大气校正方法、装置、电子设备及存储介质与流程
本技术实施例涉及insar大气校正,尤其涉及一种基于insar技术的大气校正方法、装置、电子设备及存储介质。
背景技术:
1、合成孔径雷达干涉测量(interferometric synthetic aperture radar,insar)是一种高精度、高效率的地表形变测量方法,随着insar技术的飞速发展,海量高质量的干涉图使得大面积的地表形变监测成为可能。然而大气变化往往会影响sar卫星的电磁波信号,目前基于insar技术进行大气校正的方法可应用场景较为局限,并且在对于数据分块时无法自适应,从而会影响到大气校正结果的准确率。
技术实现思路
1、为了解决上述技术问题或者至少部分地解决上述技术问题,本技术实施例提供一种基于insar技术的大气校正方法、装置、电子设备及存储介质,用以解决现有insar技术中大气校正的方法较为局限,且无法自适应分块,影响大气校正结果的准确率的问题。
2、为了实现上述目的,本技术实施例提供的技术方案如下:
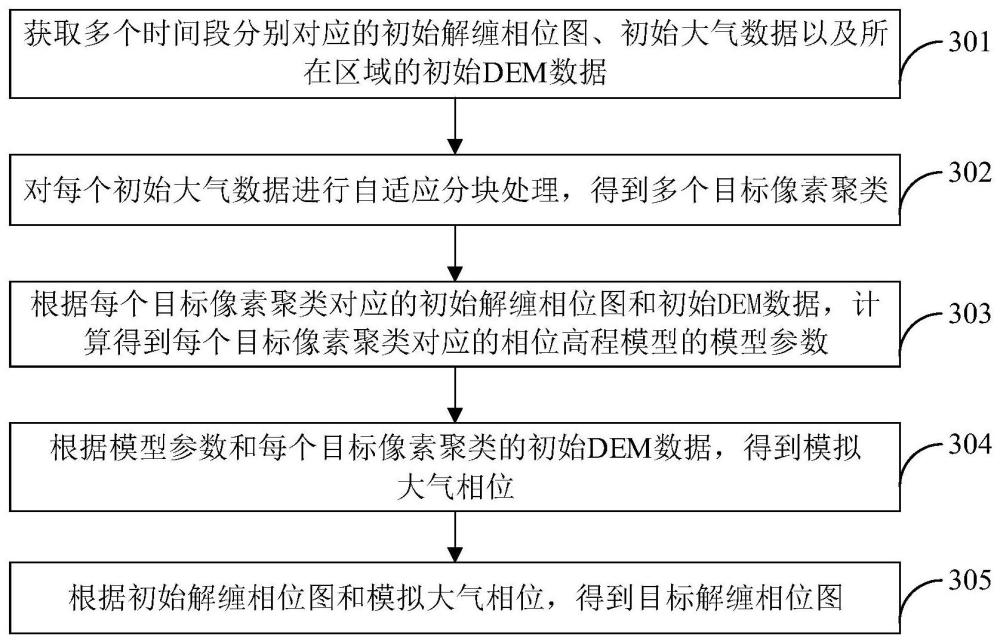
3、第一方面,本技术实施例提供一种基于insar技术的大气校正方法,所述大气校正方法包括:获取多个时间段分别对应的初始解缠相位图、初始大气数据以及所在区域的初始dem数据,每个时间段对应一个初始解缠相位图、一组初始大气数据和一个初始dem数据,所述初始解缠相位图、所述初始大气数据和所述初始dem数据的经纬度一致;
4、对每个初始大气数据进行自适应分块处理,得到多个目标像素聚类,每个目标像素聚类中包括多个像素点;
5、根据所述每个目标像素聚类对应的初始解缠相位图和初始dem数据,计算得到所述每个目标像素聚类对应的相位高程模型的模型参数;
6、根据所述模型参数和所述每个目标像素聚类的初始dem数据,得到模拟大气相位,所述模拟大气相位用于指示对流层延迟对相位的影响;
7、根据所述初始解缠相位图和所述模拟大气相位,得到目标解缠相位图,所述目标解缠相位图用于指示大气校正后的相位数据。
8、作为一种可选的实施方式,在本技术实施例的第一方面中,所述获取多个时间段分别对应的初始解缠相位图、初始大气数据以及所在区域的初始dem数据,包括:
9、获取每个时间段对应的第一解缠相位图、第一大气数据以及第一dem数据;
10、根据预设掩膜区域,对所述第一解缠相位图进行掩膜,得到所述初始解缠相位图,所述预设掩膜区域是根据震中位置或者手动确定的;
11、对所述第一大气数据和所述第一dem数据进行剪裁和重采样,得到所述初始大气数据和所述初始dem数据。
12、作为一种可选的实施方式,在本技术实施例的第一方面中,所述对每个初始大气数据进行自适应分块处理,得到多个目标像素聚类,包括:
13、按照预设划分规则,对每个初始大气数据进行预分块处理,得到多个初始像素聚类;
14、获取每个初始像素聚类的像素点数量和标准差,以及任意相邻两个初始像素聚类中心像素之间的距离;
15、根据所述像素点数量和第一阈值的第一比较结果、所述标准差和第二阈值的第二比较结果、所述距离和第三阈值的第三比较结果,对所述多个初始像素聚类进行迭代合并处理或拆分处理,得到所述多个目标像素聚类。
