一种基于BDS辅助的GLONASS频间偏差实时估计方法与流程
本发明涉及glonass(global navigation satellite system, 全球导航卫星系统) 载波相位差分,具体涉及一种基于bds辅助的glonass频间偏差实时估计方法。
背景技术:
1、bds与glonass联合应用逐渐成为研究热点,与bds不同,glonass采用频分多址技术,每颗卫星发射频率不一样,而不同频率的卫星信号会进入接收机内部会存在不同的接收机器件群波延迟差异,即不同的伪距和载波相位频间偏差(inter-frequency bias,ifb),传统的双差伪距和载波相位模型不能消除ifb,影响着bds和glonass联合高精度解算,主要影响了模糊度的固定,降低了高精度定位性能。
2、由于接收机品牌种类繁多,客户可能经常使用不同品牌接收机测量,这使得glonass的模糊度固定变得更加困难。当前国内主要采用bds或gps进行精密定位解算,如果能够将glonass卫星加入进去,那么卫星数目的增加和不同频点观测值的增加所带来数据量的提升,可以有效地提高卫导性能,提高rtk测量的可靠性、可用性和适用范围。
3、目前针对glonass频间偏差处理方法,主要思想是利用零基线或短基线预先求出频间偏差值,作为改正数修正观测量。但该方法时效性较差,很难满足客户实时高精度定位和对频间偏差快速标定的需求。
技术实现思路
1、针对现有技术中的上述不足,本发明提供了一种基于bds辅助的glonass频间偏差实时估计方法。
2、为了达到上述发明目的,本发明采用的技术方案为:
3、一种基于bds辅助的glonass频间偏差实时估计方法,包括以下步骤:
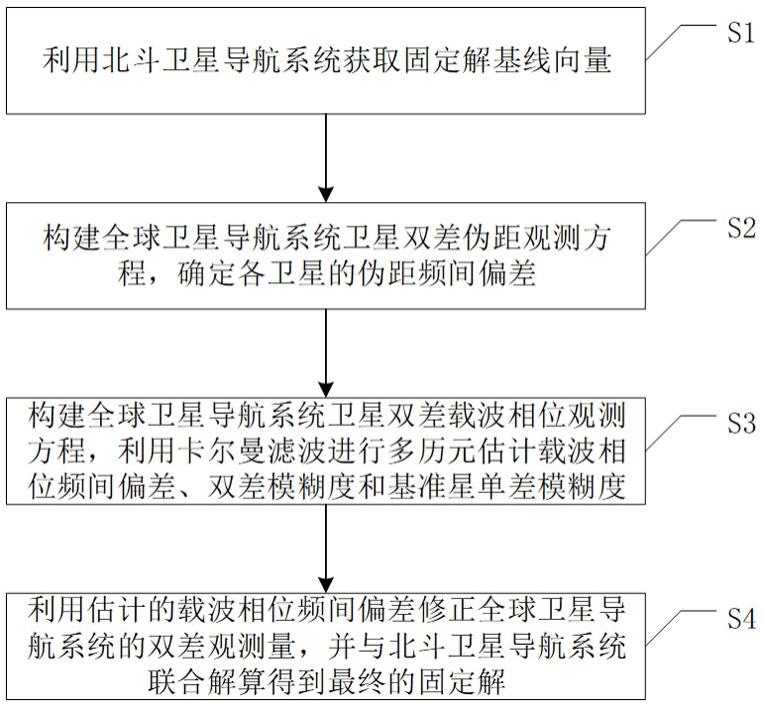
4、利用北斗卫星导航系统获取固定解基线向量;
5、构建全球卫星导航系统卫星双差伪距观测方程,确定各卫星的伪距频间偏差;
6、构建全球卫星导航系统卫星双差载波相位观测方程,利用卡尔曼滤波进行多历元估计载波相位频间偏差、双差模糊度和基准星单差模糊度;
7、利用估计的载波相位频间偏差修正全球卫星导航系统的双差观测量,并与北斗卫星导航系统联合解算得到最终的固定解基线向量。
8、进一步地,所述利用北斗卫星导航系统获取固定解基线向量具体包括以下步骤:
9、利用北斗卫星导航系统获取固定解基线向量,并存储双差模糊度;
10、对各个历元下使用固定模糊度的卫星观测值采用最小二乘法解算基线;
11、采用固定解基线反算所有卫星观测值模糊度,并剔除残差超过设定阈值的卫星;
12、利用筛选后的卫星重新解算固定解基线,得到bds固定解基线向量。
13、进一步地,所述构建全球卫星导航系统卫星双差伪距观测方程,确定各卫星的伪距频间偏差,具体包括以下步骤:
14、设定为短基线,忽略双差对流层残差、双差电离层残差以及轨道误差,对每个历元的卫星形成伪距双差观测方程;
15、利用导航电文计算卫星位置,并根据北斗卫星导航系统获取的固定解基线向量计算双差星地距;
16、根据伪距双差观测方程计算各卫星的伪距频间偏差。
17、进一步地,所述伪距双差观测方程具体为:
18、,
19、其中,u为用户站接收机,b为基准站接收机,i为卫星号,j为基准卫星号,为用户站接收机u和基准站接收机b对卫星i的单差伪距观测值,为用户站接收机u和基准站接收机b对基准卫星j的单差伪距观测值,为用户站接收机u和基准站接收机b对卫星i和基准卫星j的双差卫地距,为用户站接收机u为用户站接收机b间的频间偏差斜率,为用户站接收机u和基准站接收机b对卫星i和基准卫星j的伪距双差观测噪声,为卫星i的频点号,为基准卫星j的频点号。
20、进一步地,所述伪距频间偏差的计算公式为:
21、,
22、其中,为用户站接收机u和基准站接收机b间的频间偏差斜率,为用户站接收机u和基准站接收机b对卫星i的单差伪距观测值,为用户站接收机u和基准站接收机b对基准卫星j的单差伪距观测值,为用户站接收机u和基准站接收机b对卫星i和基准卫星j的双差卫地距,为用户站接收机u和基准站接收机b对卫星i和基准卫星j的伪距双差观测噪声。
