一种基于DBSCAN聚类算法的边坡雷达监测预警方法与流程
:本发明涉及一种边坡雷达监测预警方法,尤其涉及一种基于dbscan聚类算法的边坡雷达监测预警方法。
背景技术
0、
背景技术:
1、在国内对矿山生产安全愈发重视的新形势下,边坡雷达凭借其远距离大范围监测能力和全天时全天候的微波遥感技术优势,更有利于滑体形变场的识别、判定及趋势预测,已逐渐成为形变灾害监测技术的研究热点和发展方向。
2、目前,国内外均有成熟的边坡雷达系统问世,数据源广泛。但是,现有边坡雷达的预警模型和预警方法存在诸多问题。目前的预警模型大都是根据位移阈值直接筛分测点,不考虑测点的空间关联与位移变化特征,因此其变形区域的圈定误差较大,较易产生小范围或孤立点的监测数值变化作为变形识别单元触发的虚警情况且只能对边坡风险情况做出粗略判断,无法对滑坡阶段、滑坡模式做出有效预测预警。
技术实现思路
0、
技术实现要素:
1、为了解决上述问题,本发明的目的在于提供一种基于dbscan聚类算法的边坡雷达监测预警方法。
2、本发明由如下技术方案实施:
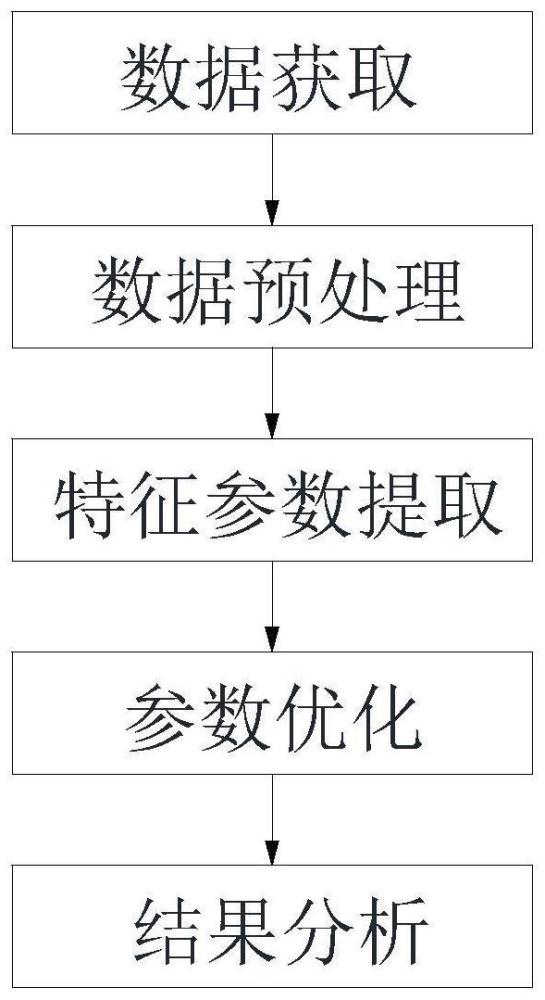
3、一种基于dbscan聚类算法的边坡雷达监测预警方法,包括以下步骤:
4、s1、数据获取:通过设置在边坡上的边坡雷达获取具有空间信息与位移时间序列信息的区域监测数据;
5、s2、数据预处理:对所述s1、数据获取中获取的区域监测数据进行缺失值填充、等时间长度位移量合并、位移时间序列中位移数据的时间属性标准化处理和空间属性归一化处理;
6、s3、特征参数提取:将所述s2、数据预处理中预处理后的数据通过主成分分析法降低数据维度,然后使用k距离法得到较优的邻域半径与最小样本数,作为初始特征参数;
7、s4、参数优化:将所述s3、特征参数提取中得到的两个初始特征参数使用dbscan聚类算法对雷达监测点进行聚类,根据轮廓系数法对聚类参数进行评价,对初始特征参数进行优化,得到优化后的特征参数;利用优化后的特征参数进行聚类,并对聚类参数再次进行评价,通过重复优化特征参数,直至选出当前数据最优的邻域半径与最小样本数,作为最优聚类参数;
8、s5、结果分析:根据所述s4、参数优化中得到的最优聚类参数进行聚类,根据聚类结果划分若干测点簇,对各簇的总累积位移速率均值、面积较大的区域进行标定,给出平均位移时间序列曲线并对边坡的变形所处的阶段、变形区域的破坏规模和模式给出预测结果。
9、进一步的,所述s1、数据获取中,通过差分干涉测量结果与无人机航测点云模型配准,得到从历史某时刻至当前时刻的区域监测数据,每个区域监测点的监测数据包含xi、yi、zi的空间坐标值以及位移时间序列,位移时间序列为由不同监测时刻以及该监测点在不同监测时刻对应的位移数据所组成的数据序列。
10、进一步的,所述s2、数据预处理中,缺失值填充的具体方法为:若区域监测数据存在部分监测点若干时刻缺失位移数据,缺失的位移数据通过追溯前后监测时刻的位移数据进行线性插值填充,若缺失的位移数据为序列的首尾数据,可选择相邻监测时刻的位移数据进行填充;若某个监测点缺失的位移数据占比超过50%,可舍弃该监测点。
11、所述s2、数据预处理中,等时间长度位移量合并的方法为:选取不同时间跨度对同一监测点的位移数据进行累加合并,从而组成最小位移时间序列,选取的时间跨度称为最小周期。
12、进一步的,所述s2、数据预处理中,位移时间序列中位移数据的空间属性归一化处理方法为:
13、将最小位移时间序列的空间坐标值按照式(1)进行归一化处理:
14、
15、其中,xnorm是归一化后的空间数据,z是缩放系数,x为最小位移时间序列中待归一化处理的原始空间数据,xmax、xmin分别是最小位移时间序列中原始空间数据的最大值与最小值;
16、位移时间序列中位移数据的时间属性标准化处理方法为:将最小位移时间序列的位移数据按照式(2)进行标准化预处理:
17、
18、其中,xnew是标准化后的时间位移序列数据,μ、σ分别是最小位移时间序列中原始位移数据的均值和标准差,x为最小位移时间序列中待归一化处理的原始位移数据。
19、进一步的,所述s3、特征参数提取中,通过主成分分析法降低数据维度的方法为:
20、将标准化和归一化处理后的序列数据组成n行m列的矩阵z,其中,n为监测点的个数,m为3+位移时间序列的列数;
21、将矩阵z的每一行进行零均值化,即减去这一行的均值;
22、求出协方差矩阵
23、再求出协方差矩阵c的特征值及对应的特征向量;
24、将特征向量按对应特征值大小从上到下按行排列成矩阵,取前q行组成矩阵p;
25、y=pz即为降维到q维后的监测数据。
26、进一步的,所述s3、特征参数提取中,使用k距离法得到初始特征参数的方法为:选取初始k值,通常为2*q-1,其中q为主成分分析法降维后的维度;
27、初始最小样本数minpts的取值为k+1;
28、计算并绘制k-distance图,该图纵坐标为每个监测点到距其第k近的监测点的距离,横坐标为每个监测点到距其第k近的监测点的点的个数;
29、k-distance图的拐点对应的纵坐标值即为初始邻域半径γ的值。
30、进一步的,所述s4、参数优化中,使用dbscan聚类算法对雷达监测点进行聚类,具体方法为:
31、(1)、读入降维后的监测数据y={p1,p2,…,pn};
32、(2)、计算每个点的邻近点个数,即nγ(pi)={pi∈d∣dis(pi,pj)≤γ},其中γ为检测对象的邻近点距离,也即初始邻域半径,距离可采用欧氏距离,其计算公式为:
33、
34、其中,pik、pjk分别为第i、j个测点第k维度特征数值;
35、(3)、寻找核心点,将符合|nγ(pi)|≥minpts条件的点标记为核心点,其中最小样本数minpts为检测对象邻域内的初始最小样本数;
36、(4)、将间距低于初始邻域半径γ的核心点划分为同一个簇,得到几组不同分类的簇。
37、进一步的,所述s4、参数优化中,根据轮廓系数法判断聚类效果优劣,并对聚类参数进行评价与优化,轮廓系数公式为:
38、
39、其中,u(i)与w(i)分别代表监测数据点pi与当前簇和其他簇的相似度,计算公式如下:
40、
41、
42、其中,n1与n2分别为数据点pi所属当前簇和其他簇的点的个数;
43、以k距离法得到的最小样本数minpts和邻域半径γ作为初始值,以初始值为基准对最小样本数minpts和邻域半径γ进行独立等差增加或减小,形成不同的参数组合,对组合参数分别进行聚类分析并生成轮廓系数矩阵,找到最小轮廓系数。
44、进一步的,所述s5、结果分析包括以下步骤:
45、s51、根据聚类结果,得到根据时空特征划分的若干测点簇,对各簇的总累积位移速率均值大小进行排序并以不同颜色进行标定;
46、s52、通过边坡雷达监测区域总面积与监测点个数估算每个监测点平均覆盖坡表的面积,根据不同簇的监测点个数计算簇所占的边坡面积,根据簇的面积与所述s51得到的累积位移速率均值评估预警等级;
