一种标靶几何精度因子最小贡献值递推的选靶系统及方法
本发明属于激光扫描仪标定优化设计,尤其涉及一种标靶几何精度因子最小贡献值递推的选靶系统及方法。
背景技术:
1、地面三维扫描仪是一种主动式测量设备,可快速复制实景。测量原理为设备发出激光,收集发射信号与照射物体表面反射回波信号的时间、强度等信息,获得目标的距离、反射率等信息,再辅以垂直方向和水平方向的扫描角度信息,从而得到目标的空间信息。同传统测绘手段相比,该技术具有测量速度快、实效性强,能够全天候工作,数据传输、加工、表达容易,操作方便。随着三维激光扫描技术的不断更新,越来越多的高精度测量领域开始引入该技术。为获得高质量的激光点云,设备检校必不可少。
2、现有方法仅从标靶样式和材质、检校模型和参数优化方法等方面对扫描仪检校方法进行改进,而对标靶几何参数对扫描仪检校性能的影响机理还不够清晰;单存的变换标靶类型并不能有效提高标定精度和效率,也没有学者定性或定量的分析标靶选择对系统误差标定的影响。因此,有必要研究标靶距离、数量、分布等几何特点对系统误差检校精度的作用机理,制定科学的选靶方法以提高标定效率,实现地面三维扫描仪合理、高效地检校。
技术实现思路
1、针对缺乏定量分析制定科学选靶方案的问题,本文提出了一种标靶几何精度因子最小贡献值递推的选靶系统及方法,旨在通过定量分析每个标靶对整体组合标靶gdop以及模型参数标定精度的影响,设计科学的标靶组合或布设方案,使标靶测量更具有针对性,能够快速地选出最优标靶组合或偏差不大的次优标靶组合,提高标定效率。
2、本发明系统的技术方案为一种标靶几何精度因子最小贡献值递推的选靶系统,包括:
3、在室内环境的四周墙面、屋顶随机布设多个黑白相间的田字形方格标靶;
4、将处理终端、三维扫描仪、高精度全站仪放置于室内地面;
5、所述处理终端分别与所述的三维扫描仪、高精度全站仪依次连接;
6、构建误差自检校模型,将每个田字形方格标靶的黑色方格交点在三维扫描仪坐标系下的测量数据、在高精度全站仪坐标系下的三维坐标作为误差自检校模型的输入并进行线性化,得到每个田字形方格标靶的误差方程、误差系数矩阵,通过多个田字形方格标靶的误差方程构组成误差方程组,结合多个田字形方格标靶的误差系数矩阵计算多个田字形方格标靶的几何精度因子;
7、计算每个田字形方格标靶对m个田字形方格标靶的几何精度因子的贡献值;
8、选出贡献值最小的田字形方格标靶;
9、若贡献值最小的田字形方格标靶大于等于贡献值阈值则选靶结束,输出所选田字形方格标靶;若贡献值最小的田字形方格标靶小于贡献值阈值,则去除贡献值最小的田字形方格标靶作为待优选的田字形方格标靶组合,直至贡献值最小的田字形方格标靶大于等于贡献值阈值,并输出所选田字形方格标靶;
10、将扫描仪系统误差检校的标靶组合中每个田字形方格标靶中心在三维扫描仪下坐标系下的测量数据、高精度全站仪坐标系下的三维坐标代入误差自检校模型,根据最小二乘原理迭代解算误差自检校模型的参数,处理终端通过三维扫描仪采集室内环境三维点云,将采集的室内环境三维点云结合三维扫描仪的系统误差进行校正,得到校正后室内环境三维点云。
