一种UWB双基站二维定位误差的修正方法与流程
本发明属于室内定位,涉及一种室内定位算法,具体涉及一种uwb双基站二维定位误差的修正方法。
背景技术:
1、随着城市化进程的加快和移动设备的普及,城市环境下高精度定位需求得到显著增长。被广泛应用的全球卫星导航系统gnss能够在全球范围内为用户提供全天候、全时段、高精度的位置信息服务,但由于卫星信号极易受到干扰和遮挡的特点,无法应用于商场、隧道、地下车库等室内场景。为解决现代生产生活位置服务“最后一公里”的问题,高精度室内定位技术成为当前导航定位领域的研究重点。
2、uwb(ultra wide band,超宽带)技术凭借系统复杂度低、发射信号功率谱密度低,对信道衰落不敏感,截获能力低,定位精度高等优点在众多室内定位技术中脱颖而出。但传统uwb高精度定位系统对基站个数和拓扑结构都有较高的要求,为此,提升双基站定位精度,降低uwb定位系统布设难度,是推广uwb技术亟待解决的问题。
3、中国专利文献cn115711619a公开了一种双基站uwb/ins组合的密林环境人员定位方法,该方法包括:建立密林环境空天地协同定位基准和系统,进入密林人员通过uwb标签分别与无人机平台uwb基站和车辆平台uwb基站twr双向测距,建立解析方程,得到不同时刻密林人员位置;进入密林人员通过惯性导航imu进行航迹推算,获取密林人员在不同时刻的位置变化;将通过twr双向测距得到的位置变化作为观测值,将通过惯性导航imu进行航迹推算得到的位置变化作为状态值,建立误差方程,利用图优化进行全局约束,获得密林人员准确位置。但该方法本质是uwb/imu融合定位方法,功耗高,即人员需同时搭载惯性导航imu和uwb标签,才能得到高精度定位信息。
4、中国专利文献cn116546620a公开了一种基于uwb的双基站定位标签的方法及系统,包括主基站、从基站以及标签,包括以下步骤:主基站开机后广播自身信息,实现信号发射与接收;主基站与从基站之间通过tof方案进行第一时间差收集,计算主基站与从基站之间的距离及角度;标签与主基站之间通过tof方案进行第二时间差收集后,采用uwb方案计算标签与主基站之间距离及角度;标签与从基站之间通过tof方案进行第三时间差收集后,采用uwb方案计算标签与主基站之间的距离及角度;分别定位主基站与从基站的中心点为原点,根据所述标签与主基站之间的距离以及所述标签与从基站之间的距离,计算得出所述标签可能的两位置;通过预设的第一角度阈值和第二角度阈值分别对所述位置点进行判断,舍弃错误点,保留正确点;则保留的所述正确点为所述标签在当前时间的位置,完成所述主基站和所述从基站双基站的定位。该技术方案主要是利用标签、主基站和从基站三者通信实现的,通过两两间的测距和测角实现对标签位置的估计。
5、中国专利文献cn115087096a公开了一种基于uwb的双基站二维定位方法。该方法为:步骤1、在定位区域的一侧布设两个超宽带基站,测量并标注两个超宽带基站的坐标值以及定位标签到两个超宽带基站之间的测量距离值;步骤2、根据坐标值和定位标签得到两个超宽带基站之间的测量距离值,计算定位标签到两个超宽带基站连线的投影点;步骤3、通过两个超宽带基站的坐标值计算得到两个超宽带基站之间的距离,同时结合定位标签到两个超宽带基站的测量距离值,从而得到定位标签所在点到两个超宽带基站连线上的垂直距离;步骤4、结合定位标签到两个超宽带基站连线上的投影和定位标签所在点到两个超宽带基站连线所在边的垂直距离得到定位标签的二维坐标。该方法创新点为在不增加基站个数的基础上,将一维定位升级为了二维定位,但该算法在标签距离基站连线较近时,定位误差较大。