47、s53、计算各簇最近时刻t-t曲线切线角,估判边坡变形所处的阶段并对预警等级进行调整;
48、s54、若边坡处于黄色等级以上预警等级,则筛选位移速率超过黄色等级预警阈值和切线角超过65°的簇,根据簇空间延展的范围与对应边坡的部位推断边坡潜在的破坏规模和模式。
49、进一步的,所述s53具体包括以下步骤:
50、(1)根据聚类结果,计算每个簇、每个最小周期的位移数据均值,得到各簇的平均位移时间序列曲线;
51、(2)依次计算每个簇平均位移时间序列曲线的二阶离散差,得到i簇除首尾最小周期外的位移加速度ai(tj),其计算公式如下:
52、ai(tj)=δsi(tj)-δsi(tj-1) (7)
53、δsi(tj)=[si(tj+1)-si(tj)] (8)
54、其中,si(tj)为i簇最小周期tj及其更早最小周期的总累积位移,δsi(tj)为i簇相邻两个最小周期的位移变化量,即以最小周期时间长度t为单位时间的位移速度,故ai(tj)为i簇以最小周期tj为单位时间的位移加速度;
55、(3)取最小周期时段内边坡变形速率由0发展至黄色等级预警速率阈值的加速度为加速度阈值at,其计算公式为:
56、
57、其中,vy为黄色等级预警速率阈值,单位为mm/天,t为最小周期时间长度,单位为小时;
58、(4)对每个簇进行匀速阶段位移速率计算,根据加速度阈值at截取某簇若干不连续的近零加速度对应的时段,这些时段对应该簇平均位移时间序列曲线的类匀速运动阶段,计算其中i簇类匀速运动最长时段的位移速率其计算公式为:
59、
60、其中,tj+n和tj分别为类匀速运动最长时段的初始和末尾最小周期;
61、(5)为了解决位移时间序列曲线横纵坐标量纲不统一的问题,定义纵坐标变换值ti(tj):
62、
63、其中ti(tj)为i簇最小周期tj变换后与时间相同量纲的纵坐标值;
64、(6)根据计算得到的ti(tj),可以得到曲线切线角αi:
65、αi=arctanδti(tj) (12)
66、δti(tj)=ti(tj)-ti(tj-1) (13)
67、通过计算各簇最大的曲线切线角,判断边坡所处的变形阶段,若存在多个簇的最大曲线切线角均位于曲线末端且值大于65°,边坡存在进入加速变形的可能,此时应将边坡所处的预警等级上调一级,红色预警则不调整等级。
68、进一步的,所述s54具体包括以下步骤:
69、(1)筛选的簇覆盖的边坡最上部位置可推测为边坡破坏的后缘,过其所属台阶坡肩处以边坡角为倾角绘制平面,后缘距该平面的距离可近似为边坡破坏厚度,结合筛选簇所覆盖的面积即可估算边坡的破坏规模;
70、(2)筛选的簇集中在坡脚处常代表滑移、流动、溃曲破坏,集中于坡肩处则常代表崩塌、倾倒等破坏(规模一般较小),簇呈现“v”型常代表楔形破坏。
71、本发明的优点:
72、本发明依据边坡雷达获取的具有空间信息与位移时间序列信息的区域监测数据,基于dbscan聚类算法从时间和空间两个维度综合分析,给出边坡监测预警结果,充分发挥了坡表雷达遥测数据的时空连续性优势;通过对边坡雷达监测数据的聚类挖掘,根据空间属性更为精确的圈定不同类别的边坡变形区域,根据位移变形特征判断边坡变形所处的阶段,结合矿山地质情况对破坏模式进行推断,避免了以小范围或孤立点监测数值变化作为变形识别单元产生的虚警情况,从而有效的对边坡的变形所处的阶段、变形区域的破坏规模和模式给出更准确的监测预警结果,为矿山安全生产提供支撑。
- 还没有人留言评论。精彩留言会获得点赞!