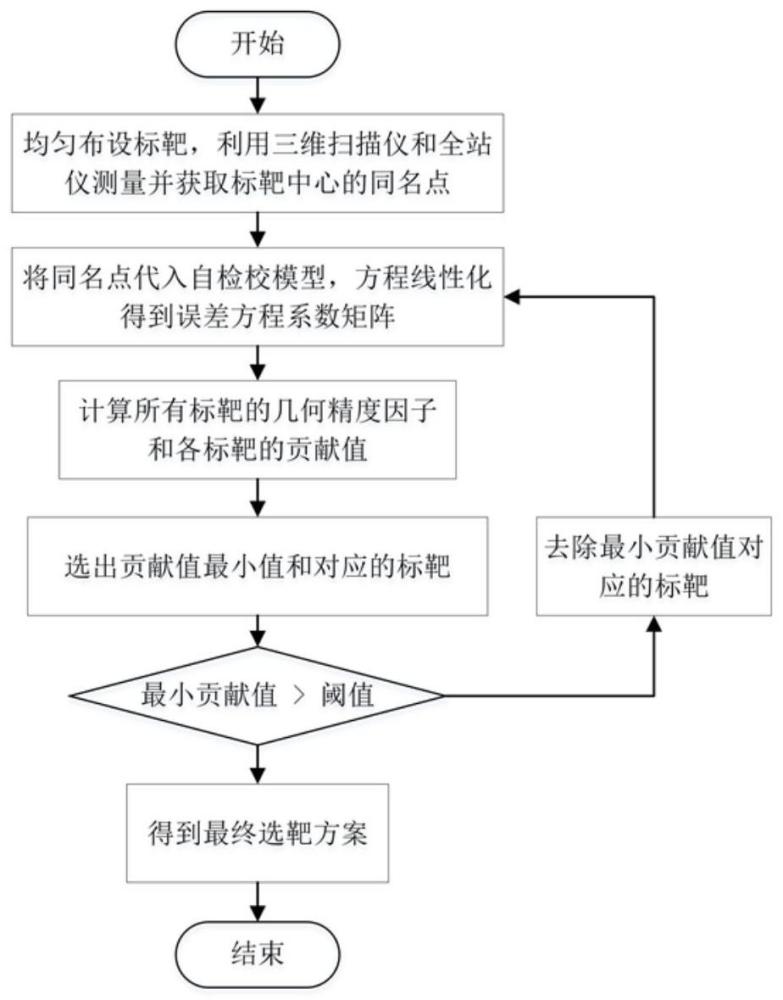
11、本发明方法的技术方案为一种标靶几何精度因子最小贡献值递推的选靶方法,具体包括以下步骤:
12、步骤1:处理终端利用三维扫描仪扫描室内环境点云,通过角点提取算法得到每个田字形方格标靶的黑色方格交点在三维扫描仪坐标系下的测量数据,调节高精度全站仪依次对准每个田字形方格标靶的黑色方格交点,处理终端利用高精度全站仪采集每个田字形方格标靶的黑色方格交点在高精度全站仪坐标系下的三维坐标;
13、步骤2:构建误差自检校模型,将每个田字形方格标靶的黑色方格交点在三维扫描仪坐标系下的测量数据、每个田字形方格标靶的黑色方格交点在高精度全站仪坐标系下的三维坐标作为误差自检校模型的输入,将代入输入的误差自检校模型进行线性化,得到每个田字形方格标靶的误差方程、误差系数矩阵,通过多个田字形方格标靶的误差方程构组成误差方程组,结合多个田字形方格标靶的误差系数矩阵计算多个田字形方格标靶的几何精度因子;
14、步骤3:计算每个田字形方格标靶对m个田字形方格标靶的几何精度因子的贡献值;
15、步骤4:在多个田字形方格标靶对m个田字形方格标靶的几何精度因子的贡献值中选出贡献值最小的田字形方格标靶;
16、步骤5:若贡献值最小的田字形方格标靶大于等于贡献值阈值则选靶结束,并跳转至步骤6;若贡献值最小的田字形方格标靶小于贡献值阈值,则在m个田字形方格标靶中去除贡献值最小的田字形方格标靶作为待优选的田字形方格标靶组合,令m=m-1,重复上述步骤1-4,直至贡献值最小的田字形方格标靶大于等于贡献值阈值,并跳转至步骤6;
17、步骤6:将输出的所选田字形方格标靶作为扫描仪系统误差检校的标靶组合,将扫描仪系统误差检校的标靶组合中每个田字形方格标靶中心在三维扫描仪下坐标系下的测量数据、高精度全站仪坐标系下的三维坐标代入步骤2所述的误差自检校模型,根据最小二乘原理迭代解算误差自检校模型的参数,得到优化求解后误差自检校模型,处理终端通过三维扫描仪采集室内环境三维点云,结合误差自检校模型的求解参数得到三维扫描仪的系统误差,将采集的室内环境三维点云结合三维扫描仪的系统误差进行校正,得到校正后室内环境三维点云;
18、作为优选,步骤1所述每个田字形方格标靶的黑色方格交点的测量数据,定义如下:
19、
20、i∈[1,m]
21、其中,m表示田字形方格标靶的数量,ri表示第i个田字形方格标靶的黑色方格交点在三维扫描仪坐标系下的测量数据中的测距值,表示第i个田字形方格标靶的黑色方格交点在三维扫描仪坐标系下的测量数据中的水平角,θi表示第i个田字形方格标靶的黑色方格交点在三维扫描仪坐标系下的测量数据中的高度角;
22、步骤1所述每个田字形方格标靶的黑色方格交点在高精度全站仪坐标系下的三维坐标,定义如下:
23、(xi,yi,zi)
24、i∈[1,m]
25、其中,m表示田字形方格标靶的数量,xi表示第i个田字形方格标靶的黑色方格交点在高精度全站仪坐标系下的x轴坐标,yi表示第i个田字形方格标靶的黑色方格交点在高精度全站仪坐标系下的y轴坐标,zi表示第i个田字形方格标靶的黑色方格交点在高精度全站仪坐标系下的z轴坐标;
