近地面水汽廓线探测系统及探测方法
本发明属于大气、气象及环境探测,具体涉及近地面水汽廓线探测系统,还涉及近地面水汽廓线探测方法。
背景技术:
1、水汽是大气的关键因子,对人类的生产、生活有重大影响。水汽是大气层中唯一存在气、液、固三种相变的物质,许多大气、环境的物理与化学过程都与之密切相关。水汽的变化深刻影响着全球气候、环境和水资源系统,对人类社会的发展和生产活动有着重大影响。水汽在大气中含量并不多,仅占所有气体成分的0.1%~3%,但是其浓度变化差异很大。绝大部分水汽集中在大气底层,有一半的水汽集中在两公里以下的大气边界层内的对流层。水汽浓度因地域、气流、温度等诸多因素影响浓度不断改变,在大气湍流作用下,水汽变化更是瞬息万变,高精度近地面水汽探测对提高天气预报的准确性、减少重大气象灾害等具有重要意义。水汽廓线作为大气中水汽含量随高度分布的曲线,其高精度和高时空分辨率的特点,对气象、气候、环境变化的研究具有重要价值,是最为基础的数据。
2、针对水汽廓线探测,目前已经发展出了直接测量和遥感探测两大类探测方法。直接测量方法通过无线电探空球、气象塔、机载传感器等手段测量水汽浓度,虽然探测精度很高,但分别存在数据稀疏、高度有限及成本较高的缺点。遥感测量方法利用电磁波、光波与水汽之间的相互作用进行间接探测。遥感探测利用水汽的微波辐射、对电磁波的特殊吸收来探测水汽浓度,其中,微波辐射探测、gps探测、红外高光谱大气探测等方法已在气象中得到广泛应用,并已形成了地基、机载及星载等多种探测方式。然而,这些方法仅能够得到所探测路径的水汽平均浓度——“柱浓度”。虽然也可以通过多路径反演方法得到水汽廓线,但分辨率非常有限。
3、激光雷达探测是一种主动探测方法,通过接收其所发生的窄脉冲激光光束在大气中传输时被水汽吸收的回波信号,反演获得水汽浓度随探测高度的变化的廓线信息,具有高的时空分辨率。目前,激光雷达已经衍生出了拉曼激光雷达和差分吸收激光雷达两种水汽探测体制。然而,由于窄脉冲后向散射激光雷达的发射光束与接收视场不完全重合,导致其存在一定的探测盲区,无法获得近地面约500米以内的廓线信息。通过重叠因子修正,可以减小探测盲区,但依然存在较大误差;通过扩大接收望远镜尺寸,也可在一定程度上减小探测盲区,但会带来成本增加、体积庞大等问题。
4、沙氏成像激光雷达是一种以高功率连续光激光器为光源、侧向放置的图像传感器为探测器的激光雷达系统,在满足沙氏成像条件下,以图像的像素位置分辨实现了距离分辨探测,可以获得探测路径上的廓线信息;侧向散射激光雷达与沙氏成像激光雷达基本相似,但探测用的图像传感器与发射光束之间有一定的距离、毋需满足沙氏成像约束。这两种激光雷达都具有结构紧凑、成本低、无探测盲区(或探测盲区较小)等特点,但由于图像传感器(cmos/ccd)灵敏度尚不理想,其探测距离及探测灵敏度均不及窄脉冲后向散射激光雷达。
