一种计算电力导线上任意点高程的方法与流程
本发明涉及一种计算电力导线上任意点高程的方法,属于工程测绘领域,用于电力交通、水利等行业中有关勘察、测绘、野外调绘等的涉及方案跨越或钻越现有电力线(或通讯线)等需要测量跨越点高程的情况。
背景技术:
1、在国网公司全面推进线路三维正向设计的背景下,线路在可研阶段需要到达初步设计的精度,但是由于线路路径方案的不确定性,导致线路与其它交叉跨越(主要是电力线、通讯线)的交叉点位置(高程)不确定,外业测量跨越点与优化后路径方案位置可能不一致,需要重新到外业现场重新测量,在平原地区,现有电力线路更多,大大增加了外业工作量,也降低了设计效率。
2、目前项目上常用的测量交叉跨越导线高程的方法仍然是通过gnss确定设计线路与现有线路交叉点位置,用全站仪测量跨越点高程。如该点在隐蔽位置(例如高杆作物遮挡)或者不易到达(如山谷、池塘等)区域,跨越点的高程很难利用全站仪直接测定。另外,如果线路设计方案调整、跨越点位置改变,需要多次到现场返工测量。
技术实现思路
1、本发明为解决上述技术问题,提供一种计算电力导线上任意点高程的方法,以外业测量导线点,通过迭代平差方法拟合整条导线方程,后期无论设计方案如何变化(还在当前档距内),无需到现场再次测量,直接计算跨越点高程,为设计优化路径方案提供准确的数据支撑。
2、为解决上述技术问题,本发明所采用的技术方案是:
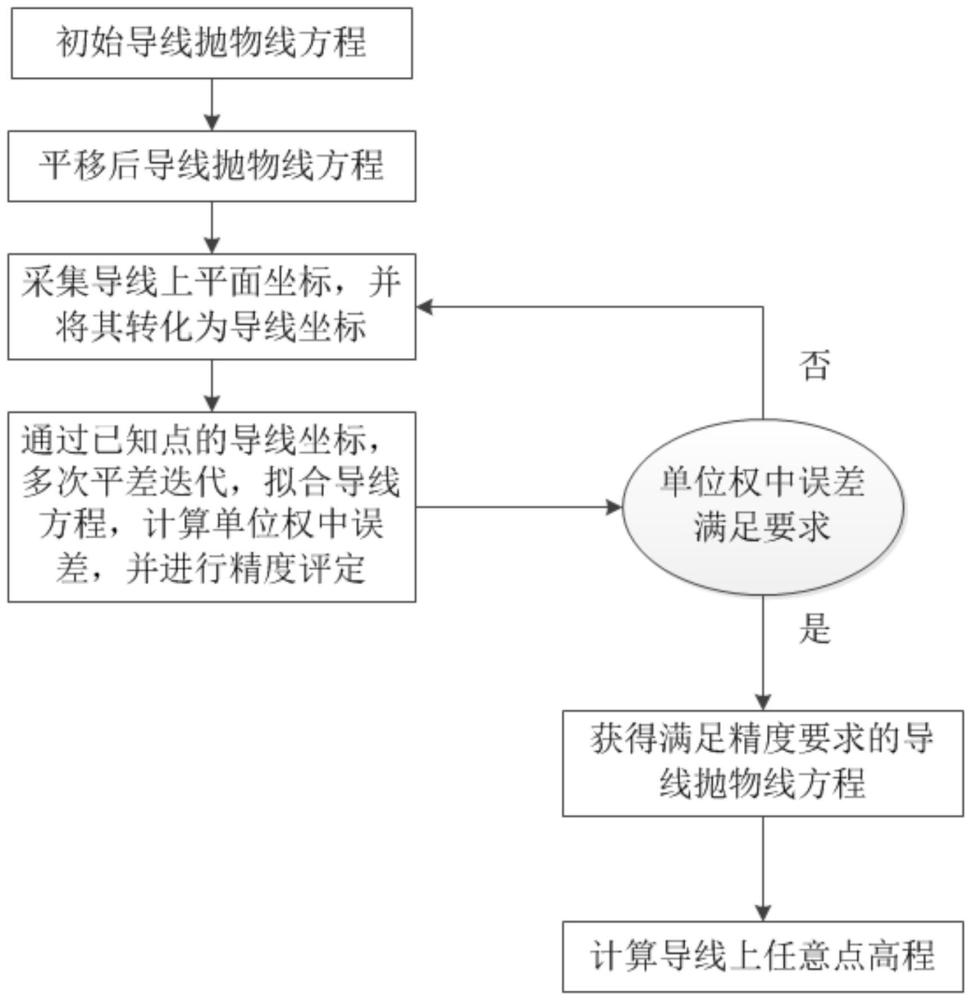
3、一种计算电力导线上任意点高程的方法,其特征在于包括如下步骤:
4、步骤s1,得到初始导线斜抛物线方程:
5、将悬垂曲线的斜抛物线方程用于悬挂点不等高时的近似计算公式,根据静力学原理,以导线最低点为坐标原点,导线方向为x轴方向,竖直向上方向为y轴方向,得到初始导线斜抛物线方程为:
6、
7、式中,σ0:导线最低点应力,mpa或n/m·mm2;
8、g:导线比载,n/m·mm2;
9、高度角;
10、步骤s2,推导便于作业的平移后导线斜抛物线方程:
11、在实际外业测量过程中,很难直接测量导线最低点位置,故将x轴平移到线路高程的“0”米面,y轴平移到与b点重叠,x-y为原坐标系,x’-y’为新坐标系:
12、令则平移后导线斜抛物线方程改写为:
13、y+yb=k(x-lob)2+hb
14、由于yb=k·lob2,进一步简化为:
15、y=k(x2-2xlob)+hb (2)
16、其中,y的物理意义为:导线上任意点线路高程值;x的物理意义为:该点到悬挂点b的水平距离;
17、步骤s3,采集导线上的多个点c1、c2…cn的平面坐标,并根据平面坐标计算得到其导线坐标(x1,y1),(x2,y2)…(xn,yn);其中,采集的多个点包含两端的挂线点;
18、步骤s4,选取步骤s3中任意三个点的导线坐标带入公式(2)中得到平移后导线斜抛物线方程的参数初值k0、lob0、hb0,并进行多次平差迭代不断修正参数值,拟合导线方程,并进行精度评定,判断单位权中误差σ是否满足要求,若满足要求则将满足要求的参数值带入公式(2)中得到满足精度要求的导线斜抛物线方程;若不满足要求则重新返回步骤s3,补充测量导线上的点,重复解算,直至单位权中误差σ满足要求;
