基于最大回波能量选取后向投影的穿墙雷达成像方法
本发明属于图像处理,具体涉及一种基于最大回波能量选取后向投影的穿墙雷达成像方法。
背景技术:
1、多输入多输出(multipleinputmultipleoutput,mimo)超宽带穿墙雷达凭借着包括强穿透性、主动探测、高分辨率和全天候全天时工作的诸多优点,在非金属介质穿透条件下的目标探测具有巨大优势而备受关注,广泛应用于灾后救援、健康监测和反恐维稳领域,然而,在上述应用场景中,实时检测是先决条件。
2、在目标检测和重构方面,成像技术是最直观和最有效的方法。相比于其他成像算法,包括压缩感知、逆散射层析、边界估计、时间反转镜,后向投影(back projection,bp)成像方法由于原理简单,易于工程实现,不受天线阵列限制,且能精确补偿墙体对信号产生的影响,已成为穿墙雷达中最常用的成像算法之一;bp成像方法通过将成像场景划分成均匀的像素点网格,计算雷达天线与像素点之间距离的时延,并将回波数据投影到成像区域的各个像素点上,最终利用相干累加实现高分辨成像。但是,由于bp成像算法在成像过程中需要对整个探测场景进行遍历搜索,存在大量冗余计算,导致计算复杂度高、成像时间长,并且由于成像区域的多个像素点对应于同一个距离门的回波信号,使得成像主瓣展宽,降低了成像分辨率。
3、针对bp成像算法存在的包括计算复杂度高的问题,国内外学者提出了一些改进的bp成像算法:文献“lei wentai,huang chunlin and suyi,"areal-time back projectionimaging algorithm for impulse surface penetrating radar,"proceedings.2005ieeeinternational geoscience and remote sensing symposium,2005.igarss'05.,seoul,korea(south),2005.”通过将成像区域与扫描区域相适应地扩展,提出了一种实时递归反向投影成像算法,但是没有充分利用子孔径对整个成像区域进行相干叠加,导致成像分辨率有所降低;文献“l.zhou,c.huang and y.su,"a fast back-projection algorithmbased on cross correlation for gpr imaging,"in ieee geoscience and remotesensing letters,vol.9,no.2,pp.228-232,march 2012.”利用事先建立的成像区域-时延表来减少经典bp成像算法中的冗余,但是会造成较大的存储负担以及存在场景适配性问题。
