一种分布式雷达引导光电跟踪识别装置及方法
本发明涉及目标跟踪识别领域,具体涉及一种分布式雷达引导光电跟踪识别装置及方法。
背景技术:
1、随着无人机技术的发展,地空协作在例如地形勘探、工程建设和交通指挥等多个领域得到了应用。在空地协作中光电跟踪装置通常与雷达配合使用来对无人机进行目标跟踪识别,利用光电跟踪装置和雷达的优势互补,可以实现对无人机等“低慢小目标”的有效探测、识别。然而在实际工程中,由于光电跟踪装置和雷达均需要全方位探测,因此工作过程中经常会发生工作视场遮蔽问题,极大限制了对于目标跟踪识别范围。虽然现有技术中,对光电跟踪装置和雷达采用共架设计虽然可以解决遮蔽问题,但二者在转动过程中存在相互扰动影响,从而降低目标跟踪识别的精度。
技术实现思路
1、有鉴于此,有必要提供一种分布式雷达引导光电跟踪识别装置及方法,用于解决现有技术中,由于光电跟踪装置和雷达之间存在工作视场遮蔽,因此限制了目标跟踪识别范围的技术问题。
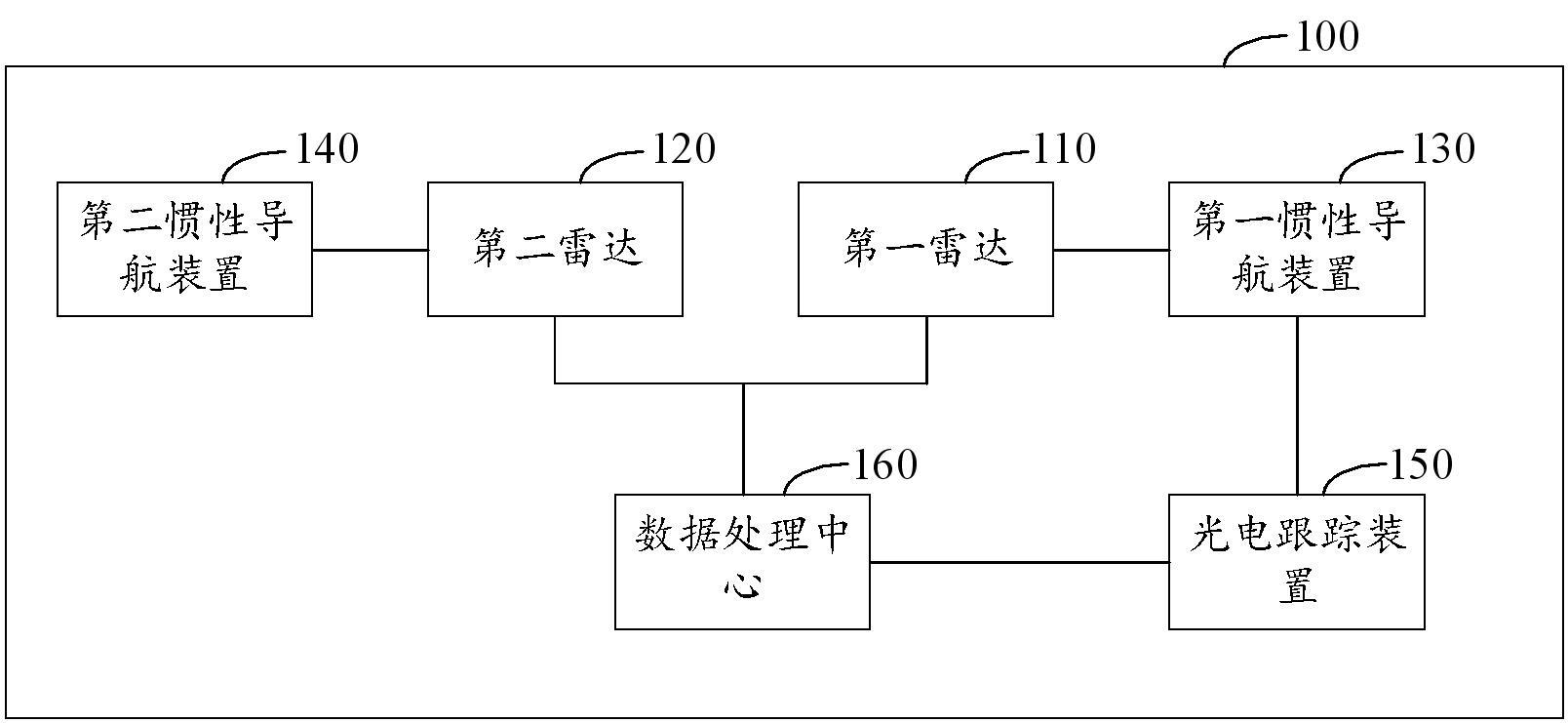
2、一方面,本发明提供了一种分布式雷达引导光电跟踪识别装置,包括:第一雷达、第二雷达、第一惯性导航装置、第二惯性导航装置、光电跟踪装置和数据处理中心,第一雷达和光电跟踪装置与第一惯性导航装置相连接,第二雷达与第二惯性导航装置相连接,第一雷达、第二雷达和光电跟踪装置与数据处理中心相连接,其中:
3、第一雷达和第二雷达用于获取待跟踪目标的运动状态信息;
4、第一惯性导航装置用于获取第一雷达和光电跟踪装置的第一惯性测量数据;
5、第二惯性导航装置用于获取第二雷达的第二惯性测量数据;
6、数据处理中心用于根据待跟踪目标的运动状态信息、第一惯性测量数据和/或第二惯性测量数据进行数据解算得到待跟踪目标的实时球坐标值;
7、光电跟踪装置用于根据实时球坐标值对待跟踪目标进行跟踪识别。
8、进一步的,装置还包括雷达交换机,雷达交换机与第一雷达、第二雷达和数据处理中心相连,用于实现第一雷达和第二雷达与数据处理中心之间的数据交互和指令控制。
9、进一步的,第一惯性导航装置和第二惯性导航装置为安装在运载体上的捷联式三轴惯性测量设备,光电跟踪装置为粗精复合轴成像跟踪设备。
10、进一步的,第一雷达预设有第一方位角范围,第二雷达预设有第二方位角范围,且第一雷达的第一方位角范围和第二雷达的第二方位角范围对应覆盖区域不包括光电跟踪装置所在区域。
11、另一方面,本发明还提供了一种分布式雷达引导光电跟踪识别方法,应用于上述的分布式雷达引导光电跟踪识别装置,包括:
12、基于第一雷达和/或第二雷达捕获待跟踪目标的跟踪轨迹信息;
13、基于第一惯性导航装置和/或第二惯性导航装置获取惯性测量数据;
14、根据跟踪轨迹信息和惯性测量数据进行数据解算得到待跟踪目标的实时球坐标值;
15、根据实时球坐标值调整光电跟踪装置的角度,对待跟踪目标进行跟踪识别。
