一种依托于DEM和视场角的目标定位方法与流程
本发明属于目标定位领域,具体涉及一种依托于dem和视场角的目标定位方法。
背景技术:
1、对地目标定位是指在获取地面图像的同时通过目标定位方法得到其详细的地理位置信息。其中,目标定位方法是依据飞行物和相机所提供的各种参数建立相应的坐标系,利用坐标变换矩阵将目标点、相机、飞行物等相关元素统一在同一个坐标系内,通过目标点与相机像平面的位置关系求取目标点的实际位置。数字地形模型(dtm),是定义于二维区域上的一个有限项的向量序列,它以离散分布的平面来模拟连续分布的地形。而dem,即数字高程模型,是dtm的一个分支,是通过有限的已知地面高程数据点对地形表面进行数字化模拟的数字模型,即通过地表上的不同的分散的数据点建立连续函数来模拟地表的模型,利用构造的函数能够得到地面上任何一个未知点的高程,本质是插值逼近或曲面拟合。
2、现有技术中的基于坐标转换和视轴共线方程的目标定位方法,该方法通过经纬度及高程信息(海拔)、地球椭球模型(wgs-84模型)、地球坐标系(earth-center earth-fixed,ecef)和北东地坐标系(north-east-down,ned)等坐标系进行转换,并基于ccd摄像机成像原理即成像瞬间地面目标点经投影中心在相空间上投影点始终在一条直线上,即摄影测量中的共线构像原理,实现单幅图像目标定位。但存在如下问题,由于该方法需要提前给定图像区域的平均高程信息,将其视作每一目标点的海拔高度,因此受高程误差影响较大,在地面地形起伏较大的区域误差极大。且模型较为简单,误差干扰因素过多;
3、现有技术中的基于数字高程模型的对地目标定位方法,该方法采用数字高程模型(digital elevation model,dem)代替地球椭球模型,大幅提高了丘陵、山区等地形条件下的目标定位精度。dem是一组有序数值阵列,该方法采用迭代的方式对目标进行定位,其定位精度取决于dem空间分辨率、迭代计算次数。但存在如下问题,相对于飞行物或相机所携带的数据存储容量来说,dem数据显得过为庞大,一般采用精度较高的dem模型,(如30米的dem模型),因此在大部分情况下只能在机下实验室进行定位,目标定位的时效性较差。
技术实现思路
1、本发明的目的在于针对解决背景技术中提出的问题,提出一种依托于dem和视场角的目标定位方法。
2、为实现上述目的,本发明所采取的技术方案为:
3、本发明提出的一种依托于dem和视场角的目标定位方法,应用于飞行物上,飞行物上设有相机,依托于dem和视场角的目标定位方法,包括:
4、通过相机对目标物进行图像拍摄,且以图像的左上角o点为原点,并以像元尺寸为单位建立xy轴直角坐标系,得到图像上目标物投影的第一坐标;
