基于单接收机的多基地多目标定位方法
本发明涉及一种目标定位技术,尤其是涉及一种基于单接收机的多基地多目标定位方法。
背景技术:
1、多基地定位系统以其灵活性和良好的性能引起了人们的极大关注。在多基地定位系统中,由发射机发射信号,直接被接收机接收,或被目标反射后被接收机接收。使用从接收机接收的信号中所提取的到达角(angle of arrival,aoa)、时延(time delay,td)、时延差(difference of time delay,dtd)等测量值,实现对目标的精准定位。
2、传统的多基地定位系统,通常采用多个接收机捕获由目标反射的信号。然而,处理来自多个接收机的信号的集成和同步需要精确的校准和同步,这导致了系统复杂性高、计算负担大和潜在误差源多等问题。此外,为确保信号处理和定位的精确性,需要精心部署多个接收机,这也是一个技术上的重大挑战。相较之下,单接收机定位系统具有明显的优势。其中一个显著的优点是,单接收机定位系统因其部署特性,拥有更加简单的系统设计、更低的功耗以及更好的便携性。此外,单接收机定位系统通常表现出对信号干扰的鲁棒性,因为它们受到多径传播和同步问题的影响较小,而这些问题可能困扰多接收机定位系统。这种简化不仅有利于系统的快速部署,而且有助于提高成本效益。在资源受限或需要简化操作的情况下,单接收机定位系统可能尤为有利。
3、当多基地定位系统中只使用一个发射机时,只能在接收机是移动的情况下实现点定位,否则只能估计目标的到达方位(direction of arrival)而无法估计其具体位置。基于非视距传播环境的先验信息,有方法使用到达时间差进行多目标的点定位,但实践中非视距传播环境的先验信息难以获取。幸运的是,实测实验表明混合时间和角度测量信息,能够在无先验信息的条件下使用单个静止的接收机实现目标具体坐标的估计。另外,实际定位场景中通常可以部署多个发射机且其位置是可以获取的。混合dtd和aoa测量信息基于单接收机的多基地多目标定位问题当前还没有研究。
技术实现思路
1、本发明所要解决的技术问题是提供一种基于单接收机的多基地多目标定位方法,其在不需要任何先验信息的前提下,使用混合dtd和aoa的测量信息实现单接收机系统中的多目标的定位,且定位精度高。
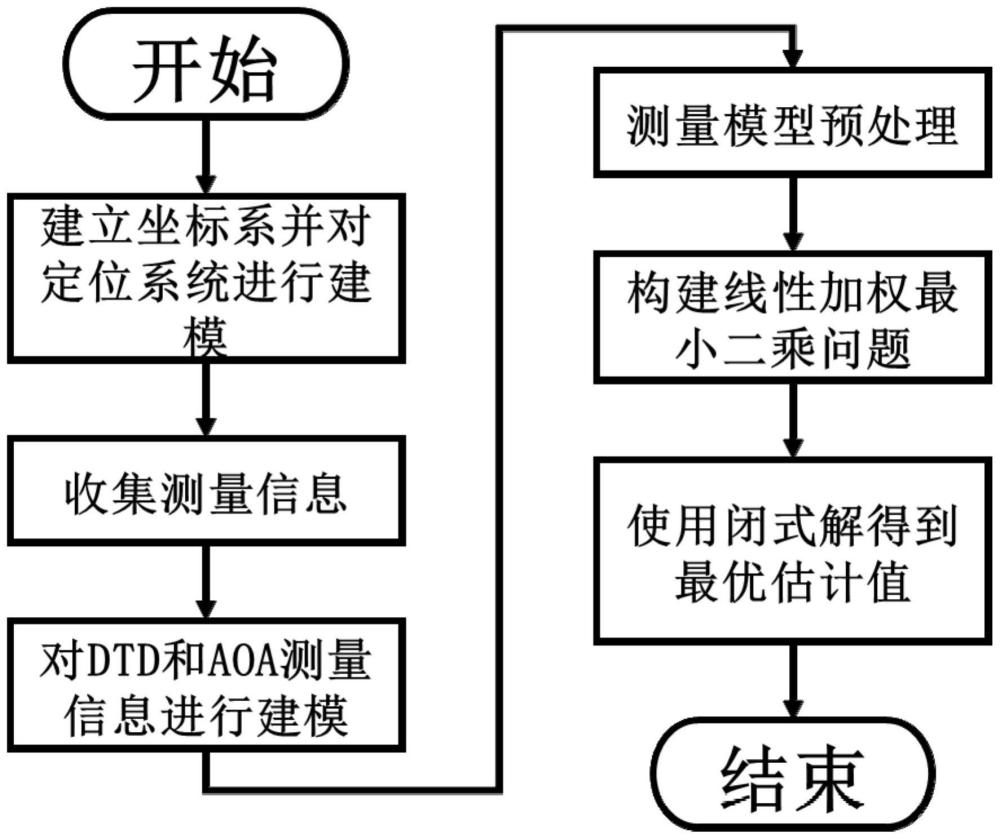
2、本发明解决上述技术问题所采用的技术方案为:一种基于单接收机的多基地多目标定位方法,其特征在于包括以下步骤:
3、步骤1:在一个多基地定位系统中,建立一个三维坐标系作为参考坐标系,设定存在一个已知位置的接收机、m个已知位置的发射机以及n个未知位置的目标,将已知位置的接收机在参考坐标系中的真实坐标位置设定为参考坐标系的原点,将第m个已知位置的发射机在参考坐标系中的真实坐标位置记为将第j个未知位置的目标在参考坐标系中的真实坐标位置记为其中,n>1,1≤j≤n,表示的横坐标,表示的纵坐标,表示的竖坐标,表示的横坐标,表示的纵坐标,表示的竖坐标,上标“t”表示向量或矩阵的转置;