19、步骤s5,根据步骤s4中的满足精度要求的导线斜抛物线方程及导线上任意测量点到b点的距离,即可计算该点的高程值。
20、本发明技术方案的进一步改进在于:所述步骤s1的前提条件是因为悬挂在杆塔上的一档导线,档距大、导线长,因此导线材料的刚性对其几何形状的影响很小,故假定:
21、1)导线为理想的柔索,只承受轴向张力,任意一点的弯矩为零;
22、2)作用在导线上的荷载均指向同一方向,且沿导线均匀分布。
23、本发明技术方案的进一步改进在于:所述步骤s3采用gnss+全站仪或经纬仪外业数据采集方案;gnss设备只需测量三个点的线路坐标和高程,全站仪或经纬仪只需记录水平角和垂直角;
24、z点为任意全站仪或经纬仪架站点,其线路坐标和高程直接用gnss采集获得;a、b两点为挂线点在地面上的投影,其平面线路坐标采用gnss直接测量获得,高程用全站仪或经纬仪测量获得,任意两点之间的距离通过线路坐标反算得到;c1、c2…cn为在z点能够看到的导线上的点;
25、对于导线上任意一点c1,测量推导其导线坐标的过程如下:
26、根据正弦定理,对于δbzc1和δazc1有:
27、
28、根据以上求解得到c1点的x坐标:
29、
30、c1到架站点z的平面距离s:
31、
32、其中角度α、β直接由全站仪或经纬仪测得;根据余弦定理,sina、sinb的计算公式如下,式中sbz、saz长度直接通过gnss测量的线路坐标反算得到:
33、
34、由架站点z的高程hz、仪器高i及线zc1的垂直角v计算得到c1点的高程:
35、yc=hz+i+s·tan(v) (6)
36、通过以上分析,利用全站仪或经纬仪,测量导线点水平角和垂直角可计算得到c1的导线坐标(x1,y1);
37、同理得到c2…cn的导线坐标(x2,y2)…(xn,yn)。
38、本发明技术方案的进一步改进在于:所述步骤s4的具体操作为:
39、步骤s41,斜抛物线方程初始参数值的计算:
40、公式(2)中只有三个未知数,因此,需要挂线点a、b之间的任意三个点的导线坐标(x1,y1),(x2,y2),(x3,y3),其中,上述点中包括a、b两点,计算得到公式(2)的初始参数值k0、lob0、hb0;
41、步骤s42,斜抛物线方程参数平差迭代计算:
42、根据斜抛物线方程,得如下误差方程:
43、vi=yi-k(xi2-2xilob)-hb (7)
44、线性化:
45、vi=yi-k0(xi2-2xilob0)-hb0-(xi2-2xilob0)δk+2k0xiδlob-δhb
46、得到误差公式:
47、v=bx-l (8)
48、其中:
49、
50、按照最小二乘原理vtv=min,依据间接平差方法,使用最小二乘平差解算
51、x=(btb)-1btl
52、经过多次迭代,每次迭代过程中,使
53、
