一种涉水深度的计算方法、装置、设备及可读存储介质与流程
本申请涉及涉水感应系统,特别是涉及一种涉水深度的计算方法、装置、设备及可读存储介质。
背景技术:
1、当车辆涉水时,由于驾驶员对于车辆的涉水能力和涉水深度都是未知的,特别是在大雾、暴雨等恶劣天气,盲目行驶可能导致车辆进水发生故障。
2、涉水感应系统是利用传感器探测涉水信息,计算涉水深度后,通过hmi(humanmachine interface,人机界面)实时向驾驶员显示当前的涉水深度以及车辆的涉水能力的。现有的涉水深度的计算方法,一般是利基于超声波雷达进行涉水深度的计算,但由于各种因素的干扰容易导致超声波雷达的离地高度发生变化,从而出现涉水深度的计算精度无法保证的问题。
3、因此,如何提高涉水深度的计算精度,是本领域技术人员急需解决的问题。
技术实现思路
1、基于上述问题,本申请提供了一种涉水深度的计算方法、装置、设备及可读存储介质,通过自学习的方式确定车辆上装备的超声波雷达传感器的离地高度,然后以该离地高度为基础确定当前车辆的涉水深度,从而解决了现有技术涉水深度的计算精度较差的问题。
2、第一方面,本申请提供了一种涉水深度的计算方法,包括:
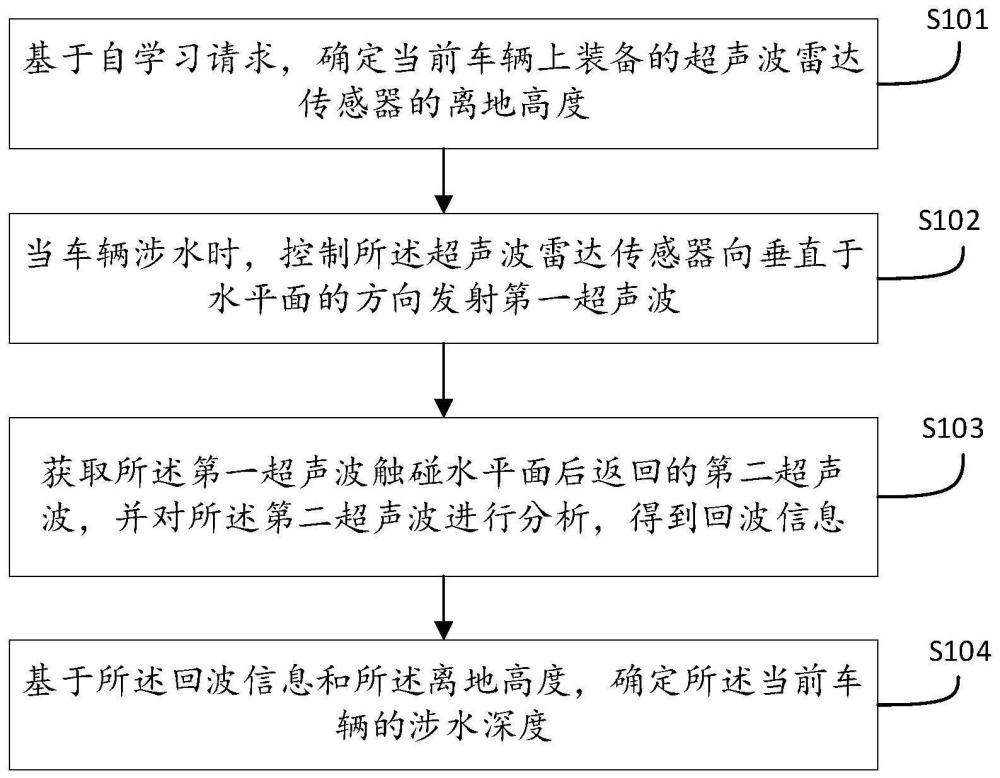
3、基于自学习请求,确定当前车辆上装备的超声波雷达传感器的离地高度;
4、当所述当前车辆涉水时,控制所述超声波雷达传感器向垂直于水平面的方向发射第一超声波;
5、获取所述第一超声波触碰水平面后返回的第二超声波,并对所述第二超声波进行分析,得到回波信息;
6、基于所述回波信息和所述离地高度,确定所述当前车辆的涉水深度。
7、可选的,所述基于自学习请求,确定当前车辆上装备的超声波雷达传感器的离地高度,包括:
8、当获取到自学习请求时,若当前车辆满足自学习条件中的所有项,则控制所述当前车辆进入自学习策略,确定所述当前车辆上装备的超声波雷达传感器的当前高度值,并将所述当前高度值作为所述超声波雷达传感器的离地高度进行确认。
9、可选的,所述基于自学习请求,确定当前车辆上装备的超声波雷达传感器的离地高度,包括:
10、当获取到自学习请求时,若当前车辆不满足自学习条件中的任一项,则拒绝所述当前车辆进入自学习策略,并将所述当前车辆装备超声波雷达传感器时设置的所述超声波雷达传感器的默认高度值作为所述超声波雷达传感器的离地高度并进行确认。
11、可选的,所述基于自学习请求,确定当前车辆上装备的超声波雷达传感器的离地高度,包括:
12、当未获取到自学习请求时,将当前车辆装备超声波雷达传感器时设置的所述超声波雷达传感器的默认高度值作为所述超声波雷达传感器的离地高度并进行确认。
13、可选的,所述基于自学习请求,确定当前车辆上装备的超声波雷达传感器的离地高度之前,还包括:
14、实时获取诊断仪发送的或驾驶员主动请求的自学习请求。
15、可选的,所述自学习条件包括:
16、涉水系统无故障、车辆静止、两侧后视镜展开、主副驾车门关闭以及车辆在平地工况。
17、可选的,所述确定所述当前车辆上装备的超声波雷达传感器的当前高度值,包括:
18、获取连续的预定时间内的所述当前车辆上装备的超声波雷达传感器的测量高度值;
19、对所述测量高度值进行中位值平均处理,得到所述超声波雷达传感器的当前高度值。
20、第二方面,本申请提供了一种涉水深度的计算装置,其特征在于,包括:
21、第一确定模块,用于基于自学习请求,确定当前车辆上装备的超声波雷达传感器的离地高度;