16、作为一种可选的实施方式,在本技术实施例的第一方面中,所述根据所述像素点数量和第一阈值的第一比较结果、所述标准差和第二阈值的第二比较结果、所述距离和第三阈值的第三比较结果,对所述多个初始像素聚类进行迭代合并处理或拆分处理,得到所述多个目标像素聚类,包括:
17、若所述第一比较结果指示所述像素点数量大于所述第一阈值,则将对应的初始像素聚类拆分为多个第一子像素聚类,以使得每个第一子像素聚类的像素点数量小于等于所述第一阈值,并将所述第一子像素聚类确定为所述目标像素聚类;
18、若所述第二比较结果指示所述标准差小于所述第二阈值,则将对应的初始像素聚类拆分为多个第二子像素聚类,以使得每个第二子像素聚类的标准差大于等于所述第二阈值,并将所述第二子像素聚类确定为所述目标像素聚类;
19、若所述第三比较结果指示所述距离小于所述第三阈值,则将对应的相邻两个初始像素聚类迭代合并为一个第三子像素聚类,并将所述第三子像素聚类确定为所述目标像素聚类。
20、作为一种可选的实施方式,在本技术实施例的第一方面中,所述根据所述每个目标像素聚类对应的初始解缠相位图和初始dem数据,计算得到所述每个目标像素聚类对应的相位高程模型的模型参数,包括:
21、计算所述每个目标像素聚类的变形像素比例,所述变形像素比例用于指示一个目标像素聚类中被掩膜的像素点所占的比例;
22、当第一目标像素聚类的变形像素比例小于等于比例阈值时,根据所述第一目标像素聚类对应的初始解缠相位图和dem数据,对所述第一目标像素聚类进行线性拟合,得到所述第一目标像素聚类对应的模型参数;
23、当第二目标像素聚类的变形像素比例大于所述比例阈值时,根据所述第二目标像素聚类的对应的初始解缠相位图和dem数据,对所述第二目标像素聚类进行插值计算,得到所述第二目标像素聚类对应的模型参数;
24、其中,所述第一目标像素聚类和所述第二目标像素聚类均为所述多个目标像素聚类中的任一个。
25、作为一种可选的实施方式,在本技术实施例的第一方面中,所述当第一目标像素聚类的变形像素比例小于等于比例阈值时,根据所述第一目标像素聚类对应的初始解缠相位图和dem数据,对所述第一目标像素聚类进行线性拟合,得到所述第一目标像素聚类对应的模型参数,包括:
26、根据所述第一目标像素聚类对应的初始解缠相位图和dem数据,确定所述第一目标像素聚类对应的相位数据集合和高程数据集合,所述每个像素点对应一个相位数据和一个高程数据;
27、当所述第一目标像素聚类的变形像素比例小于等于所述比例阈值时,对所述相位数据集合和所述高程数据集合进行线性拟合,得到所述第一目标像素聚类对应的模型参数。
28、作为一种可选的实施方式,在本技术实施例的第一方面中,所述根据所述初始解缠相位图和所述模拟大气相位,得到目标解缠相位图,包括:
29、将所述初始解缠相位图减去所述模拟大气相位,得到所述目标解缠相位图。
30、第二方面,本技术实施例提供一种基于insar技术的大气校正装置,所述大气校正装置包括:获取模块,用于获取多个时间段分别对应的初始解缠相位图、初始大气数据以及所在区域的初始dem数据,每个时间段对应一个初始解缠相位图、一组初始大气数据和一个初始dem数据,所述初始解缠相位图、所述初始大气数据和所述初始dem数据的经纬度一致;
