一种空间目标RCS周期提取方法与流程
本发明涉及于数据处理领域。更具体地,涉及一种空间目标rcs周期提取方法。
背景技术:
1、随着空间技术的迅速发展,世界各国对空间资源的重视正日益增加,如何有效对空间目标(卫星、碎片等)进行监视、识别和编目对维护国家安全和促进人类的航天活动都具有重要意义。对空间目标的地面观测手段主要有地基雷达和自适应光学望远镜等。地基雷达获取的空间目标特性数据主要是雷达反射截面积(radar cross section,rcs)数据,反映目标电磁波反射能量,单位是m2或者dbsm。一般而言,目标相对雷达的运动包含了目标以雷达为轴心而旋转的旋转分量,因此目标的rcs时间序列可以粗略地等效为目标在某一角度范围内rcs随角度变化rcs序列。对于自旋卫星而言,由于目标运动的调制作用,使得其动态rcs具有周期性的特点,可以直接对rcs序列进行周期性判定和提取,从而实现对自旋卫星的判定。
2、实测空间目标的rcs序列受目标形状、姿态和雷达性能参数等因素影响,翻滚目标的rcs序列呈现出多起伏、非平稳特性,翻滚周期自动估计通常比较困难,通常利用人工经验来判别目标的翻滚周期。提取rcs序列周期最直接、简单的方法是对原序列作谱窗估计,但对谱密度进行谱窗估计时,截断点和谱窗窗形的选择对谱峰的大小与位置有明显影响。此外,序列的周期会导致周期图在相应的频率处出现峰值,但周期图上的峰值是否真正是隐含周期对应的频率,还需进一步判定。因为甚至对于不含任何周期分量的信号,也会因随机采样引起的周期图波动而出现虚假峰值。
技术实现思路
1、本发明的目的在于提供一种空间目标rcs周期提取方法,以解决现有技术存在的问题中的至少一个。
2、为达到上述目的,本发明采用下述技术方案:
3、本发明第一方面提供一种空间目标rcs周期提取方法,包括:
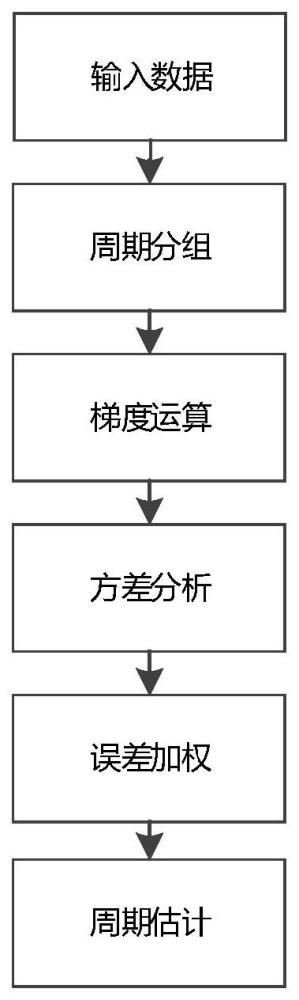
4、s1根据预设周期数值对获取的rcs序列进行分组;
5、s2将分组后的rcs序列转置为矩阵后进行梯度运算,得到行梯度矩阵和列梯度矩阵;
6、s3根据行梯度矩阵和列梯度矩阵计算预设周期数值对应的梯度矢量,并分别提取幅度信息和角度信息;
7、s4分别对幅度信息和角度信息进行方差运算,采用相乘加权的方式计算预设周期数值的rcs序列的误差;
8、s5对预设周期范围中的每个周期数值进行遍历取值,重复s1-s4得到所每个周期数值的rcs序列的误差,根据误差的最小值及次小值对应的周期数值和,计算得到的rcs序列的周期估计值。
9、可选地,判断rcs序列是否整除预设周期数值,判断公式为
10、l=(2≤l<[n/2])
11、其中,x={x1,x2,...,xn}为rcs序列,l为预设周期数值,n为正整数。
12、可选地,若rcs序列不能整除预设周期数值,将rcs序列进行周期延拓,分组个数为ceil(n/l)。
13、其中,ceil()表示向上取整操作,当ceil(n/l)*l>n时,xk=xmod(k,n),其中k=1,2,...,l*ceil(n/l),mod(k,n)表示对k进行模为n的取余操作。
14、可选地,可选地,所述将分组后的rcs序列转置为矩阵后进行梯度运算,得到行梯度矩阵和列梯度矩阵包括
15、将分组后的数据转置为l行ceil(n/l)列的矩阵,每一列代表周期为l的一组数据;
16、对矩阵进行梯度运算,得到l行ceil(n/l)列的行梯度矩阵和列梯度矩阵。
17、可选地,所述的根据行梯度矩阵和列梯度矩阵计算预设周期数值对应的梯度矢量包括
18、对行梯度矩阵和列梯度矩阵分别进行列求和,计算预设周期数值时各分组数据的梯度矢量
19、可选地,所述对行梯度矩阵和列梯度矩阵分别求和得到
20、
21、
22、所述预设周期数值时各分组数据的梯度矢量为g(j),其实部为sx(j);虚部为sy(j);
