一种基于DBN-SVDD-TCN的工业机器人关节寿命预测方法
本发明涉及机电设备状态监测与故障诊断,具体为一种基于dbn-svdd-tcn的工业机器人关节寿命预测方法。
背景技术:
1、随着“智能制造”和高质量发展战略的提出,自动化、智能化被应用于制造业的各个领域。以工业机器人为核心的自动化生产设备得到迅速发展。现代机械工业领域中,工业机器人能够代替人工在环境恶劣、工作内容单一的作业场景下完成难度系数大、危险系数高的任务。但工业机器人的精度退化和故障问题较为突出,且故障发生部位多为机器人关节,目前很多学者仅对机器人关节故障诊断算法进行了研究,却因机器人工况复杂性与其疲劳试验周期过长等原因而导致对其寿命预测缺少深入和具体的研究。
2、rv减速器作为工业机器人关节的关键零部件,对工业机器人的运行状态有着重要的影响。剩余使用寿命预测(remaining useful life,rul)是故障预测和健康管理(phm)中一个具有重要意义的研究课题。开展基于rv减速器的rul预测,是实现工业机器人“预测性维护”,减少维护成本的必要前提。rv减速器rul预测主要包括rv减速器退化特征提取、健康预测模型建立这两个关键步骤。针对rv减速机在长期工作中因环境干扰、关键状态信息被淹没而具有强冗余性、退化起始点非稳定定位等因素,导致其剩余使用寿命难以准确预测的问题,提出一种基于dbn-svdd-tcn的工业机器人关节寿命预测方法。
技术实现思路
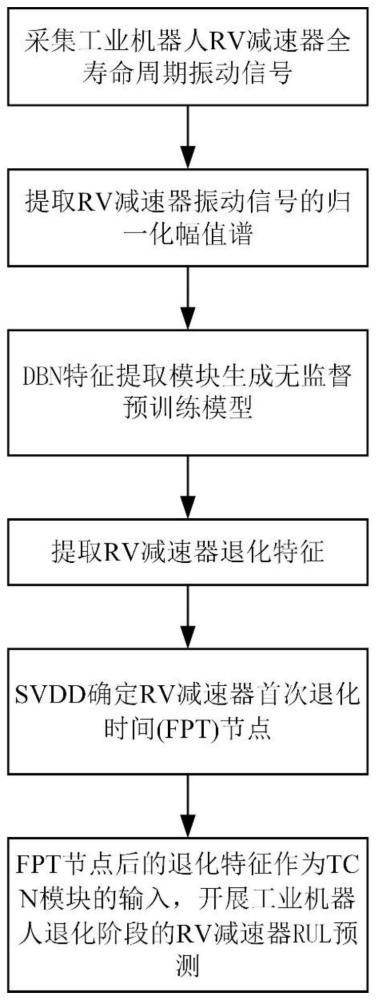
1、为实现以上目的,本发明通过以下技术方案予以实现:一种基于dbn-svdd-tcn的工业机器人关节寿命预测方法,该方法包括以下步骤:
2、s1、采集工业机器人的rv减速器全寿命周期振动信号,进行降噪处理,并提取单一样本的幅值谱;
3、s2、搭建dbn特征提取模块,将降噪后的rv减速器健康阶段的单一样本幅值谱作为训练样本,通过贪婪学习对dbn模型进行预训练;
4、s3、基于s2,将rv减速器全寿命周期的单一样本幅值谱作为dbn模型的输入,以dbn网络隐藏层节点的激活概率构建关节退化特征;
5、s4、搭建多核svdd模型,将s3中的退化特征作为多核svdd模型的输入,定位rv减速器fpt节点;
6、s5、将s4中fpt节点后的退化特征赋予退化标签,并作为tcn模型的输入,对rv减速器rul进行预测。
7、优选的,所述s3具体包括:以dbn隐藏层节点的激活概率p构建退化指标,其输出是隐藏层节点的激活概率为1,判定是属于训练数据分布的测试数据的概率p表达式为:
8、
9、其中,p(hx=1|v)表示隐藏层节点为1的激活概率,σ表示激活函数,wix表示当输入样本为hx时的第i神经元的连接权重,bx表示可见层和隐藏层的偏置项。
10、优选的,所述s4具体包括,通过多核svdd对rv减速器的fpt节点进行定位,svdd模型使用超球体的超球面作为其决策面,将健康样本和非健康样本区分开,且健康样本位于球内,非健康样本位于球外,经由超球面半径确定rv减速器的fpt节点,超球面的半径r的计算公式为:
11、
12、其中,α为拉格朗日乘子,xi为已标记样本,k(xi·xi)表示核函数。
13、优选的,所述s4具体还包括,将rv减速器的整周期的关节退化特征输入已训练完成svdd模型中,并根据计算公式计算测试样本与超球体球心的距离d,其中测试样本yn到超球体球心的距离d的计算公式为:
14、
15、当d≤r时,测试样本位于超球体内,表明关节处于健康阶段;
16、当d>r时,说明rv减速器出现性能退化,值越大表明rv减速器的退化程度越严重。
17、优选的,所述s4具体还包括,通过引入多核函数,提高svdd模型的局部学习能力与泛化能力,以保证rv减速器fpt的定位精度。
18、优选的,所述s5具体包括:将rv减速器退化数据所提取的fpt节点后的退化特征赋予退化标签,标签表示当前rv减速器的rul,采用剩余寿命使用百分比作为预测标签,且计算准则为:
19、
20、其中,lm表示rv减速器的剩余寿命使用百分比,dlen表示退化数据的总长度,m表示当退化起始点到当前时刻的退化样本长度;
21、之后搭建预测模型,引入tcn搭建寿命预测模型,实现对rv减速器的rul的精准预测。