54、当δk、δlob、δhb小于某一指定的较小值时,迭代结束;
55、将解算的结果带入公式(2)即得到迭代后导线斜抛物线方程;
56、步骤s43,计算单位权中误差:
57、通过步骤s42的计算过程求得
58、单位权中误差
59、其中,n为观测点的总数;
60、判断单位权中误差σ是否满足要求;若满足要求则迭代后导线斜抛物线方程即为满足精度要求的导线斜抛物线方程;若不满足要求则重新返回步骤s3,补充测量导线上的点,重复解算,直至单位权中误差σ满足要求。
61、本发明技术方案的进一步改进在于:当设计线路与已建线路存在交叉跨越点,需要计算交叉跨越点的高程值y,根据步骤s5需要获取跨越点到挂线点b的距离x,则x的计算过程如下:
62、①获取悬挂点a、b的线路平面坐标,获取方法同步骤s3;
63、②根据平面几何的方法计算两条线路交叉点,然后根据坐标,反算交叉点到b点的距离x,代入步骤s4中满足精度要求的导线斜抛物线方程即可得到交叉跨越点的高程值y。
64、本发明技术方案的进一步改进在于:根据所需要高程值来计算跨越点或钻越点范围的过程如下:
65、由于塔型或者地理位置的限制,设计线路在跨越或钻越线路时需要达到某一高程值,需要确定跨越或钻越的位置值范围;由步骤s4中满足精度要求的导线斜抛物线方程可知,此时y确定,解算二次方程y=k(x2-2xlob)+hb,确定相应的x值,此时有2个解,去掉x<lmin和x>l-lmin的解,其中,lmin是设计线路要求到杆塔的最小距离;由y的范围确定跨越点或钻越点在导线上的位置范围,从而为优化设计提供方便;
66、由导线坐标(x,y)计算线路坐标的方法:
67、
68、
69、式中x、y为跨越或钻越点线路坐标;xa、ya为悬挂点a的线路坐标;xb、yb为悬挂点b的线路坐标;其它参数的意义同前。
70、本发明技术方案的进一步改进在于:如果通过方程解算的x值都在x<lmin或x>l-lmin的范围内,那么就需要调整设计方案,即更换塔型或者调节设计线路的杆塔位置或者改变跨越或钻越方案。
71、由于采用了上述技术方案,本发明取得的技术进步是:
72、本发明是在导线斜抛物线方程的基础上,首次进行了有测量意义的平移,使方程参数具有测量意义,便于测量数据采集;进行误差方程的推导、迭代平差计算与精度评定;同时设计多种外业采集与导线坐标的获取方案。
73、本发明方案完备,便于针对不同设备选择不同的数据采集方案。
74、本发明采用多次迭代的平差方法,保证数据质量与精度。
75、本发明拟合整条斜抛物线方程,导线上任意点的高程都可以计算出来,解决导线交叉跨越点不容易测量的问题;
76、本发明一次测量多次可用,解决设计方案微调导致现场测量返工的问题。
77、本发明根据任意点的高程值或者给定高程值,可以确定跨越点或钻越点位置范围,辅助优化设计方案。
78、本发明在测量时如记录当时的工况,可计算在不同工况下导线任意点高程。
79、本发明作业流程完备,便于编程实现,利用本方案已完成悬链线处理系统。
- 还没有人留言评论。精彩留言会获得点赞!