22、发射模块,用于当所述当前车辆涉水时,控制所述超声波雷达传感器向垂直于水平面的方向发射第一超声波;
23、分析模块,用于获取所述第一超声波触碰水平面后返回的第二超声波,并对所述第二超声波进行分析,得到回波信息;
24、第二确定模块,用于基于所述回波信息和所述离地高度,确定所述当前车辆的涉水深度。
25、第三方面,本申请提供了一种涉水深度的计算设备,其特征在于,包括:
26、存储器,用于存储计算机程序;
27、处理器,用于执行所述计算机程序时实现如上述任一项所述涉水深度的计算方法的步骤。
28、第四方面,本申请提供了一种可读存储介质,所述可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一项所述涉水深度的计算方法的步骤。
29、从以上技术方案可以看出,相较于现有技术,本申请具有以下优点:
30、本申请首先基于自学习请求,确定当前车辆上装备的超声波雷达传感器的离地高度。当当前车辆涉水时,控制超声波雷达传感器向垂直于水平面的方向发射第一超声波。然后获取第一超声波触碰水平面后返回的第二超声波,并对第二超声波进行分析,得到回波信息。最后基于回波信息和离地高度,确定当前车辆的涉水深度。如此,通过自学习的方式确定车辆上装备的超声波雷达传感器的离地高度,然后以该离地高度为基础确定当前车辆的涉水深度,从而提高了涉水深度的计算精度。
技术特征:
1.一种涉水深度的计算方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述基于自学习请求,确定当前车辆上装备的超声波雷达传感器的离地高度,包括:
3.根据权利要求1所述的方法,其特征在于,所述基于自学习请求,确定当前车辆上装备的超声波雷达传感器的离地高度,包括:
4.根据权利要求1所述的方法,其特征在于,所述基于自学习请求,确定当前车辆上装备的超声波雷达传感器的离地高度,包括:
5.根据权利要求1所述的方法,其特征在于,所述基于自学习请求,确定当前车辆上装备的超声波雷达传感器的离地高度之前,还包括:
6.根据权利要求2或3任一项所述的方法,其特征在于,所述自学习条件包括:
7.根据权利要求2所述的方法,其特征在于,所述确定所述当前车辆上装备的超声波雷达传感器的当前高度值,包括:
8.一种涉水深度的计算装置,其特征在于,包括:
9.一种涉水深度的计算设备,其特征在于,包括:
10.一种可读存储介质,其特征在于,所述可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述涉水深度的计算方法的步骤。
技术总结
本申请公开了一种涉水深度的计算方法、装置、设备及可读存储介质,可应用于涉水感应系统技术领域,该方法包括:基于自学习请求,确定当前车辆上装备的超声波雷达传感器的离地高度;当所述当前车辆涉水时,控制所述超声波雷达传感器向垂直于水平面的方向发射第一超声波;获取所述第一超声波触碰水平面后返回的第二超声波,并对所述第二超声波进行分析,得到回波信息;基于所述回波信息和所述离地高度,确定所述当前车辆的涉水深度。如此,通过自学习的方式确定车辆上装备的超声波雷达传感器的离地高度,然后以该离地高度为基础确定当前车辆的涉水深度,从而提高了涉水深度的计算精度。
技术研发人员:黄金云,苏建宽,代磊,马寒明,毛伟祥
受保护的技术使用者:上海汽车集团股份有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!