一种基于北斗网格码的电力巡检实时防碰撞方法与流程
本发明属于路径规划,尤其是一种基于北斗网格码的电力巡检实时防碰撞的方法。
背景技术:
1、在传统的电力巡检场景中,it系统只会对巡检机器人或巡检无人机的整体巡检路径进行规划,在巡检过程中并不会对巡检机器人或巡检无人机的运行路径进行修正,因此当巡检机器人或巡检无人机在巡检过程中遇到障碍物时,则只能依靠设备本身的避障能力来实现避障,导致了巡检机器人或巡检无人机的安全性以及被巡检的电力设备的安全性都得不到有效的保障。
2、现有技术中,有用于解决单纯依赖雷达防撞预警的车辆在恶劣天气下的碰撞率较高的问题,具体是一种基于数据分析的车辆安全防碰撞预警系统,包括防撞预警平台,所述防撞预警平台通信连接有模式分析模块、雷达监测模块、限速监测模块、预警提醒模块以及存储模块;所述模式分析模块对车辆防撞预警模式进行分析并得到天气系数tq,通过天气系数tq的数值大小将防撞预警模式标记为限速模式或雷达模式;本发明可以对汽车的当前运行环境进行监测分析,从而通过环境监测分析结果对汽车的防撞预警模式进行判定,在不同行车环境下采用不同的防撞预警模式进行安全预警。
3、防撞预警的要素主要为天气、雷达和速率。分析要素单一,没有对空间环境影响进行要素参考分析,如在某个拐弯处存在阻碍物,可能会引起碰撞。现有的判断要素无法进行预判,也无法进行预警。
技术实现思路
1、鉴于上述现有存在的问题,提出了本发明。本发明实现北斗网格位置码下的实时路径防碰撞控制,提高运行安全性。通过实时监测、分析、预警和控制,有效避免在不同场景下因北斗网格位置码差异导致的运行设备之间的碰撞事故,确保运行设备的安全稳定运行。同时,本系统还可以为运行管理人员提供实时、准确的防碰撞控制数据,提高运行效率和管理水平。
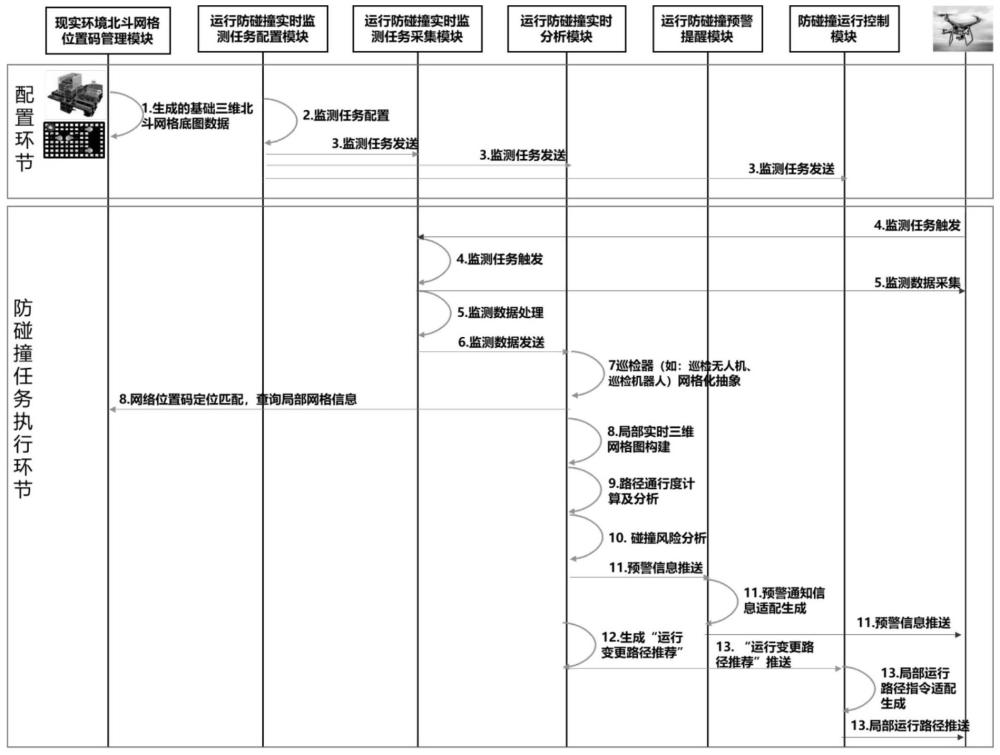
2、为解决上述技术问题,提出了一种基于北斗网格码的电力巡检实时防碰撞方法,包括:现实环境北斗网格位置码管理模块,运行防碰撞实时监测任务配置模块,运行防碰撞实时监测任务采集模块、运行防碰撞实时分析模块、运行防碰撞预警提醒模块和防碰撞运行轨迹控制模块。
3、所述现实环境北斗网格位置码管理模块,进行北斗网格位置码基础数据管理,将现实环境:变电站、输电线路、建筑物、树木、道路实体进行时间空间网格编码,生成“基础三维北斗网格底图”数据,提供给各模块查询调用。
4、所述运行防碰撞实时监测任务配置模块,进行监测任务参数的配置,并将配置好的任务下发给运行防碰撞实时监测任务采集模块,运行防碰撞分析模块。
5、所述运行防碰撞实时监测任务采集模块,根据配置的任务,当触发条件后,进行数据采集处理,并将整理后的数据发送给运行防碰撞分析模块进行防碰撞预测分析。
6、所述运行防碰撞实时分析模块,根据配置的任务,接收运行防碰撞实时监测任务采集模块的采集数据,进行防碰撞分析。
7、所述运行防碰撞预警提醒模块,接收运行防碰撞分析模块转发的预警信息,进行通信格式匹配,并发送给指定的预警对象。
8、所述防碰撞运行轨迹控制模块,接收运行防碰撞分析模块转发“运行变更路径推荐”,进行相应的指令格式匹配,并发送给指定的设备,实现局部环境下的路径优化,避免碰撞的发生。
9、作为本发明所述的基于北斗网格码的电力巡检实时防碰撞系统的一种优选方案,其中:所述运行防碰撞实时分析模块包括局部实时三维网格图构建模块、路径碰撞风险分析模块及风险预警处理模块。
10、所述局部实时三维网格图构建模块包括根据实时采集的数据,结合现实环境北斗网格位置码管理模块提供的“基础三维北斗网格底图”数据,进行北斗网格位置码定位匹配,通过网格码层级的方式,对局部环境进行优化、调整和细化,并识别出网格中的实体类型,生成“局部实时三维网格图”传递给路径碰撞风险分析模块。
