星心恒星视位置高精度计算方法及电子设备和计算机可读存储介质与流程
本发明涉及卫星姿态控制,尤其涉及一种星心恒星视位置高精度计算方法及电子设备和计算机可读存储介质。
背景技术:
1、根据质量对卫星进行分类,通常将10-100kg的卫星成为微卫星。随着微电子技术和微机械技术的快速发展,微卫星逐渐展示出质量轻、体积小、成本低、研发周期短、发射方式灵活、生存能力强、风险小等特点,这些优越性能使其在商业、军事和空间科学上都具有十分巨大的应用潜力。微卫星定姿技术是指在微小卫星的运行过程中,通过对卫星内部传感器采集的数据进行处理,实现对卫星姿态的精确测量和控制。伴随着卫星应用的不断深入,复杂的应用场景对该项技术提出了更高的要求,如姿态确定与控制系统除了要简单、可靠、易实现、寿命长、成本低、易维护外,还需要实现高精度,具体来讲,对天文定姿的需求已达到亚角秒级甚至更高。
2、高精度星心(基于卫星上光学敏感器进行定姿)恒星视位置计算是实现高精度天文定姿的基础。目前很多恒星视位置计算方法是用于地基和海基上的,而星心恒星视位置计算时光学敏感器位于在轨高速运动的卫星上,与地基海基的运用情况最大的差别就是卫星运动引起的光行差量级较大,不可忽略。另外,也有基于运动平台的恒星视位置计算方法,但计算精度还有待提高。
技术实现思路
1、为解决上述现有技术中存在的技术问题,本发明的目的在于提供一种的星心恒星视位置高精度计算方法,满足卫星高精度天文定姿的要求。
2、为实现上述发明目的,本发明提供了一种星心恒星视位置高精度计算方法,包括以下步骤:
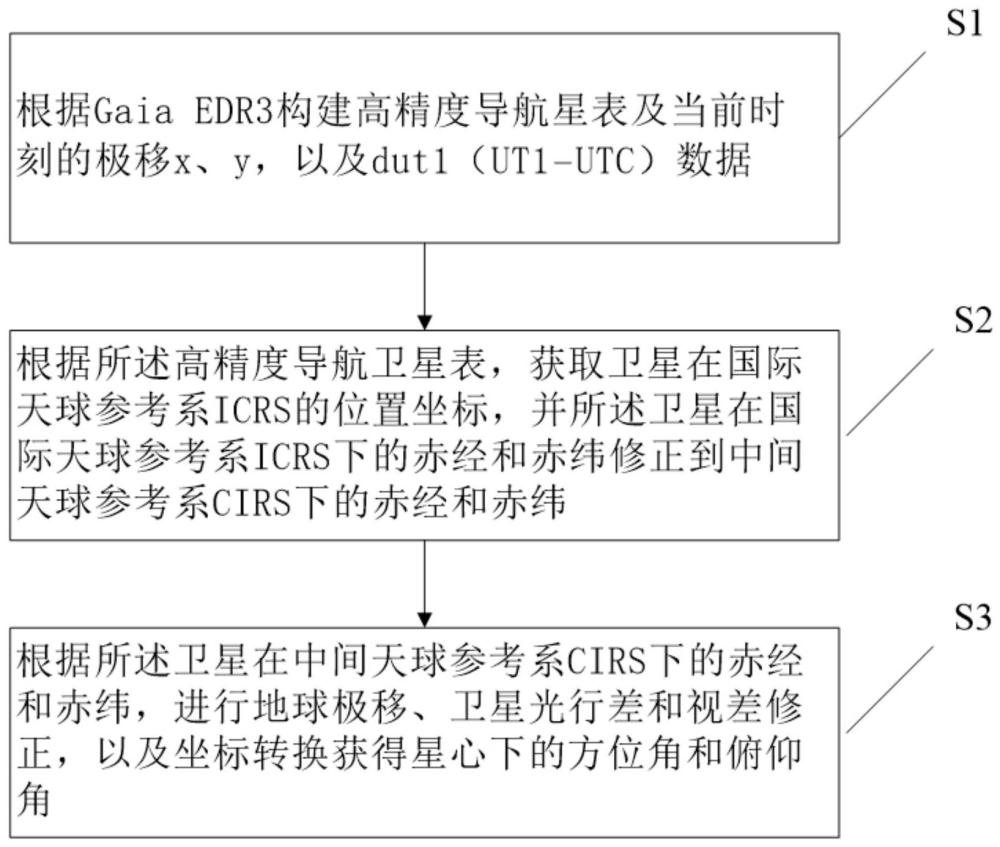
3、步骤s1、根据gaia edr3构建高精度导航星表及当前时刻的极移x、y,以及dut1(ut1-utc)数据;
4、步骤s2、获取卫星在国际天球参考系icrs的位置坐标,并所述卫星在国际天球参考系icrs下的赤经和赤纬修正到中间天球参考系cirs下的赤经和赤纬;
5、步骤s3、根据所述卫星在中间天球参考系cirs下的赤经和赤纬,进行地球极移、卫星光行差和视差修正以及坐标转换,获得星心下的方位角和俯仰角。
6、根据本发明的一个技术方案,在所述步骤s1中,具体包括:
7、步骤s21、根据高精度导航星表获取所述卫星在国际天球参考系icrs的位置坐标,根据所述卫星在国际天球参考系icrs的位置坐标,进行恒星自行修正,获得所述卫星的质心天球参考系bcrs位置坐标;
8、步骤s22、根据所述卫星的质心天球参考系bcrs位置坐标,进行视差修正,获得所述卫星的天体测量位置坐标;
9、步骤s23、根据所述卫星的天体测量位置坐标,进行光线弯曲改正和光行差修正,获得所述卫星的地心天球参考系gcrs位置坐标;
10、步骤s24、根据所述卫星的地心天球参考系gcrs位置坐标,进行基于无旋转原点的岁差-章动修正,获得所述卫星的中间天球参考系cirs位置坐标。