22、优选的,所述s5具体还包括:扩展因果卷积,为tcn模型的核心模块,能够捕捉长距离的信息,用于解决网络过深导致梯度消失、爆炸、模型预测精度低的问题,扩展因果卷积的感受野计算公式如下:
23、
24、其中,k为卷积核的大小,n为卷积层数,b为扩展系数的底数
25、本发明提供了一种基于dbn-svdd-tcn的工业机器人关节寿命预测方法。
26、具备以下有益效果:
27、1、本发明的目的是对rv减速器的rul进行预测,提供了一种考虑深度学习在rv减速器退化数据应用中存在的干扰大、序列过长导致的记忆衰退,退化特征缺乏明确物理意义的rv减速器rul预测方法。从而为rv减速器的寿命及可靠性提供参考,为工业机器人的智能维护提供理论支持。
28、2、发明包括三部分,在第一部分中,搭建dbn特征提取模型,并进行预训练,通过已完成训练的dbn模型提取rv减速器退化特征;在第二部分中,搭建了多核svdd模型,通过多核函数优化svdd,对rv减速器fpt节点进行准确定位;在第三部分中,搭建了tcn预测模型,将fpt节点后的工业机器人关节退化特征作为tcn模型的输入,对rv减速器的rul进行预测,并与rnn类模型进行对比,验证了本方法的优势。
技术特征:
1.一种基于dbn-svdd-tcn的工业机器人关节寿命预测方法,其特征在于:该方法包括以下步骤:
2.根据权利要求1所述的一种基于dbn-svdd-tcn的工业机器人关节寿命预测方法,其特征在于:所述s3具体包括:以dbn隐藏层节点的激活概率p构建退化指标,其输出是隐藏层节点的激活概率为1,判定是属于训练数据分布的测试数据的概率p表达式为:
3.根据权利要求1所述的一种基于dbn-svdd-tcn的工业机器人关节寿命预测方法,其特征在于:所述s4具体包括,通过多核svdd对rv减速器的fpt节点进行定位,svdd模型使用超球体的超球面作为其决策面,将健康样本和非健康样本区分开,且健康样本位于球内,非健康样本位于球外,经由超球面半径确定rv减速器的fpt节点,超球面的半径r的计算公式为:
4.根据权利要求3所述的一种基于dbn-svdd-tcn的工业机器人关节寿命预测方法,其特征在于:所述s4具体还包括,将rv减速器的整周期的关节退化特征输入已训练完成svdd模型中,并根据计算公式计算测试样本与超球体球心的距离d,其中测试样本yn到超球体球心的距离d的计算公式为:
5.根据权利要求4所述的一种基于dbn-svdd-tcn的工业机器人关节寿命预测方法,其特征在于:所述s4具体还包括,通过引入多核函数,提高svdd模型的局部学习能力与泛化能力,以保证rv减速器fpt的定位精度。
6.根据权利要求1所述的一种基于dbn-svdd-tcn的工业机器人关节寿命预测方法,其特征在于:所述s5具体包括:将rv减速器退化数据所提取的fpt节点后的退化特征赋予退化标签,标签表示当前rv减速器的rul,采用剩余寿命使用百分比作为预测标签,且计算准则为:
7.根据权利要求6所述的一种基于dbn-svdd-tcn的工业机器人关节寿命预测方法,其特征在于:所述s5具体还包括:扩展因果卷积,为tcn模型的核心模块,能够捕捉长距离的信息,用于解决网络过深导致梯度消失、爆炸、模型预测精度低的问题,扩展因果卷积的感受野计算公式如下:
技术总结
本发明提供一种基于DBN‑SVDD‑TCN的工业机器人关节寿命预测方法,该方法包括以下步骤:S1、采集工业机器人的RV减速器全寿命周期振动信号,进行降噪处理,并提取单一样本的幅值谱;S2、搭建DBN特征提取模块,将降噪后的RV减速器健康阶段的单一样本幅值谱作为训练样本。本发明包括三部分,在第一部分中,搭建DBN特征提取模型,并进行预训练,通过已完成训练的DBN模型提取RV减速器退化特征;在第二部分中,搭建了多核SVDD模型,通过多核函数优化SVDD,对RV减速器FPT节点进行准确定位;在第三部分中,搭建了TCN预测模型,将FPT节点后的工业机器人关节退化特征作为TCN模型的输入,对RV减速器的RUL进行预测,与其他方法相比较,本发明具有更高的RUL预测精度。
技术研发人员:王之海,仁国爱,柳小勤,刘韬,刘畅,宋峰
受保护的技术使用者:昆明理工大学
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!