5、将图像上目标物投影的第一坐标依次转换为相机坐标系下目标物投影的第二坐标、飞行物坐标系下目标物投影的第三坐标、ned坐标系下的目标物投影第四坐标和地球坐标系下目标物投影的第五坐标;
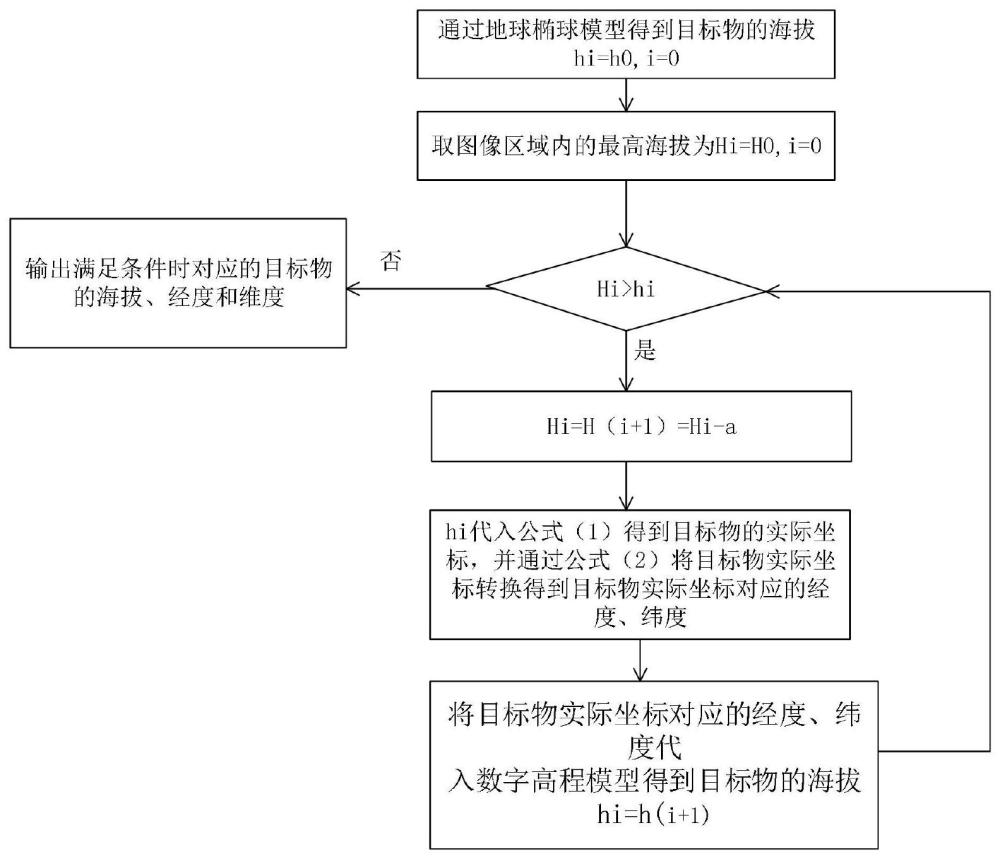
6、依次联立视轴共线方程和地球椭球模型,并初始化地球椭球模型中目标物的海拔,将第五坐标带入到联立的方程得到目标物实际坐标,并通过地理位置坐标转换公式将目标物实际坐标转换得到目标物实际坐标对应的经度和纬度;
7、将目标物实际坐标代入地球椭球模型得到目标物的海拔为hi,取目标区域内的最高海拔为hi,若hi>hi,则最高海拔hi=hi+1=hi-a,其中a表示预设的目标物海拔定位误差,将目标物实际坐标对应的经度、纬度带入数字高程模型得到目标物的海拔hi为hi+1,迭代多次后,当hi≤hi时,输出满足该条件时对应的目标物的海拔、经度和纬度,进而得到目标物最终的位置信息。
8、优选地,将图像上目标物投影的第一坐标转换为相机坐标系下目标物投影的第二坐标,包括:
9、图像上目标物投影的第一坐标表示为(x1,y1);
10、根据相机的水平视场角或垂直视场角计算得到相机的焦距f,在xy轴直角坐标系的基础上,以焦距所在的直线作为z轴,得到xyz三维直角坐标系,且原点为o点,并将该三维直角坐标系作为相机坐标系,则相机坐标系下目标物投影的第二坐标为(x2,y2,z2,m)=(x1,y1,f,m),其中m表示缩放量。
11、优选地,根据相机的水平视场角或垂直视场角计算得到相机的焦距f,具体计算公式如下:
12、根据水平视场角:
13、
14、得到:
15、
16、根据垂直视场角:
17、
18、得到:
19、
20、其中,afovh表示水平视场角,afovv表示垂直视场角,u表示像元尺寸,w表示图像的宽度,h表示图像的高度。
21、优选地,将相机坐标系下目标物投影的第二坐标转换到飞行物坐标系下目标物投影的第三坐标,包括:
22、相机在相机坐标系下绕x轴转动的角度为θroll,绕y轴转动的角度为θpitch,通过矩阵完成相机坐标系xyz到飞行物坐标系x′y′z′的转换,且矩阵具体计算如下:
23、
24、则飞行物坐标系下目标物投影的第三坐标为
25、优选地,将飞行物坐标系下目标物投影的第三坐标转换到ned坐标系下目标物投影的第四坐标,包括:
26、ned坐标系的原点为o点,飞行物在飞行物坐标系下的横滚角和俯仰角、航向角依次为θ和μ,则:
27、将d轴旋转至z′轴方向的矩阵为:
28、
29、将e轴旋转至y′轴方向的矩阵为:
30、
31、将n轴旋转至x′轴方向的矩阵为:
32、
33、通过矩阵完成飞行物坐标系x′y′z′到ned坐标系的转换;
34、则ned坐标系下目标物投影的第四坐标为