4、步骤2:第m个已知位置的发射机发射的信号经过第j个未知位置的目标反射后被接收机接收,接收机从其接收的信号中提取出dtd测量值,记为接收机配备的传感器阵列采集第j个未知位置的目标到接收机反射路径的aoa测量值,包含第j个未知位置的目标到接收机反射路径的方位角测量值和俯仰角测量值,对应记为和其中,1≤j≤n;
5、步骤3:构建已知位置的发射机发射的信号经过未知位置的目标的反射路径的dtd测量模型,描述为:构建未知位置的目标到接收机的反射路径的aoa测量模型,描述为:其中,为第m个已知位置的发射机发射的信号经过第j个未知位置的目标的反射路径上受测量噪声污染的dtd测量值,表示第m个已知位置的发射机发射的信号经过第j个未知位置的目标的反射路径上不受测量噪声污染的dtd测量值,表示第m个已知位置的发射机发射的信号经过第j个未知位置的目标的反射路径上的dtd测量噪声,为第j个未知位置的目标到接收机的反射路径上受测量噪声污染的方位角测量值,表示第j个未知位置的目标到接收机的反射路径上不受测量噪声污染的方位角测量值,表示第j个未知位置的目标到接收机的反射路径上的方位角测量噪声,为第j个未知位置的目标到接收机的反射路径上受测量噪声污染的俯仰角测量值,表示第j个未知位置的目标到接收机的反射路径上不受测量噪声污染的俯仰角测量值,表示第j个未知位置的目标到接收机的反射路径上的俯仰角测量噪声,符号“||||”为二范数符号;
6、步骤4:对步骤3构建的已知位置的发射机发射的信号经过未知位置的目标的反射路径的dtd测量模型进行预处理:将等价转换为然后对等价转换模型的等式左右两边同时平方,并忽略其中的二阶噪声项,得到变换模型,描述为:接着根据将表示为将代入变换模型中,得到:再将用代入,并使用一阶泰勒展开,得到预处理后的已知位置的发射机发射的信号经过未知位置的目标的反射路径的dtd测量模型,描述为:
7、对步骤3构建的未知位置的目标到接收机的反射路径的aoa测量模型进行预处理:
8、(1)将等价转换为然后对等价转换模型中的和使用一阶泰勒展开,得到一阶泰勒展开式:和再将两个一阶泰勒展开式代入等价转换模型中,得到预处理后的未知位置的目标到接收机的反射路径的方位角测量模型,描述为:
9、(2)将等价转换为然后将等价转换模型中的用代入,并使用一阶泰勒展开,得到一阶泰勒展开式:以及再将四个一阶泰勒展开式代入等价转换模型中,得到预处理后的未知位置的目标到接收机的反射路径的俯仰角测量模型,描述为:
10、步骤5:联立步骤4得到的预处理后的已知位置的发射机发射的信号经过未知位置的目标的反射路径的dtd测量模型、预处理后的未知位置的目标到接收机的反射路径的方位角测量模型、预处理后的未知位置的目标到接收机的反射路径的俯仰角测量模型,构建线性加权最小二乘问题,描述为:其中,min()为取最小值函数,y为优化变量,表示未知位置的目标的位置变量,((ay+b)tw(ay+b))为线性加权最小二乘问题的目标函数,b为引入的系数向量,中的第(m-1)n+j个元素为0n表示维数为n×1的全0列向量,a为引入的系数矩阵,中的第(m-1)n+j行元素构成的向量为03(j-1)表示维数为3(j-1)×1的全0列向量,03(n-j)表示维数为3(n-j)×1的全0列向量,中的第j行元素构成的向量为中的第j行元素构成的向量为w为引入的权重矩阵,w=e[bn(bn)t]-1=(bqbt)-1,b为引入的系数矩阵,中的第(m-1)n+j行元素构成的向量为0(m-1)n+j-1表示维数为((m-1)n+j-1)×1的全0列向量,表示维数为的全0列向量,0n-j表示维数为(n-j)×1的全0列向量,bθu中的第j行元素构成的向量为表示维数为的全0列向量,02n-j表示维数为(2n-j)×1的全0列向量,中的第j行元素构成的向量为0n-1表示维数为(n-1)×1的全0列向量,e[]为期望求取符号,n表示测量噪声向量,n服从均值为0且协方差矩阵为q的高斯分布,q表示n的协方差矩阵,服从均值为0且协方差矩阵为的高斯分布,服从均值为0且协方差矩阵为的高斯分布,服从均值为0且协方差矩阵为的高斯分布,blkdiag()为求块对角矩阵函数;
11、步骤6:步骤5得到的线性加权最小二乘问题的最优解通过求得,进而得到uj的最优估计值,记为其中,为y的最优解,表示中的第3(j-1)+1个元素至第3j个元素构成的向量。
12、与现有技术相比,本发明的优点在于:
13、1)现有的多基地多目标定位方法多使用时间测量信息,这种多目标定位方法存在数据关联问题难以处理,而本发明方法使用角度信息可以直接区分各信号的来源,不存在数据关联问题。
14、2)现有的多基地定位方法多使用多个已知位置的接收机对目标进行观测,而多个接收机的定位系统对接收机位置的集合分布要求较高,且数据融合、时钟同步等问题会造成很大的计算复杂度,而单接收机的定位系统对传感器部署和硬件的要求更低,这也使得其计算复杂度更低且其系统设计更简单。
15、3)现有的基于单接收机的多目标定位方法需要非视距传播环境的先验信息才可以实现定位,而非视距传播环境的先验信息难以获取,本发明方法在不需要任何先验信息的条件下,即可完成多目标定位。
16、4)现有的多基地定位使用非线性的时间测量模型进行定位,而非线性优化问题的求解往往需要更高的计算复杂度。本发明方法将角度测量信息巧妙地融合进距离测量信息中,将原本复杂非线性的测量模型转化为关于目标位置的线性模型,使得原本复杂的定位问题能够使用计算复杂度很低的闭式解方法进行求解,且在仅使用单个接收机的情况下,仍然能够实现任意多个目标的高精度定位。
17、5)本发明方法的实验结果表明其可以达到克拉美-罗下界(crlb)的目标定位精度的,具有稳定的性能表现,即使在测量噪声功率较大时,仍表现出其鲁棒的定位性能。
- 还没有人留言评论。精彩留言会获得点赞!