技术实现思路
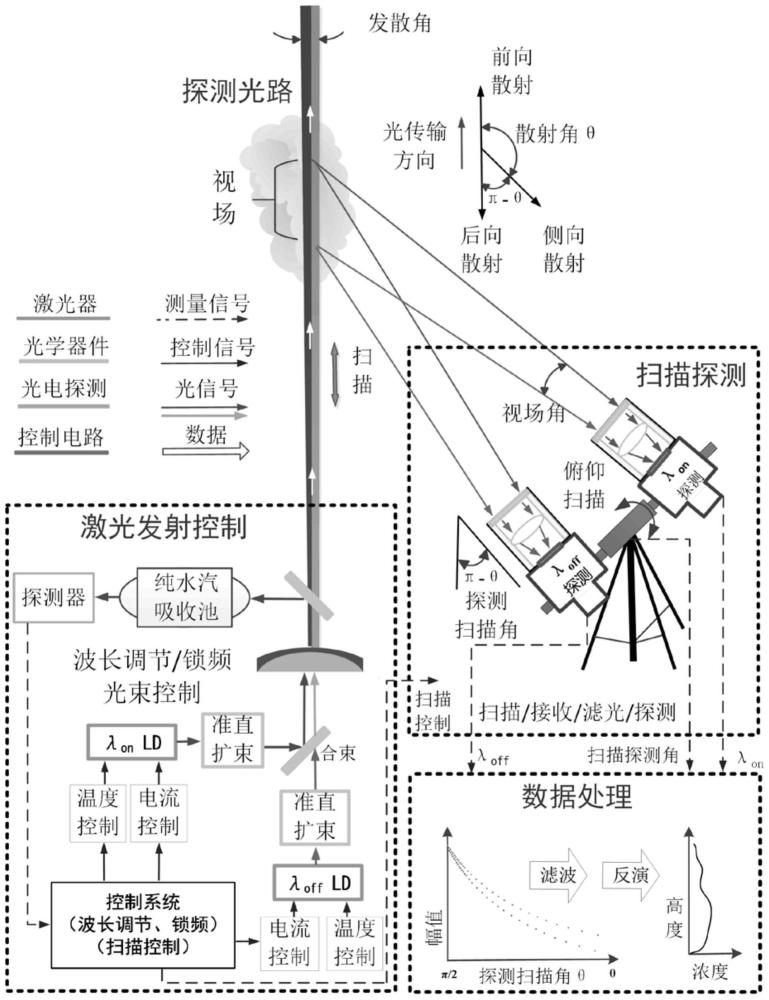
1、本发明的目的是提供近地面水汽廓线探测系统,以红外波段、波长相近的两个连续光半导体激光器作为探测光源,通过高增益、高灵敏度的探测器侧向扫描探测光路的侧向散射信号,以差分吸收方法反演获得近地面水汽的精细廓线,补充近地面水汽探测的盲区。
2、本发明的另一目的是提供近地面水汽廓线探测方法,能够实现近地面水汽廓线的无盲区精细探测。
3、本发明所采用的技术方案是:近地面水汽廓线探测系统,包括:
4、激光发射控制单元,用于向大气中发射连续双波长探测光信号形成探测光路,并控制、调节探测光信号的波长;
5、扫描探测单元,采用变步距角扫描的方式侧后向扫描探测光路,获得不同扫描角度时探测光路侧后向散射光信号;
6、数据处理单元,用于对扫描探测单元接收的散射光信号进行数据处理,并结合探测模型和差分探测理论,计算得到近地面水汽的浓度廓线。
7、本发明的特点还在于:
8、激光发射控制单元包括两个发射波长为930nm~950nm的半导体激光器,每个半导体激光器输出端分别连接一个准直透镜,两个半导体激光器发出的激光分别经过准直扩束镜a后出射光经过合束镜得到合束光线,合束光线依次经准直扩束镜b、二向色镜入射至大气中,在大气中形成探测光路,两个半导体激光器连接调节光信号波长的控制系统。
9、二向色镜透射率为99%,反射率为1%,二向色镜的反射方向还设置纯水吸收池、探测器,探测光路位于二向色镜的透射方向。
10、扫描探测单元包括支撑架,支撑架上通过角度调节装置连接桁架中部,桁架两端分别连接一个光电探测器,两个光电探测器对准探测光路的同一高度。
11、每个光电探测器为光电倍增管,光电倍增管内依次安装球形窄带滤光片、聚焦镜头。
12、本发明所采用的另一个技术方案是:近地面水汽廓线探测方法,使用近地面水汽廓线探测系统,具体按照以下步骤实施:
13、步骤1、通过激光发射控制单元向大气中发射连续双波长探测光信号形成探测光路,并控制、调节探测光信号的波长;
14、步骤2、通过扫描探测单元采用变步距角扫描的方式侧后向扫描探测光路,得到不同扫描角度时探测光路侧后向散射光信号;
15、步骤3、通过数据处理单元对扫描探测单元接收的散射光信号进行数据处理,并结合探测模型和差分探测理论,计算近地面水汽的浓度廓线。
16、激光发射控制单元包括两个发射波长为930nm~950nm的半导体激光器,每个半导体激光器输出端分别连接一个准直透镜,两个半导体激光器发出的激光分别经过准直扩束镜a后出射光经过合束镜得到合束光线,合束光线依次经准直扩束镜b、二向色镜入射至大气中,在大气中形成探测光路,两个半导体激光器连接调控光信号波长的控制系统;步骤1具体过程为:
17、采用两个半导体激光器发射探测光信号,经过准直扩束镜a聚焦、准直和扩束,再由合束镜将这两束光合束在一起增加出射激光光束的功率密度,经准直扩束镜b合束的光准直扩束,通过二向色镜透射后发射进入大气中,在大气中形成探测光路。
18、二向色镜透射率为99%,反射率为1%,二向色镜的反射方向还设置纯水吸收池、探测器、控制系统,探测光路位于二向色镜的透射方向;二向色镜的反射光进入纯水吸收池,经探测吸收后得到的光信号被探测器转换成电信号,将该电信号反馈给控制系统锁定输出光波在水汽的强、弱吸收波段,控制系统根据光波在水汽的强吸收波段调节一个半导体激光器的输入电流、温度,得到输出波长λon,根据光波在水汽的弱吸收波段调节另一个半导体激光器的输入电流、温度,得到输出波长λoff。
19、扫描探测单元包括支撑架,支撑架上通过角度调节装置连接桁架中部,桁架两端分别连接一个光电探测器,两个光电探测器对准探测光路的同一高度;步骤3具体过程为:
20、步骤3.1、其中一个光电探测器与探测光路之间的夹角为θ,探测扫描角为π-θ,两个光电探测器将接收的光信号转变为电信号,得到每个夹角θ对应的电信号幅值xon、xoff;对每个夹角θ对应的电信号幅值进行多次采集、累加得到平均电信号幅值平均值
21、步骤3.2、当θ=π时,对应的探测光路上位置为0点,当θ<π时探测光路上的位置为探测高度z,根据夹角θ与探测高度z的对应关系,将获得的电信号幅值平均值与探测高度z进行映射,得到侧向散射回波功率pλon(z)、pλoff(z)信号;改变夹角θ,重复步骤3.1、步骤3.2,直至完成探测光路的全扫描,得到每个夹角θ对应侧向散射回波功率pλon(z)、pλoff(z)数据链表;
22、步骤3.3、对每个倾斜角度对应pλon(z)、pλoff(z)数据链表中数据进行数值滤波处理;
23、步骤3.4、根据差分探测理论:引入水汽的吸收截面,设计浓度廓线反演算法,并设计浓度廓线与干扰气体、侧向探测相关系数的解耦方法,对反演算法进行修正,获得近地面水汽的浓度廓线。
24、对反演算法进行修正公式为:
25、
26、式中:λon为位于待测水汽的强吸收线尖峰处;λoff为位于待测水汽的零吸收或弱吸收处;z为高度映射;θ为扫描探测角;为水汽等效吸收截面;n(z)为水汽浓度。
27、本发明的有益效果是:
28、本发明近地面水汽廓线探测系统,以红外波段、波长相近的两个连续光半导体激光器作为探测光源,通过高增益、高灵敏度的探测器侧向扫描探测光路的侧向散射信号,以差分吸收方法反演获得近地面水汽的精细廓线,补充近地面水汽探测的盲区。
29、本发明近地面水汽廓线探测方法,侧后向扫描连续光差分吸收激光雷达水汽廓线探测,可实现近地面水汽廓线的精细探测且成本低。该方法填补了目前窄脉冲激光雷达因存在较大的探测盲区,不能实现近地面水汽廓线探测的空白。为获得对流层全水汽廓线提供技术支撑,将有力地促进气象、环保部门的相关工作。
- 还没有人留言评论。精彩留言会获得点赞!