脉压结果转置后与距离向脉压结果相乘得到二维矩阵数据并将二维矩阵数据按照旁瓣方向角度与实际成像中心坐标的偏移量映射至二维矩阵数据sjam,维数为npy×npx,即:
139、
140、其中,矩阵索引之间的映射关系按照公式(72)计算:
141、
142、统计二维矩阵数据sjam中高于干扰成像有效面积参考阈值aref的成像网格数量,并乘以单个网格的面积大小即为干扰机位于待评估场景网格点(ie,je)处的干扰成像有效面积jarea[ie,je],即:
143、jarea[ie,je]=lpxlpy·card({(i,j)|sjam[i,j]>aref}) (73)
144、其中,card(a)表示集合a的元素个数。
145、优选地,根据实际干扰成像结果和干扰成像有效面积的参考阈值,计算得到干扰成像有效面积,具体包括以下步骤:
146、统计二维矩阵数据sjam中高于干扰成像有效面积参考阈值aref的成像网格数量,并乘以单个网格的面积大小即为干扰机位于待评估场景网格点(ie,je)处的干扰成像有效面积jarea[ie,je],即:
147、jarea[ie,je]=lpxlpy·card({(i,j)|sjam[i,j]>aref}) (73)
148、其中,card(a)表示集合a的元素个数。
149、与现有技术相比,本发明的有益效果为:
150、本发明从欺骗干扰信号在双基sar系统成像结果中的干扰成像有效面积角度考虑,提出了一种双基sar系统的欺骗干扰机失效区域计算方法。本发明不需要进行回波仿真与成像处理,通过系统构型、天线参数,即可得到待评估区域内欺骗干扰机无法对双基sar系统实施有效干扰的欺骗干扰机失效区域,可以为分析双基sar系统的抗欺骗干扰性能与改进双基sar系统构型提供依据。
- 还没有人留言评论。精彩留言会获得点赞!