26、作为优选,步骤2所述误差自检校模型,具体定义如下:
27、
28、
29、
30、
31、
32、
33、i∈[1,m]
34、其中,m表示田字形方格标靶的数量,ri表示第i个田字形方格标靶的黑色方格交点在三维扫描仪坐标系下的测量数据中的测距值,表示第i个田字形方格标靶的黑色方格交点在三维扫描仪坐标系下的测量数据中的水平角,θi表示第i个田字形方格标靶的黑色方格交点在三维扫描仪坐标系下的测量数据中的高度角,xi表示第i个田字形方格标靶的黑色方格交点在高精度全站仪坐标系下的x轴坐标,yi表示第i个田字形方格标靶的黑色方格交点在高精度全站仪坐标系下的y轴坐标,zi表示第i个田字形方格标靶的黑色方格交点在高精度全站仪坐标系下的z轴坐标,所述误差自检校模型共计13个参数,b为测距加常数,k为测距乘常数,φ,ω,k分别表示第一旋转参数、第二旋转参数、第三旋转参数,δx,δy,δz分别表示第一平移参数、第二平移参数、第三平移参数,k,b,α,w1,w2,βx,βy分别表示第一内参数、第二内参数、...、第七内参数,r(φ,ω,k)表示三维扫描仪坐标与全站仪坐标间的旋转矩阵,表示扫描仪纵轴旋转矩阵,与分别表示扫描仪横轴坐标系先后沿x轴和y轴转到纵轴坐标系的旋转矩阵,表示激光向量经反光镜反射矩阵;
35、步骤2所述计算田字形方格标靶的几何精度因子,具体如下:
36、
37、其中,trace表示矩阵求迹计算,am表示m个田字形方格标靶的误差方程系数矩阵,表示m个田字形方格标靶的误差方程系数矩阵的转置矩阵,gdopm表示m个田字形方格标靶的几何精度因子;
38、作为优选,步骤3所述计算每个田字形方格标靶对m个田字形方格标靶的几何精度因子的贡献值,具体公式如下:
39、
40、
41、其中,表示第i个每个田字形方格标靶对m个田字形方格标靶的几何精度因子的贡献值,gm表示m个田字形方格标靶的误差方程系数矩阵与对应转置矩阵相乘后的逆矩阵,am表示m个田字形方格标靶的误差方程系数矩阵,表示m个田字形方格标靶的误差方程系数矩阵的转置矩阵,di为第i个每个田字形方格标靶的误差系数矩阵,为第i个每个田字形方格标靶的误差系数矩阵的转置矩阵,i为单位阵;
42、本发明优点在于:
43、本发明分析了标靶gdop对模型参数标定精度的影响,定量分析获取组合标靶gdop最小值的条件;
44、定量评估标靶数量、距离、分布均匀性对gdop以及模型参数精度的影响;
45、定量分析每个标靶对于组合标靶gdop的贡献值,通过去除贡献值小的标靶,使标靶测量更具有针对性,提高标靶测量效率;
46、基于最小标靶gdop贡献值递推的选靶方法,选靶结果与最优标靶组合的gdop接近,选靶计算效率大幅提升;
47、可用于地面三维扫描仪系统误差检校,可通过定量分析每个标靶对标定选靶的几何贡献值选靶,提高标靶选择的合理性,提高检校的效率。
- 还没有人留言评论。精彩留言会获得点赞!