6、因此,有必要提出一种uwb双基站二维定位误差的修正方法,能提升tof双基站定位精度,改善定位标签距离基站连线越近,定位精度越差的现象。
技术实现思路
1、本发明提供了一种uwb双基站二维定位误差的修正方法,旨在提升tof双基站定位精度,改善定位标签距离基站连线越近,定位精度越差的现象。
2、为了实现上述目的,本发明采用的方案是,该uwb双基站二维定位误差的修正方法,包括以下步骤:
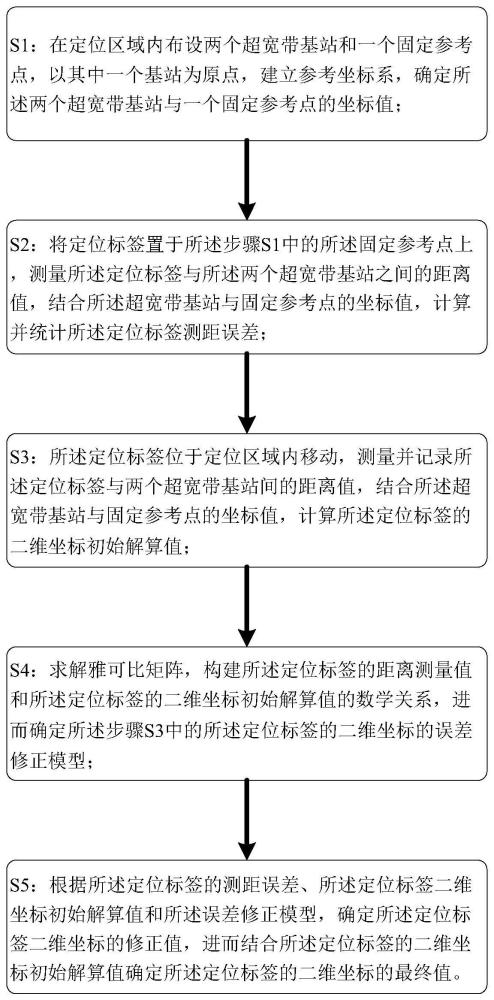
3、s1:在定位区域内布设至少两个超宽带基站和一个固定参考点,以其中一个所述超宽带基站为原点,建立参考坐标系,确定所述超宽带基站与所述固定参考点的坐标值;
4、s2:将定位标签置于所述步骤s1中的所述固定参考点上,测量所述定位标签与两个所述超宽带基站之间的距离值,结合两个所述超宽带基站与所述固定参考点的坐标值,计算并统计所述定位标签的测距误差;
5、s3:当所述定位标签在定位区域内移动,测量并记录所述定位标签与两个所述超宽带基站间的距离值,结合所述超宽带基站与所述固定参考点的坐标值,计算所述定位标签的二维坐标初始解算值;
6、s4:求解雅可比矩阵,构建所述定位标签的距离测量值和所述定位标签的二维坐标初始解算值的数学关系,进而确定所述步骤s3中的所述定位标签的二维坐标的误差修正模型;
7、s5:根据所述定位标签的测距误差、所述定位标签的二维坐标初始解算值和所述误差修正模型,确定所述定位标签二维坐标的修正值,进而结合所述定位标签的二维坐标初始解算值确定所述定位标签的二维坐标的最终值。
8、采用上述技术方案,在定位区域的一侧布设两个超宽带基站和一个固定参考点,通过将定位标签置于参考定位点,确定定位标签的测距误差;通过定位标签与两个超宽带基站形成一个三角形,且将定位标签作为三角形的顶点,获得定位标签作为顶点到达两个超宽带基站连线所在边的高以及定位标签在两个超宽带基站连线所在边上的投影点的坐标,进而得到定位标签二维坐标初始解算值;依据误差传播定理通过求解雅可比矩阵确定定位标签误差修正模型;借助前期测试统计的测距误差均值确定定位标签位置修正量,最终得到定位标签二维坐标的最终值。这样的设置在tof一维定位的基础上进行扩展,即仅用两个超宽带基站便可进行二维定位,有效降低了系统布设成本,而且通过误差修正模型提高了双基站二维定位的精度,实现了双基站在定位区域内高精度的二维定位。
9、作为本发明的优选技术方案,所述步骤s1中设定超宽带基站p1和超宽带基站p2沿x轴布设,所述固定参考点p0布设于所述定位区域内,其中所述超宽带基站p1的坐标为(0,0,z1),所述超宽带基站p2的坐标为(x2,0,z2),所述固定参考点的坐标为(x0,y0,z0),置于所述固定参考点的所述定位标签到所述超宽带基站i的距离测量值
10、作为本发明的优选技术方案,所述步骤s2中的所述定位标签的测距误差的计算公式为:
11、
12、其中,为定位标签置于固定参考点时的测距值,(xi,yi,zi)为超宽带基站i(i=1,2)的坐标,(x0,y0,z0)为固定参考点的坐标。
13、作为本发明的优选技术方案,所述步骤s3的具体步骤为:
14、s31:计算所述定位标签与所述超宽带基站p1和所述超宽带基站p2构成的三角形面积s,计算公式为:
15、
16、其中,为所述超宽带基站p1和所述超宽带基站p2之间的距离,di为所述定位标签到所述超宽带基站pi的测距值,p=(d0+d1+d2)/2为三角形的半周长;