4、文献“c.han,w.tian and h.mei,"mimo radar fast imaging algorithm basedon sub-image combination,"20196th asia-pacific conference on syntheticaperture radar(apsar),xiamen,china,2019.”提出了一种基于子图像相干组合的mimo雷达成像算法,可以实现对mimo雷达数据的快速处理,然而,这个算法采用了多次近似来简化计算,进而会牺牲成像的分辨率;专利“李家强,陈焱博,刘然等.一种快速高斯网格化非均匀fft穿墙成像雷达bp方法[p].江苏省:cn112147608a,2020-12-29.”提出了一种基于高斯网格化非均匀fft的bp成像方法,能够避免重复计算和存储bp成像算法中像素幅值表达式,减少了计算次数和内存需求,但成像精度低于bp成像精度。
5、综上所述,尽管上述的大部分bp成像算法在计算复杂度上有所降低,但同时牺牲了成像精度,同时成像的速度也相对较低。
技术实现思路
1、本发明的目的在于提供一种冗余计算减少、成像速度加快、成像精度提升的基于最大回波能量选取后向投影的穿墙雷达成像方法。
2、本发明提供的这种基于最大回波能量选取后向投影的穿墙雷达成像方法,包括如下步骤:
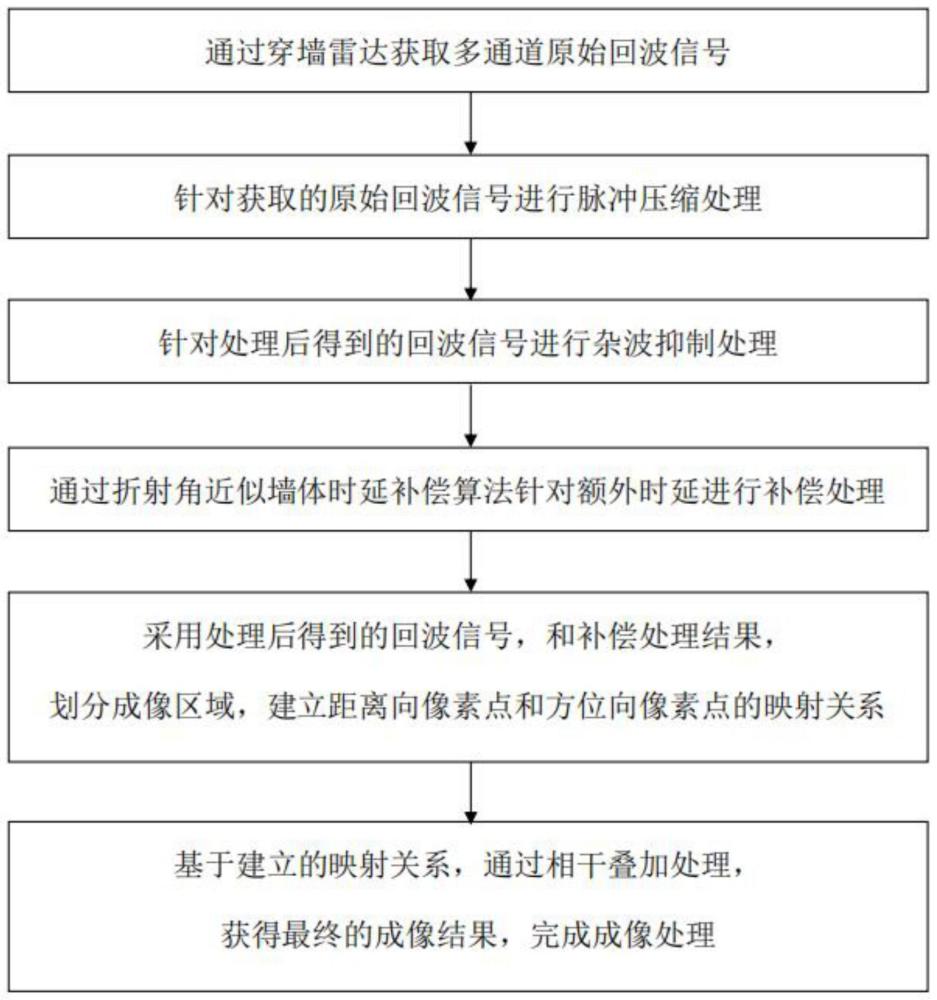
3、s1.通过穿墙雷达获取多通道原始回波信号;
4、s2.针对步骤s1获取的原始回波信号进行脉冲压缩处理;
5、s3.针对步骤s2处理后得到的回波信号进行杂波抑制处理;
6、s4.通过折射角近似墙体时延补偿算法针对额外时延进行补偿处理;
7、s5.采用步骤s3处理后得到的回波信号,和步骤s4补偿处理结果,划分成像区域,建立距离向像素点和方位向像素点的映射关系;
8、s6.基于步骤s5建立的映射关系,通过相干叠加处理,获得最终的成像结果,完成成像处理;
9、步骤s1所述的通过穿墙雷达获取多通道原始回波信号,具体包括:
10、采用下述公式表示时刻t下,具有i个通道的mimo步进频连续波体制雷达的原始回波信号:
11、
12、其中,si(t)表示第i个通道的原始回波信号;表示第i个通道的杂波信号;表示第i个通道的目标信号;noise表示噪声回波;
13、采用下述公式计算
14、
15、其中,表示第i个通道的杂波幅度因子;n表示子脉冲个数;rect(·)表示矩形函数;n表示子脉冲序号;t表示子脉冲持续时间;表示杂波在第i个通道中的双程时延;j表示虚数单位;f0表示起始频率;δf表示频率步进量;
16、采用下述公式计算
17、
18、其中,表示第i个通道的目标幅度因子;表示目标在第i个通道中的双程时延;
19、步骤s2所述的针对步骤s1获取的原始回波信号进行脉冲压缩处理,具体包括:
20、针对步骤s1获取的每个通道的原始回波信号,通过l点快速离散逆傅里叶变换进行脉冲压缩;
21、采用下述公式表示脉冲压缩处理后的第i个通道中第l个距离门的回波数据:
22、
23、其中,gi(l)表示脉冲压缩处理后的第i个通道中第l个距离门的回波数据;
24、步骤s3所述的针对步骤s2处理后得到的回波信号进行杂波抑制处理,具体包括:
25、通过奇异值分解算法,针对步骤s2处理后得到的回波信号进行杂波抑制处理;
