一种基于囚禁离子的转动角速度传感测量系统和方法
本发明属于量子陀螺仪领域,尤其涉及一种基于penning离子阱的转动传感测量方法。
背景技术:
1、在惯性测量领域,陀螺仪是核心传感器,陀螺仪可以对物体的角运动进行测量从而实现导航、定位等功能。传统陀螺仪中的核心部件是具有一定质量的以极高角速度旋转的转子,该部件具有机械结构的运动特性,因此存在寿命短,精度低,体积大等缺点。随后出现的mems陀螺仪、激光陀螺仪、原子干涉陀螺仪等陀螺仪都存在一定缺点,mems陀螺仪的测量精度低于激光陀螺仪。激光陀螺仪中的代表是光纤陀螺仪,光纤陀螺仪所用的光介质材料会受到环境温度和光辐射吸收的影响发生变化从而影响光的传播,制约了光纤陀螺仪的精度。原子干涉陀螺仪依赖原子系综进行测量,必然会带来一定的系统误差。因此,实现更高精度和可集成的紧凑型高灵敏度陀螺仪,实现更高精度的转动测量,具有重要的理论和应用价值。
技术实现思路
1、本发明提供了一种基于囚禁离子的转动角速度传感测量系统和方法,以更高精度地进行转动测量,并且降低测量转动的装置复杂度。
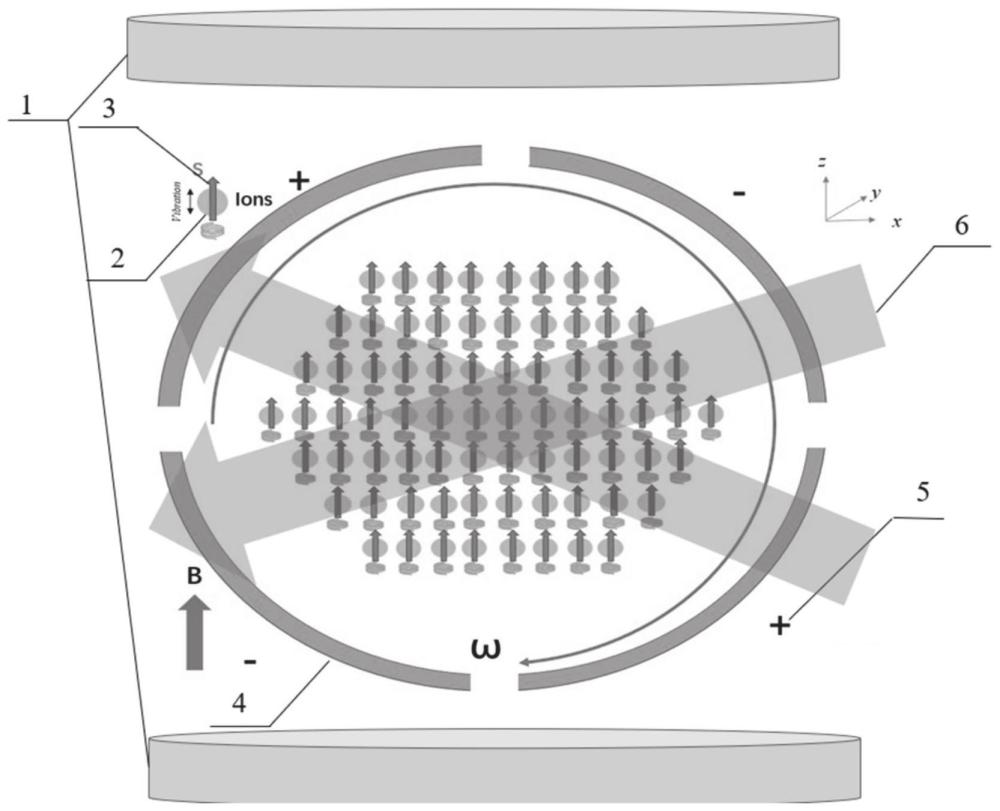
2、为达到上述目的,本发明所述一种基于囚禁离子的转动角速度传感测量系统,包括永磁体、离子阱、离子囚禁电极、恒压电源和偶极力光源;所述永磁体用于产生z方向的磁场,将离子阱中的离子囚禁在xy平面内;所述离子阱包括容器和容器中的离子团,离子团包括若干离子;所述离子团围绕z方向进行旋转质心运动,当外界存在转动角速度输入时,所述离子团和科里奥利力耦合,在z方向产生简谐运动;所述离子囚禁电极包括四个电极,测量时,恒压电源向离子囚禁电极(4)施加交变电压形成旋转电磁场,相对的两个电极所加电压极性相同,相邻两个电极所加电压极性相反;所述偶极力光源用于发出偶极力光束,所述偶极力光束用于纠缠离子的电子自旋和离子的z方向简谐量子机械振子。
3、进一步的,所述离子为ca或be离子。
4、进一步的,所述离子阱为penning离子阱。
5、基于上述的转动角速度传感测量系统的一种基于囚禁离子的转动角速度传感测量方法,包括以下步骤:
6、s1:设置离子阱磁场和陷阱电压,计算离子团运动的轴向频率ωz,控制旋转壁旋转电磁场频率ωw等于离子团的轴向频率ωz,并使离子阱中的离子稳定冷原子囚禁状态;
7、s2:计算离子团的径向约束相对于轴向约束的强度β;
8、s3:通过调整陷阱电压和旋转壁旋转电磁场频率控制离子团的形状,并根据离子团的径向约束相对于轴向约束的强度β计算出离子团的长径比α,将α的值最小时对应的陷阱电压和旋转壁旋转电磁场频率ωw作为最终控制离子团的形状的参数;
9、s4:将传感测量系统固定在转动的被测目标上,使传感测量系统随其一起转动,设被测目标的转动轴线方向为z方向,与z方向垂直的平面设为xy平面,则其在xy平面内转动,根据α、β计算出z=0平面上离子团的半径rcl,此值也是y方向上最外层第i个离子的振幅yi,故平均振幅为整个离子团的y方向振幅yc;
10、s5:根据光偶极力法提供的离子的哈密顿量公式测量出科里奥利力诱导的离子团的轴向振幅zc,根据zc、旋转壁旋转电磁场频率ωw和整个离子团的y方向振幅yc计算得到被测目标的转动角速度ωx,即实现对角速度的测量。
11、进一步的,步骤1中,设置离子阱磁场为1t,陷阱电压在10-100v。
12、进一步的,步骤3中,根据下式计算离子团的长径比α:
13、
14、其中,k1和k0均为中间变量;k0=[1-α2]1/2rcl,rcl为中间变量,
15、计算公式为:
16、
17、其中,a0为中间变量,e为电子的电荷量,∈0为真空介电常数,n为离子阱中的离子数目。
18、进一步的,步骤5中,根据下式计算转动角速度ωx:
19、
20、其中,q为penning阱在z方向谐振子的品质因子。