17、s32:计算所述定位标签到所述超宽带基站p1和所述超宽带基站p2的连线的垂直距离h,计算公式为:
18、h=2s/d0 (3);
19、其中,s为由定位标签、超宽带基站围成的三角形面积,d0为所述超宽带基站p1和所述超宽带基站p2之间的距离;
20、s33:计算所述定位标签在所述超宽带基站p1和所述超宽带基站p2的连线上投影点p'到超宽带基站p1的距离值d',计算公式为:
21、
22、其中,d0为所述超宽带基站p1和所述超宽带基站p2之间的距离,di,i=1,2为所述定位标签到所述超宽带基站p1和所述超宽带基站p2之间的距离;
23、s34:计算所述定位标签的二维坐标初始解算值p0,公式为:
24、
25、其中,h为定位标签到所述超宽带基站p1和所述超宽带基站p2的连线垂直距离,d'为定位标签在所述超宽带基站p1和所述超宽带基站p2上的投影点距基站p1的距离。
26、作为本发明的优选技术方案,所述步骤s4的具体步骤为:
27、s41:确定所述定位标签关于所述定位标签和所述超宽带基站之间的测距值的雅可比矩阵j,记为:
28、
29、其中,k=px0/d0为所述定位标签在超宽带基站的连线上投影距基站p1的所述超宽带基站p1和所述超宽带基站p2之间距离的比值,(px0,py0)为定位标签二维坐标初始解算值,di,i=1,2为定位标签到所述超宽带基站p1和所述超宽带基站p2之间的距离,d0为所述超宽带基站p1和所述超宽带基站p2之间的距离;
30、s42:确定所述定位标签测距值d1,d2与二维坐标p0的数学关系,公式为:
31、
32、其中,j为定位标签的二维坐标关于测距值的雅可比矩阵;
33、s43:依据误差传递定律确定所述定位标签二维坐标误差修正模型,公式为:
34、
35、其中,σ为定位标签误差修正值,σ0为所述步骤s2中所述定位标签的测距误差均值,k=px0/d0为所述定位标签在超宽带基站连线上投影距离所述超宽带基站p1和所述超宽带基站p2之间距离的比值,(px0,py0)为所述定位标签的二维坐标初始解算值,di,i=1,2为所述定位标签到所述超宽带基站p1和所述超宽带基站p2之间的距离,d0为所述超宽带基站p1和所述超宽带基站p2之间的距离。
36、作为本发明优选技术方案,所述步骤s5具体步骤为:
37、s51:结合所述步骤s2中的所述定位标签的测距误差e、所述步骤s3中所述定位标签的二维坐标p以及所述步骤s4中所述定位标签的误差修正模型,确定所述定位标签的二维坐标误差修正值σp;
38、s52:将所述步骤s51中的所述定位标签的二维坐标误差修正值σp和所述步骤s3中的所述定位标签二维坐标初始解算值p0结合,确定所述定位标签的二维坐标最终值p,公式为:
39、
40、其中,σx,σy为所述定位标签的误差修正值,(px0,py0)为所述定位标签二维坐标初始解算值,(px,py)为所述定位标签的二维坐标的最终值。
41、与现有技术相比,本发明的技术方案有益效果是:该uwb双基站二维定位误差的修正方法不仅保留了tof双基站二维定位拓扑简单,所需设备较少,在不增加设备成本的基础上,有效提升系统性能的优点,而且通过统计tof测量误差、求解二维坐标关于测量误差的雅可比矩阵和推导由测量误差到二维坐标的误差传递模型,有效提升现有tof双基站二维定位的精度,即只需两个超宽带基站,就可实现二维高精度定位的效果;该uwb双基站超宽带二维定位误差修正方法可以广泛应用于预算成本有限的定位服务领域。
- 还没有人留言评论。精彩留言会获得点赞!