基于北斗/UWB云端数据处理的快速静态测量放样系统的制作方法
本发明属于静态测量放样系统,具体涉及一种基于北斗/uwb云端数据处理的快速静态测量放样系统。
背景技术:
1、随着我国北斗三号系统组网完成,北斗系统在各个行业都得到了广泛应用,尤其是在工程测量放样领域,基于北斗的精密定位技术可以获得厘米级的定位精度,提高了放样的效率。
2、国内在此技术方面已经开展了较多的研究,取得了一些技术突破,研制了实验软件,但相比于国外以及实际应用需求来说,还有许多不足:
3、在桥梁、道路等施工放样场景,放样的精度要求毫米级的精度,由于作业环境等影响,北斗相对定位技术定位精度显著降低,尤其是高程方向。
技术实现思路
1、本发明的目的在于提供基于北斗/uwb云端数据处理的快速静态测量放样系统,用于解决现有技术中放样精度不高和可靠性较低的技术问题。
2、为了实现上述目的,本发明采用了如下技术方案:
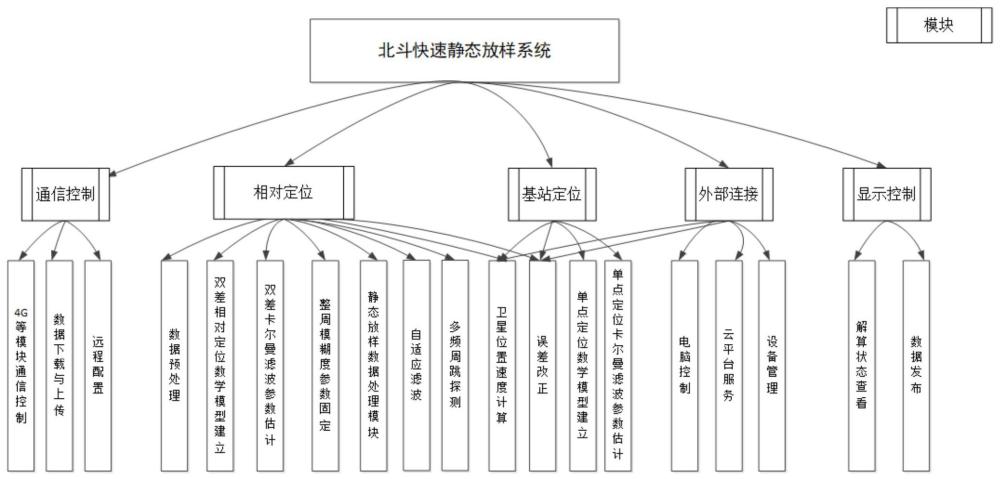
3、基于北斗/uwb云端数据处理的快速静态测量放样系统,该系统包括通信控制模块、gnss/uwb融合定位模块、基站定位模块、外部连接模块和显示控制模块;
4、通信控制模块用于系统与外部通信和数据交互,包括4g等模块通信控制、数据下载与上传、远程配置功能,该模块与其他模块之间建立通信通道,接收来自基站定位模块的基站位置信息,并将其传递给gnss/uwb融合定位模块;
5、gnss/uwb融合定位模块用于实现融合定位功能,确定移动终端的位置,包括gnss基准站、uwb基准站、uwb/rtk测量终端、云端gnss数据处理单元;
6、基站定位模块用于确定基站的位置信息,包括卫星位置速度计算、误差改正、单点定位数学模型的建立和单点定位卡尔曼滤波参数估计功能,该模块通过接收卫星信号和其他测量数据,计算基站的位置信息,并将其传递给gnss/uwb融合定位模块;
7、外部连接模块用于连接系统与外部设备和服务,包括电脑控制、云平台服务和设备管理功能,该模块提供与电脑和云平台服务的连接,用于控制系统、管理设备和获取云端数据;
8、显示控制模块用于显示解算状态和发布数据,包括解算状态查看和数据发布等功能,该模块用于监视系统解算状态,接收gnss/uwb融合定位模块的解算状态信息,并将结果数据发布给用户或其他系统。
9、优选地,基于北斗/uwb云端数据处理的快速静态测量放样系统提供了gnss/uwb融合定位模块,其中模块功能具体步骤如下:
10、步骤s1:云端服务器获取gnss/uwb的原始观测数据;
11、步骤s2:gnss站网数据解算;
12、步骤s3:线性化观测方程;
13、步骤s4:kalman滤波估计;
14、步骤s5:整周模糊度搜索;
15、步骤s6:uwb测距融合提高放样精度;
16、步骤s7:输出解算结果信息;
17、步骤s8:开始下一历元处理流程。
18、优选地,gnss数据包括卫星接收机代码、信号到达时间、接收机钟差和信号强度信息。
19、优选地,gnss数据预处理方法,具体步骤如下:
20、步骤s21:接收gnss数据,用于在后续过程中对数据进行处理;
21、步骤s22:通过基于多频gnss观测值的周跳探测与修复方法,对gnss数据进行周跳探测与修复;
22、步骤s23:通过顾及电离层变化的周跳探测与修复方法,对观测数据进行补充修复。
23、进一步地,基于多频gnss观测值的周跳探测与修复方法具体步骤如下:
24、步骤s221:获取多频gnss接收机的观测数据,包括伪距和载波相位观测值;
25、步骤s222:对于每颗卫星,计算不同频率间的载波相位差分值;
26、步骤s223:对载波相位差分进行平滑处理;
27、步骤s224:对平滑后的载波相位差分进行周跳探测,根据多频观测值信息,构建满足geo-free特性的线性组合,在满足geo-free特性的线性组合基础上,进行历元间差分,通过比较当前差分值与预定义阈值或差分历史数据来确定是否存在周跳;