23、进一步地,所述构建全球卫星导航系统卫星双差载波相位观测方程,利用卡尔曼滤波进行多历元估计载波相位频间偏差、双差模糊度和基准星单差模糊度,具体包括以下步骤:
24、设定为短基线,忽略双差对流层残差、双差电离层残差以及轨道误差,对每个历元的卫星形成双差载波相位观测方程;
25、以每对全球卫星导航系统卫星的双差模糊度、基准星单差模糊度和接收机载波相位频间偏差构建卡尔曼滤波模型的状态向量;
26、根据卡尔曼滤波模型的状态向量构建卡尔曼滤波的状态方程和观测方程,经过多历元卡尔曼滤波计算得到双差模糊度浮点解、单差模糊度浮点解和载波相位频间偏差初值;
27、采用最小二乘模糊度降相关法固定双差模糊度;
28、根据固定双差模糊度后求解出的连续接收机载波相位频间偏差观测值的平均值确定载波相位频间偏差的标定值。
29、进一步地,所述双差载波相位观测方程具体为:
30、,
31、其中,u为用户站接收机,b为基准站接收机,i为卫星号,j为基准卫星号,基准星为高度角最高的卫星,为卫星i的波长,为基准卫星j的波长,为用户站接收机u和基准站接收机b对卫星i的单差相位观测值,为用户站接收机u和基准站接收机b对基准卫星j的单差相位观测值,为用户站接收机u和基准站接收机b对卫星i和基准卫星j的双差卫地距,为用户站接收机u和基准站接收机b对卫星i和基准卫星j的双差模糊度,为用户站接收机u和基准站接收机b对基准卫星j的单差模糊度,为用户站接收机u和基准站接收机b间的频间偏差斜率,为用户站接收机u和基准站接收机b对卫星i和基准卫星j的载波双差观测噪声。
32、进一步地,所述卡尔曼滤波模型的状态向量具体为:
33、,
34、其中,为卡尔曼滤波模型的状态向量,为卫星i和基准卫星j的双差整周模糊度,为卫星i+1和基准卫星j的双差整周模糊度,为卫星n-1和基准卫星j的双差整周模糊度,为基准卫星j的单差整周模糊度,为用户站接收机u和基准站接收机b间的频间偏差斜率。
35、进一步地,所述卡尔曼滤波的状态方程和观测方程具体为:
36、,
37、,
38、其中,为第k历元的卡尔曼滤波模型状态向量,为从第k-1历元到第k历元的卡尔曼滤波模型状态转移矩阵,为第k-1历元的卡尔曼滤波模型状态向量,为第k-1历元的卡尔曼滤波模型动态噪声向量,为第k历元的卡尔曼滤波模型观测量向量,为第k历元的卡尔曼滤波模型系数阵,为第k历元的卡尔曼滤波模型观测噪声向量。
39、进一步地,所述卡尔曼滤波模型的计算公式为:
40、,
41、,
42、,
43、,
44、,
45、其中,为在第k-1历元的状态量的基础上,利用状态转移矩阵来预测第k历元的状态量,为从第k-1历元到第k历元的卡尔曼滤波模型状态转移矩阵,为第k-1历元的状态量,历元的状态量,为状态一步预测状态均方误差阵,为第k-1历元的状态均方误差矩阵,t为转置矩阵,为第k-1历元的过程噪声,为第k历元的增益矩阵,为第k历元的观测矩阵,为第k历元的观测量协方差矩阵,为第k历元的状态量,为第k历元的观测向量,为第k历元的状态均方误差矩阵。
46、本发明具有以下有益效果:
47、本发明提出一种基于bds辅助的glonass频间偏差实时估计方法,较好的解决了glonass接收机频间偏差实时估计的问题,由于每次观测前环境(如温度变化)、接收机和天线状态(如使用年数较长)、天线连接线长度以及接收机的重启等因素,可能会对频间偏差ifb产生影响,传统的零基线或短基线法无实时性解决,无法满足客户对glonass接收机实时ifb标定的需求,本发明通过获得bds固定解基线向量计算glonass星地距,利用卡尔曼滤波对glonass模糊度参数和ifb进行多历元估计,待双差模糊度固定后,取多历元ifb平均值作为频间偏差的标定值,精度较高,时效性较好,准确性较高。本发明在接收机使用过程中,若出现滤波初始化等情况,无需重复解算ifb,可直接修正glonass观测量与bds联合解算,实现了bds和glonass的融合,加快rtk固定速度,保证了rtk的高精度。
- 还没有人留言评论。精彩留言会获得点赞!