11、根据本发明的一个技术方案,所述卫星在国际天球参考系icrs的位置坐标包括αicrs、δcirs、dαicrs、dδicrs、πicrs、dricrs;
12、所述卫星的质心天球参考系bcrs位置坐标包括αbcrs、δbcrs、rbcrs;
13、所述卫星的天体测量位置坐标包括αm、δm;
14、所述卫星的地心天球参考系gcrs位置坐标包括αgcrs、δgcrs;
15、所述卫星的中间天球参考系cirs位置坐标包括αcirs、δcirs。
16、根据本发明的一个技术方案,在所述步骤s2中,具体包括:
17、步骤s31、根据所述卫星的中间天球参考系cirs位置坐标,进行地球自转角修正,获得所述卫星的中间地球参考系tirs位置坐标;
18、步骤s32、根据所述卫星的中间地球参考系tirs位置坐标,进行极移修正,获得所述卫星的国际地球参考系itrs位置坐标;
19、步骤s33、根据所述卫星的国际地球参考系itrs位置坐标,进行光卫星经度修正,获得所述卫星的卫星位置视位置;
20、步骤s34、根据所述卫星的卫星位置视位置,设置大气折射影响为0,进行卫星光行差修正和视差修正,获得所述卫星的星心时角坐标;
21、步骤s35、根据所述卫星的星心时角坐标,进行卫星纬度修正,获得所述卫星的星心观测方位俯仰坐标。
22、根据本发明的一个技术方案,在所述步骤s2中,具体包括:
23、所述卫星的中间地球参考系tirs位置坐标包括λtirs、
24、所述卫星的国际地球参考系itrs位置坐标包括λitrs、
25、所述卫星的卫星位置视位置包括λ、
26、所述卫星的星心时角坐标包括h、δ;
27、所述卫星的星心观测方位俯仰坐标包括az、ei。
28、根据本发明的一个技术方案,所述gaia edr3导航星表包括导航恒星的历元、赤经、赤纬、赤经方向自行、赤纬方向自行、视差和径向速度,所述导航恒星的历元、赤经、赤纬、赤经方向自行、赤纬方向自行、视差通过从gaia edr3数据中提取获得,所述径向速度通过gaia数据版本2中提取获得。
29、根据本发明的一个技术方案,所述当前时刻的极移x、y以及dut1(ut1-utc)数据,通过差值法从iers公告中获得。
30、根据本发明的一个方面,提供了一种电子设备,包括:一个或多个处理器、一个或多个存储器、以及一个或多个计算机程序;其中,处理器与存储器连接,上述一个或多个计算机程序被存储在存储器中,当电子设备运行时,该处理器执行该存储器存储的一个或多个计算机程序,以使电子设备执行上述的星心恒星视位置高精度计算方法。
31、根据本发明的一个方面,提供了一种计算机可读存储介质,用于存储计算机指令,所述计算机指令被处理器执行时,实现上述的星心恒星视位置高精度计算方法。
32、本发明与现有技术相比,具有如下有益效果:
33、本发明提出了一种星心恒星视位置高精度计算方法、电子设备及存储介质,基于到目前为止所获得的最高精度的银河系3d数据gaia edr3构建了高精度导航星表,对卫星运动引起的光行差进行修正,实现了精度高于其他基于运动平台的恒星视位置计算方法,精度达到毫角秒量级。因此,本发明提供的星心恒星视位置高精度计算方法,满足卫星亚角秒甚至更高精度天文定姿的要求。