28、步骤s225:如果探测到周跳,进行周跳修复;
29、步骤s226:重复以上步骤,对其他卫星进行周跳探测和修复。
30、更进一步地,在步骤s225中,周跳修复方法具体为:通过对周跳前后的载波相位差分进行插值,同时进行组合滤波,将观测值与历史数据进行联合估计,以获得更准确的载波相位修复值。
31、进一步地,在步骤s23中,考虑到在电离层变化较快影响较大的情况下,采用顾及电离层变化的周跳探测与修复方法,即考虑电离层变化的mw组合和电离层tec变化率,具体步骤如下:
32、步骤s231:获取双频gnss接收机的l1和l2频段的载波相位观测值;
33、步骤s232:计算mw组合;
34、其中,mw组合是一种线性组合,通过l1和l2频段的载波相位观测值消除了接收机钟差和大部分电离层延迟的影响;
35、mw组合的计算公式如下:
36、
37、其中,mw是mw组合值,λ1和λ2是l1和l2波长。
38、步骤s233:估计电离层tec变化率;
39、其中,电离层tec变化率是电离层延迟的导数,可以通过mw组合值的差分来估计,计算公式如下:
40、δtec=(mw(t)-mw(t-1))/(λ1-λ2)
41、其中,δtec是电离层tec变化率,mw(t)和mw(t-1)分别是当前时刻和前一时刻的mw组合值;
42、步骤s234:进行周跳探测;
43、其中,周跳探测基于电离层tec变化率的阈值判定,当估计的电离层tec变化率超过预设阈值时,表示出现了周跳;
44、步骤s235:如果探测到周跳,进行周跳修复;
45、在考虑电离层变化的情况下,可以通过对mw组合值进行插值并考虑电离层tec变化率来修复周跳;
46、其中,插值时可以使用估计的电离层tec变化率进行补偿,以减小电离层引起的误差;
47、步骤s236:重复以上步骤,对其他卫星进行周跳探测和修复。
48、优选地,提供了建立gnss/uwb融合定位数学模型的方法;
49、进一步地,根据bds/gps系统双差,建立gnss/uwb融合定位的函数模型。
50、进一步地,gnss/uwb融合定位数学模型包括函数模型和随机模型。
51、进一步地,根据bds/gps双差建立gnss/uwb融合定位函数模型可以表示为:
52、δρ=(ρ1_bds-ρ1_gps)-(ρ2_bds-ρ2_gps)=δξ+δn+δε
53、其中,δρ是接收机之间的双差观测量的几何距离差,ρ1_bds和ρ1_gps分别是两个接收机在bds和gps系统中接收到的卫星信号的几何距离,ρ2_bds和ρ2_gps分别是另外两个接收机在bds和gps系统中接收到的卫星信号的几何距离,δξ是相对位置的三维坐标差,δn是整周模糊度的差,δε是误差项,包括钟差、轨道误差、电离层延迟、对流层延迟等。
54、进一步地,根据bds/gps双差建立gnss/uwb融合定位随机模型的具体步骤如下:
55、步骤s31:建立观测值权阵;
56、步骤s32:建立卫星观测值权阵;
57、步骤s33:建立观测值协方差阵。
58、综上所述,由于采用了上述技术方案,本发明的有益效果是:
59、1、gnss数据预处理有助于提高相对定位的准确性,通过对原始数据进行滤波、去除异常值和噪声等处理,可以提高数据的质量,减少误差对定位结果的影响,从而提高相对定位的精度和稳定性。
60、2、通过建立双差相对定位数学模型,可以消除大部分系统误差和环境误差的影响,从而提高相对定位的精度,该模型考虑了卫星和接收机的误差变化,并通过差分处理消除了共同误差,使得定位结果更加准确。
61、3、卡尔曼滤波算法进行实数求解可以根据历史数据和观测值来估计系统的状态,并提供最优的状态估计结果,在相对定位中,双差卡尔曼滤波可以估计移动终端的位置参数,并对定位结果进行优化和平滑处理,提高定位的准确性和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!