21、进一步的,步骤s5完成后,根据振幅传感的极限灵敏度公式计算出振幅灵敏度,利用振幅灵敏度和转动测量灵敏度的正比关系得到转动传感测量灵敏度极限。
22、与现有技术相比,本发明至少具有以下有益的技术效果:
23、本发明提出的转动角速度传感测量系统基于penning离子阱的陀螺仪,在转动角速度测量方面具有超高精度,利用多个离子进行测量,离子本身可以作为一个机械振子,具有极高的品质因数,从原理上高品质因数的机械振子系统具有极高的转动角速度测量潜力。因为相比于不带电的中性原子,悬浮在超高真空环境中的离子阱系统更适合量子精密测量的系统,因为可以利用连续的泵浦光和相关荧光探测完美地实现量子态的初始化和探测,并且通过微波、超窄线宽激光或者超稳脉冲激光实现几乎任意量子态演化操作。因此在转动测量精度方面达到了新高度。
24、本发明提出一种基于penning离子阱的转动传感测量方法,通过激光冷却钙离子,利用射频电磁场驱动钙离子团产生振动,并且科里奥利力在正交方向上诱导出的简谐振动与离子团的振动耦合形成量子谐振子,利用光偶极力法(odf)测出诱导振幅和转动灵敏度,成功实现了基于penning离子阱的振幅及旋转传感测量。离子阱是更适合量子精密测量的系统之一,囚禁的离子作为量子态的载体具有很长的相干时间,并且离子阱光路结构相对简单,有利于芯片化。
25、本发明提出的基于离子阱的离子团形状控制方法,能提高离子阱测量转动的灵敏度,因为离子团为扁平的圆形,可以使离子在离子团的轴线方向运动的幅度增强,从而可以增大科里奥利力的耦合强度,从而提高z方向的振动幅度,进而提高测量灵敏度,因此离子团的形状控制方法是重点,离子阱陀螺仪设计提供新的思路,有利于提高陀螺仪的转动传感精度。
技术特征:
1.一种基于囚禁离子的转动角速度传感测量系统,其特征在于,包括永磁体(1)、离子阱、离子囚禁电极(4)、恒压电源和偶极力光源;
2.根据权利要求1所述的一种基于囚禁离子的转动角速度传感测量系统,其特征在于,所述离子为ca或be离子。
3.根据权利要求1所述的一种基于囚禁离子的转动角速度传感测量系统,其特征在于,所述离子阱为penning离子阱。
4.基于权利要求1所述的转动角速度传感测量系统的一种基于囚禁离子的转动角速度传感测量方法,其特征在于,包括以下步骤:
5.根据权利要求4所述的一种基于囚禁离子的转动角速度传感测量方法,其特征在于,所述步骤1中,设置离子阱磁场为1t,陷阱电压在10-100v。
6.根据权利要求4所述的一种基于囚禁离子的转动角速度传感测量方法,其特征在于,所述步骤3中,根据下式计算离子团的长径比α:
7.根据权利要求4所述的一种基于囚禁离子的转动角速度传感测量方法,其特征在于,所述步骤5中,根据下式计算转动角速度ωx:
8.根据权利要求4所述的一种基于囚禁离子的转动角速度传感测量方法,其特征在于,所述步骤s5完成后,根据振幅传感的极限灵敏度公式计算出振幅灵敏度,利用振幅灵敏度和转动测量灵敏度的正比关系得到转动传感测量灵敏度极限。
技术总结
本发明公开了一种基于囚禁离子的转动角速度传感测量系统和方法,所述系统包括永磁体、离子阱、离子囚禁电极、恒压电源和偶极力光源;永磁体用于产生z方向的磁场,用于囚禁离子在xy平面内;离子囚禁电极包括四个电极,测量时,恒压电源向上施加交变电压形成旋转电磁场,相对的两个电极所加电压极性相同,相邻两个电极所加电压极性相反;所述偶极力光源用于发出偶极力光束,所述偶极力光束用于纠缠离子的电子自旋和离子的z方向简谐量子机械振子;所述离子团围绕z方向进行旋转质心运动,当外界存在转动角速度输入时,所述离子团和科里奥利力耦合,在z方向产生简谐运动。在转动测量精度方面达到了新高度。
技术研发人员:陈瑶,赵立波,王纪阳,郭举,秦广照,蒋庄德
受保护的技术使用者:西安交通大学
技术研发日:
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!