技术特征:
1.一种星心恒星视位置高精度计算方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的星心恒星视位置高精度计算方法,其特征在于,在所述步骤s1中,具体包括:
3.根据权利要求2所述的星心恒星视位置高精度计算方法,其特征在于,所述卫星在国际天球参考系icrs的位置坐标包括αicrs、δcirs、dαicrs、dδicrs、πicrs、dricrs;
4.根据权利要求3所述的星心恒星视位置高精度计算方法,其特征在于,在所述步骤s2中,具体包括:
5.根据权利要求4所述的星心恒星视位置高精度计算方法,其特征在于,在所述步骤s2中,具体包括:
6.根据权利要求1所述的星心恒星视位置高精度计算方法,其特征在于,所述gaiaedr3导航星表包括导航恒星的历元、赤经、赤纬、赤经方向自行、赤纬方向自行、视差和径向速度,所述导航恒星的历元、赤经、赤纬、赤经方向自行、赤纬方向自行、视差通过从gaiaedr3数据中提取获得,所述径向速度通过gaia数据版本2中提取获得。
7.根据权利要求6所述的星心恒星视位置高精度计算方法,其特征在于,所述当前时刻的极移x、y以及dut1(ut1-utc)数据,通过差值法从iers公告中获得。
8.一种电子设备,其特征在于,包括:一个或多个处理器、一个或多个存储器、以及一个或多个计算机程序;其中,处理器与存储器连接,上述一个或多个计算机程序被存储在存储器中,当电子设备运行时,该处理器执行该存储器存储的一个或多个计算机程序,以使电子设备执行如权利要求1至7中任一项所述的星心恒星视位置高精度计算方法。
9.一种计算机可读存储介质,其特征在于,用于存储计算机指令,所述计算机指令被处理器执行时,实现如权利要求1至7中任一项所述的星心恒星视位置高精度计算方法。
技术总结
本发明涉及一种星心恒星视位置高精度计算方法、电子设备及存储介质,该方法包括以下步骤:步骤S1、根据Gaia EDR3构建高精度导航星表及当前时刻的极移x、y,以及dut1(UT1‑UTC)数据;步骤S2、获取卫星在国际天球参考系ICRS的位置坐标,并所述卫星在国际天球参考系ICRS下的赤经和赤纬修正到中间天球参考系CIRS下的赤经和赤纬;步骤S3、根据所述卫星在中间天球参考系CIRS下的赤经和赤纬,进行地球极移、卫星光行差和视差修正,以及坐标转换获得星心下的方位角和俯仰角。本发明基于削弱解算策略差异引起的钟差产品系统误差对综合钟差的影响,提高基于Gaia EDR3构建高精度导航星表,并对卫星运动引起的光行差进行了修正,提高了星心恒星视位置计算的精度。
技术研发人员:林亲,姚伟
受保护的技术使用者:中国空间技术研究院
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!