31、处理模块,用于对每个初始大气数据进行自适应分块处理,得到多个目标像素聚类,每个目标像素聚类中包括多个像素点;
32、所述处理模块,还用于根据所述每个目标像素聚类对应的初始解缠相位图和初始dem数据,计算得到所述每个目标像素聚类对应的相位高程模型的模型参数;
33、所述处理模块,还用于根据所述模型参数和所述每个目标像素聚类的初始dem数据,得到模拟大气相位,所述模拟大气相位用于指示对流层延迟对相位的影响;
34、所述处理模块,还用于根据所述初始解缠相位图和所述模拟大气相位,得到目标解缠相位图,所述目标解缠相位图用于指示大气校正后的相位数据。
35、作为一种可选的实施方式,在本技术实施例的第二方面中,所述获取模块,具体用于获取每个时间段对应的第一解缠相位图、第一大气数据以及第一dem数据;
36、所述处理模块,具体用于根据预设掩膜区域,对所述第一解缠相位图进行掩膜,得到所述初始解缠相位图,所述预设掩膜区域是根据震中位置或者手动确定的;
37、所述处理模块,具体用于对所述第一大气数据和所述第一dem数据进行剪裁和重采样,得到所述初始大气数据和所述初始dem数据。
38、作为一种可选的实施方式,在本技术实施例的第二方面中,所述处理模块,具体用于按照预设划分规则,对每个初始大气数据进行预分块处理,得到多个初始像素聚类;
39、所述获取模块,具体用于获取每个初始像素聚类的像素点数量和标准差,以及任意相邻两个初始像素聚类中心像素之间的距离;
40、所述处理模块,具体用于根据所述像素点数量和第一阈值的第一比较结果、所述标准差和第二阈值的第二比较结果、所述距离和第三阈值的第三比较结果,对所述多个初始像素聚类进行迭代合并处理或拆分处理,得到所述多个目标像素聚类。
41、作为一种可选的实施方式,在本技术实施例的第二方面中,所述处理模块,具体用于若所述第一比较结果指示所述像素点数量大于所述第一阈值,则将对应的初始像素聚类拆分为多个第一子像素聚类,以使得每个第一子像素聚类的像素点数量小于等于所述第一阈值,并将所述第一子像素聚类确定为所述目标像素聚类;
42、所述处理模块,具体用于若所述第二比较结果指示所述标准差小于所述第二阈值,则将对应的初始像素聚类拆分为多个第二子像素聚类,以使得每个第二子像素聚类的标准差大于等于所述第二阈值,并将所述第二子像素聚类确定为所述目标像素聚类;
43、所述处理模块,具体用于若所述第三比较结果指示所述距离小于所述第三阈值,则将对应的相邻两个初始像素聚类迭代合并为一个第三子像素聚类,并将所述第三子像素聚类确定为所述目标像素聚类。
44、作为一种可选的实施方式,在本技术实施例的第二方面中,所述处理模块,具体用于计算所述每个目标像素聚类的变形像素比例,所述变形像素比例用于指示一个目标像素聚类中被掩膜的像素点所占的比例;
45、所述处理模块,具体用于当第一目标像素聚类的变形像素比例小于等于比例阈值时,根据所述第一目标像素聚类对应的初始解缠相位图和dem数据,对所述第一目标像素聚类进行线性拟合,得到所述第一目标像素聚类对应的模型参数;