23、其中,fx为行梯度矩阵,fy为列梯度矩阵,i=1,2,...,l,j=1,2,...,ceil(n/l)。可选地,所述幅度信息和角度信息计算公式分别为
24、errval(j)=abs(g(j))
25、
26、其中,其中,errval(j)为幅度信息,errang(j)为角度信息,j=1,2,...,ceil(n/l)。
27、可选地,所述分别对幅度信息和角度信息进行方差运算,采用相乘加权的方式计算预设周期数值的rcs序列的误差包括
28、计算预设周期数值时各分组数据梯度幅度的方差和角度方差公式为
29、var1=var(errval)
30、var2=var(errang)
31、可选地,所述采用相乘加权的方式计算预设周期数值的rcs序列的误差的计算公式为
32、var(l)=var1(l)×var2(l)(2≤l<[n/2])。
33、可选地,对预设周期范围中的每个周期数值进行遍历取值,重复s1-s4得到所每个周期数值的rcs序列的误差,根据误差的最小值及次小值对应的周期数值和,计算得到的rcs序列的周期估计值包括
34、对l(2≤l<[n/2])进行遍历取值,重复s1-s4,得到所有周期的周期数据误差数组var;
35、找到周期数据误差数组var的最小值及次小值对应的周期数值l1和l2,对两个周期数值相减取绝对值,得到的rcs序列的周期估计值
36、t=|l1-l2|/fs
37、其中,fs为rcs序列的采样频率。
38、本发明的有益效果如下:
39、为本文提出的空间目标rcs周期判定与提取方法,具有方法简洁、精度较高、易于工程实现且无需额外辅助信息等特点,对没有更多先验信息的非合作目标运动状态估计方面时具有显著优势。此外,对于基于光度的空间目标运动状态估计和,由于信号特点与rcs类似,该方法也同样适用。该方法不但能大大提高周期估计的精度,还能缩短对数据长度的要求,而且具有良好的抗噪性能。
技术特征:
1.一种空间目标rcs周期提取方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,
3.根据权利要求2所述的方法,其特征在于,
4.根据权利要求3所述的方法,其特征在于,所述将分组后的rcs序列转置为矩阵后进行梯度运算,得到行梯度矩阵和列梯度矩阵包括
5.根据权利要求4所述的方法,其特征在于,
6.根据权利要求5所述的方法,其特征在于,所述对行梯度矩阵和列梯度矩阵分别求和得到
7.根据权利要求6所述的方法,其特征在于,所述幅度信息和角度信息计算公式分别为
8.根据权利要求7所述的方法,其特征在于,所述分别对幅度信息和角度信息进行方差运算,采用相乘加权的方式计算预设周期数值的rcs序列的误差包括
9.根据权利要求8所述的方法,其特征在于,所述采用相乘加权的方式计算预设周期数值的rcs序列的误差的计算公式为
10.根据权利要求9所述的方法,其特征在于,对预设周期范围中的每个周期数值进行遍历取值,重复s1-s4得到所每个周期数值的rcs序列的误差,根据误差的最小值及次小值对应的周期数值和,计算得到的rcs序列的周期估计值包括
技术总结
本发明实施例公开一种空间目标RCS周期提取方法。在一具体实施方式中,该方法包括:S1根据预设周期数值对获取的RCS序列进行分组;S2将分组后的RCS序列转置为矩阵后进行梯度运算,得到行梯度矩阵和列梯度矩阵;S3根据行梯度矩阵和列梯度矩阵计算预设周期数值对应的梯度矢量,并分别提取幅度信息和角度信息;S4分别对幅度信息和角度信息进行方差运算,采用相乘加权的方式计算预设周期数值的RCS序列的误差;S5对预设周期范围中的每个周期数值进行遍历取值,重复S1‑S4得到所每个周期数值的RCS序列的误差,根据误差的最小值及次小值对应的周期数值和,计算得到的RCS序列的周期估计值。
技术研发人员:侯敏,刘美琪
受保护的技术使用者:北京无线电测量研究所
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!