26、针对第i个通道获得的k帧雷达数据di进行奇异值分解处理,采用下述公式表示奇异值分解处理过程:
27、
28、其中,表示脉冲压缩后的第i个通道的第k帧的回波数据;u表示l×l阶的正交矩阵;σ表示由奇异值按降序排列的l×k阶的对角矩阵;v表示k×k阶的正交矩阵;ur表示第r个奇异值对应的左特征值向量;r表示di的秩;σr表示第r个奇异值;vr表示第r个奇异值对应的右特征值向量;
29、将前两个奇异值对应的目标信号选择为“杂波”,且外部噪声在回波数据中均匀分布;
30、采用下述公式进一步表示回波数据di:
31、
32、其中,表示杂波矩阵;表示目标矩阵;
33、步骤s5所述的采用步骤s3处理后得到的回波信号,和步骤s4补偿处理结果,划分成像区域,建立距离向像素点和方位向像素点的映射关系,具体包括:
34、设定位于雷达目标回波中第l个距离门的目标p(x,y)到发射天线tx(xtx,0)和接收天线rx(xrx,0)的距离之和为d,d表示路径tx-rt-p-rr-rx的长度,采用下述公式计算d:
35、
36、其中,xtx表示发射天线的方位向位置;xrx表示接收天线的方位向位置;x表示方位向位置;y表示距离向位置;d′表示额外补偿距离,计算公式如下所示:
37、
38、其中,dw表示均匀墙体厚度;εr表示相对介电常数;
39、采用下述公式表示从雷达目标回波中获得的d:
40、
41、其中,c表示光速;l表示快速离散逆傅里叶变换的点数;
42、基于上述计算结果,得到雷达目标回波距离门索引与成像区域像素点的位置关系,如下所示:
43、
44、确定目标所处的距离门索引后,选择x作为自变量、y作为因变量,通过数值分析方法建立距离向位置与方位向位置的映射关系y=f(x),如下所示:
45、
46、其中,y表示距离向位置;x表示方位向位置;
47、步骤s6所述的基于步骤s5建立的映射关系,通过相干叠加处理,获得最终的成像结果,完成成像处理,具体包括:
48、选取目标回波中前m个能量最大值的数据作为目标的散射数据进行相干成像处理;
49、采用下述公式表示最终成像区域内多通道相干叠加成像结果image:
50、
51、其中,i表示第i个通道;i表示通道总数;m表示目标回波中按能量大小排序后的索引;m1表示成像区域内方位向像素点个数;xm1表示方位向上第m1个像素点;fim(xm1)表示在第i个通道中位于第个距离门的目标由方位像素点xm1映射的距离向位置;表示第i个通道的目标回波中能量第m大的回波对应的距离门索引;fc表示中心频率。
52、本发明提供的这种基于最大回波能量选取后向投影的穿墙雷达成像方法,通过对接收的多通道回波信号进行脉冲压缩,获得高分辨率的回波信号;利用杂波抑制算法抑制回波信号中的强杂波干扰,提高回波信噪比;利用折射角近似墙体时延补偿算法补偿额外时延,消除墙体折射的影响,矫正目标位置,实现图像精确聚焦;通过选取能量较大的回波信号作为目标的散射回波,构建距离向-方位向的映射关系,并进行相干成像;本发明方法的冗余计算减少、成像速度加快、成像精度提升。
- 还没有人留言评论。精彩留言会获得点赞!