46、所述处理模块,具体用于当第二目标像素聚类的变形像素比例大于所述比例阈值时,根据所述第二目标像素聚类的对应的初始解缠相位图和dem数据,对所述第二目标像素聚类进行插值计算,得到所述第二目标像素聚类对应的模型参数;
47、其中,所述第一目标像素聚类和所述第二目标像素聚类均为所述多个目标像素聚类中的任一个。
48、作为一种可选的实施方式,在本技术实施例的第二方面中,所述处理模块,具体用于根据所述第一目标像素聚类对应的初始解缠相位图和dem数据,确定所述第一目标像素聚类对应的相位数据集合和高程数据集合,所述每个像素点对应一个相位数据和一个高程数据;
49、所述处理模块,具体用于当所述第一目标像素聚类的变形像素比例小于等于所述比例阈值时,对所述相位数据集合和所述高程数据集合进行线性拟合,得到所述第一目标像素聚类对应的模型参数。
50、作为一种可选的实施方式,在本技术实施例的第二方面中,所述处理模块,具体用于将所述初始解缠相位图减去所述模拟大气相位,得到所述目标解缠相位图。
51、第三方面,本技术实施例提供一种电子设备,所述电子设备包括:
52、存储有可执行程序代码的存储器;
53、与所述存储器耦合的处理器;
54、所述处理器调用所述存储器中存储的所述可执行程序代码,执行本技术实施例第一方面中的大气校正方法。
55、第四方面,本技术实施例提供一种计算机可读存储介质,其存储计算机程序,所述计算机程序使得计算机执行本技术实施例第一方面中的大气校正方法。所述计算机可读存储介质包括rom/ram、磁盘或光盘等。
56、第五方面,本技术实施例提供一种计算机程序产品,当所述计算机程序产品在计算机上运行时,使得所述计算机执行第一方面的任意一种方法的部分或全部步骤。
57、第六方面,本技术实施例提供一种应用发布平台,所述应用发布平台用于发布计算机程序产品,其中,当所述计算机程序产品在计算机上运行时,使得所述计算机执行第一方面的任意一种方法的部分或全部步骤。
58、与现有技术相比,本技术实施例具有以下有益效果:
59、本技术实施例提供一种基于insar技术的大气校正方法、装置、电子设备及存储介质,获取多个时间段分别对应的初始解缠相位图、初始大气数据以及所在区域的初始dem数据,每个时间段对应一个初始解缠相位图、一组初始大气数据和一个初始dem数据,初始解缠相位图、初始大气数据和初始dem数据的经纬度一致;对每个初始大气数据进行自适应分块处理,得到多个目标像素聚类,每个目标像素聚类中包括多个像素点;根据每个目标像素聚类对应的初始解缠相位图和初始dem数据,计算得到每个目标像素聚类对应的相位高程模型的模型参数;根据模型参数和每个目标像素聚类的初始dem数据,得到模拟大气相位,模拟大气相位用于指示对流层延迟对相位的影响;根据初始解缠相位图和模拟大气相位,得到目标解缠相位图,目标解缠相位图用于指示大气校正后的相位数据。通过该方案,实现了对整个解缠相位图的时序insar、同震及震后的对流层的大气校正,该方法的优势在于无需进行多次实验以确定最佳分块数量,以及无需对解缠相位图进行裁剪,不仅能够有效削减对流层大气相位的影响,提高了insar形变观测精度,并提高了基于分块的时序insar大气校正的速度。
- 还没有人留言评论。精彩留言会获得点赞!