35、优选地,将ned坐标系下目标物投影的第四坐标转换到地球坐标系下目标物投影的第五坐标,包括:
36、通过矩阵将地球坐标系x″y″z″的原点平移至ned坐标系的d轴与地球坐标系的z″轴的交点处,且矩阵的具体形式如下:
37、
38、通过矩阵将地球坐标系的x”、y”轴绕z”轴旋转,使得x”、z”轴构成的平面与n、d轴构成的平面重合,且矩阵的具体形式如下:
39、
40、通过矩阵将地球坐标系的x”、z”轴绕y”轴旋转,使得z”轴指向地心方向,且矩阵的具体形式如下:
41、
42、通过矩阵将地球坐标系的原点转换到ned坐标系的原点,使得两个坐标系的原点重合,且矩阵的具体形式如下:
43、
44、其中,
45、
46、其中,α表示飞行物的纬度,λ表示飞行物的经度,h’表示飞行物的海拔,rn表示飞行物纬度为α时的卯酉圈曲率半径,re表示地球半长轴,e表示地球偏心率;
47、通过矩阵完成ned坐标系到地球坐标系x”y”z”的转换;
48、则地球坐标系下目标物投影的第五坐标为
49、优选地,依次联立视轴共线方程和地球椭球模型,并初始化地球椭球模型中目标物的海拔,将第五坐标带入到联立的方程得到目标物实际坐标,并通过地理位置坐标转换公式将目标物实际坐标转换得到目标物实际坐标对应的经度和纬度,包括:
50、联立的方程为:
51、
52、首先初始化为hi为0,则通过公式(1)得到目标物实际坐标(x,y,z);
53、其中,(xc,yc,zc)表示飞行物的坐标,rp表示地球半短轴,hi表示目标物的海拔,且i的取值为0,1,,,n;
54、然后通过地理位置坐标转换公式将目标物实际坐标转换得到目标物的经度、纬度,具体公式如下:
55、
56、其中,
57、
58、其中,表示目标物实际坐标对应的纬度,θ1表示目标物实际坐标对应的经度,rn'表示纬度为时的卯酉圈曲率半径。
59、优选地,将目标物实际坐标代入地球椭球模型得到目标物的海拔为hi,具体公式计算得到的公式如下:
60、
61、与现有技术相比,本发明的有益效果为:
62、1、本依托于dem和视场角的目标定位方法引入dem模型获取目标区域的海拔信息,结合地球椭球模型及视轴共线方程进行迭代计算,可以将目标定位的海拔差控制在较小的范围以内,从而降低了目标区域的地形起伏对目标位置信息精度的影响;
63、2、在焦距获取不到的情况下,本方法通过水平、垂直视场角来替换相机坐标系中焦距参数,进而实用性较高;
64、3、本方法使用了轻量级的dem模型(如90米的dem模型),时效性较高,解决了现有技术中使用精度较高的dem模型,数据覆盖区域广、空间分辨率高带来的不便因素就是模型大、调用时速度慢,进而导致目标定位时效性低的问题。
- 还没有人留言评论。精彩留言会获得点赞!