16、进一步的,跟踪轨迹信息包括待跟踪目标的方位角、俯仰角、距离和速度,实时球坐标值为以光电跟踪装置基座为参考的坐标系下的坐标值。
17、进一步的,基于第一雷达和/或第二雷达获取待跟踪目标的跟踪轨迹信息,包括:
18、基于第一雷达或第二雷达扫描得到待跟踪目标的扫描数据;
19、数据处理中心根据扫描数据生成搜索轨迹,并根据搜索轨迹生成跟踪指令发送给第一雷达和/或第二雷达;
20、第一雷达和/或第二雷达根据跟踪指令对待跟踪目标进行跟踪并得到跟踪数据,数据处理中心根据跟踪数据生成跟踪轨迹信息。
21、进一步的,根据跟踪轨迹信息和惯性测量数据进行数据解算得到待跟踪目标的实时球坐标值,包括:
22、在不同参考系下构建各参考坐标系,参考坐标系包括双雷达地理坐标系和光电跟踪装置基座坐标系;
23、根据跟踪轨迹信息确定待跟踪目标在双雷达地理坐标系的球坐标值;
24、基于坐标变换将双雷达地理坐标系的球坐标值转换为光电跟踪装置基座坐标系的实时球坐标值。
25、进一步的,各参考坐标系还包括光电跟踪装置地理坐标系,基于坐标变换将雷达地理坐标系的球坐标值转换为光电跟踪装置基座坐标系的实时球坐标值,包括:
26、根据双雷达地理坐标系的球坐标值得到待跟踪目标在双雷达地理坐标系的直角坐标值;
27、根据双雷达地理坐标系的直角坐标值得到待跟踪目标在光电跟踪装置地理坐标系的直角坐标值;
28、根据光电跟踪装置地理坐标系的直角坐标值得到待跟踪目标在光电跟踪装置基座坐标系的直角坐标值;
29、对光电跟踪装置基座坐标系的直角坐标值进行数据平滑处理和补偿俯仰码盘零位后得到待跟踪目标在光电跟踪装置基座坐标系的球坐标值。
30、进一步的,光电跟踪装置包括伺服转台、粗跟踪红外相机和精跟踪可见相机,根据实时球坐标值调整光电跟踪装置的角度,对待跟踪目标进行跟踪识别,包括:
31、伺服转台根据实时球坐标值带动粗跟踪红外相机和精跟踪可见相机转动到实时球坐标值所在位置;
32、基于粗跟踪红外相机对待跟踪目标进行闭环跟踪;
33、基于精跟踪可见相机对待跟踪目标进行目标识别。
34、与现有技术相比,采用上述实施例的有益效果是:本发明通过分布式雷达布局设计,在避免雷达和光电跟踪装置转动扰动影响的前提下,实现对目标的全方位跟踪识别,并通过对应的分布式雷达光电跟踪识别方法进行实时解算得到准确的待跟踪目标的实时球坐标值,提高目标跟踪识别的精度。
技术特征:
1.一种分布式雷达引导光电跟踪识别装置,其特征在于,包括:第一雷达、第二雷达、第一惯性导航装置、第二惯性导航装置、光电跟踪装置和数据处理中心,所述第一雷达和光电跟踪装置与所述第一惯性导航装置相连接,所述第二雷达与所述第二惯性导航装置相连接,所述第一雷达、第二雷达和光电跟踪装置与数据处理中心相连接,其中:
2.根据权利要求1所述的分布式雷达引导光电跟踪识别装置,其特征在于,所述装置还包括雷达交换机,所述雷达交换机与所述第一雷达、所述第二雷达和所述数据处理中心相连,用于实现所述第一雷达和所述第二雷达与所述数据处理中心之间的数据交互和指令控制。
3.根据权利要求1所述的分布式雷达引导光电跟踪识别装置,其特征在于,所述第一惯性导航装置和所述第二惯性导航装置为安装在运载体上的捷联式三轴惯性测量设备,所述光电跟踪装置为粗精复合轴成像跟踪设备。
4.根据权利要求1所述的分布式雷达引导光电跟踪识别装置,其特征在于,所述第一雷达预设有第一方位角范围,第二雷达预设有第二方位角范围,且所述第一雷达的第一方位角范围和所述第二雷达的第二方位角范围对应覆盖区域不包括光电跟踪装置所在区域。
5.一种分布式雷达引导光电跟踪识别方法,应用于权利要求1-4任意一项所述的分布式雷达引导光电跟踪识别装置,其特征在于,所述方法包括:
6.根据权利要求5所述的分布式雷达引导光电跟踪识别方法,其特征在于,所述跟踪轨迹信息包括待跟踪目标的方位角、俯仰角、距离和速度,所述实时球坐标值为以光电跟踪装置基座为参考的坐标系下的坐标值。
7.根据权利要求5所述的分布式雷达引导光电跟踪识别方法,其特征在于,所述基于所述第一雷达和/或第二雷达获取待跟踪目标的跟踪轨迹信息,包括:
8.根据权利要求5所述的分布式雷达引导光电跟踪识别方法,其特征在于,所述根据所述跟踪轨迹信息和所述惯性测量数据进行数据解算得到待跟踪目标的实时球坐标值,包括:
9.根据权利要求8所述的分布式雷达引导光电跟踪识别方法,其特征在于,所述各参考坐标系还包括光电跟踪装置地理坐标系,所述基于坐标变换将所述雷达地理坐标系的球坐标值转换为光电跟踪装置基座坐标系的实时球坐标值,包括:
10.根据权利要求5所述的分布式雷达引导光电跟踪识别方法,其特征在于,所述光电跟踪装置包括伺服转台、粗跟踪红外相机和精跟踪可见相机,所述根据所述实时球坐标值调整所述光电跟踪装置的角度,对所述待跟踪目标进行跟踪识别,包括:
技术总结
本发明涉及一种分布式雷达引导光电跟踪识别装置及方法,其中装置包括:第一雷达、第二雷达、第一惯性导航装置、第二惯性导航装置、光电跟踪装置和数据处理中心,本发明通过第一雷达和/或第二雷达捕获待跟踪目标的跟踪轨迹信息;通过第一惯性导航装置和/或第二惯性导航装置获取惯性测量数据;根据跟踪轨迹信息和惯性测量数据进行数据解算得到待跟踪目标的实时球坐标值;根据实时球坐标值调整光电跟踪装置角度,对待跟踪目标进行跟踪识别。与现有技术相比,本发明通过分布式雷达布局设计,在避免雷达和光电跟踪装置转动扰动影响前提下,实现对目标的全方位跟踪识别,并通过分布式雷达光电跟踪识别方法实时解算得到准确的待跟踪目标实时球坐标值。
技术研发人员:潘浩,陈泽洋,洪汉玉,田斌,卓旭升,姚贞建,宋金霖
受保护的技术使用者:武汉工程大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!