11、所述路径碰撞风险分析模块包括结合“局部实时三维网格图”、局部环境中的实体类型,通过空间插值计算法,计算出局部不可通行的网格,并实时分析预测设备在局部环境中移动时,是否与周边网格保持安全距离,是否会发生碰撞,把预测结果传递给风险预警处理模块。
12、所述风险预警处理模块包括当预测结果为会发生碰撞时,根据任务配置的规则,形成预警信息,推送给防碰撞预警提醒模块,并结合“局部实时三维网格图”,生成局部的“运行变更路径推荐”传递给防碰撞运行轨迹控制模块。
13、作为本发明所述的基于北斗网格码的电力巡检实时防碰撞系统的一种优选方案,其中:所述局部实时三维网格图构建模块包括识别设备的长宽高尺寸大小抽象成一个长方体,并和北斗网格大小对比,选择和设备尺寸相匹配的网格层级,确定网格码层级并向下传递。
14、通过三维北斗网格底图数据进行北斗网格位置码定位匹配,对环境采集的点云数据进行解析,将每个点的经纬度根据确定的网格码层级转换成网格编码,并对相同的网格编码进行去重,得到网格编码集合,对局部现实环境网格细化生成局部实时三维网格图。
15、识别实体判断是否具有变化性:当处理不具有变化性的实体占用的网格时,在巡检周边三维北斗网格底图的基础上,对于不具有变化性的实体所占的网格设置为不可通行,更新巡检周边三维北斗网格底图,当处理具有变化性的实体占用的网格时,对于具有变化性的实体所占的网格设置为不可通行,此外,对变化性实体占用不可通行的网格采样并对附近网格进行空间插值计算,预测附近网格的信息,根据预测结果对实体附近网格设置为不可通行、可通行,更新巡检周边三维北斗网格底图。
16、当设备在网格底图中运行时,当设备在网格底图中任一可通行的网格中时,计算可通行网格的邻近网格,并计算设备边界与邻近网格中不可通行的网格的边界距离,当距离超过预警阈值时生成碰撞预警。
17、作为本发明所述的基于北斗网格码的电力巡检实时防碰撞系统的一种优选方案,其中:所述现实环境北斗网格位置码管理模块包括将指定电力巡检区域的设备及周边的现实环境,对实体进行时间空间网格编码,通过对固定实体的点、线、面、体的抽象,对非固定的物体的运行路径与摆动路径进行抽象,通过网格集合的方式对实体进行表达,生成基础三维北斗网格底图数据。
18、作为本发明所述的基于北斗网格码的电力巡检实时防碰撞系统的一种优选方案,其中:所述运行防碰撞实时监测任务配置模块包括任务配置内容包括:碰撞预警阈值配置、监测的设备标识配置、任务触发条件配置、预警发送方式配置和碰撞处理规则配置。
19、对不同被巡检实体安全距离进行配置,添加监测的指定设备标识和检测任务,完成任务配置后,将任务信息下发给运行防碰撞实时监测任务采集模块、运行防碰撞实时分析模块和防碰撞运行轨迹控制模块,当指定设备,进入监测环境时,触发监测任务,当监测到即将发生碰撞时,通过5g方式发送预警给防碰撞运行轨迹控制模块在原路径基础上进行偏移,并在无碰撞危险后控制回到原路径。
20、所述指定设备包括巡检无人机、巡检机器人。
21、所述监测环境包括进入变电站中设备密集安全系数要求高的区域、进入输电通道中线路复杂的区域。
22、作为本发明所述的基于北斗网格码的电力巡检实时防碰撞方法的一种优选方案,其中:所述运行防碰撞实时监测任务采集模块包括对指定设备运行数据采集、对局部环境数据采集。
23、所述指定设备运行数据包括对设备的运行路径信息:巡检设备路径、巡检设备的飞行高度与速度数据;
24、所述巡检路径包括两种路径:第一种为现实环境北斗网络位置码管理模块生成的全局路径规划,第二种为从巡检设备机对应的巡管理系统的外系统通过接口采集获取的路径;
25、所述局部环境数据包括通过安装在巡检无人机、巡检机器人、巡检路径的需要避免碰撞的区域中的激光雷达采集设备和运行防碰撞实时监测任务采集模块之间的一定范围内的环境数据,通过无线和有线方式进行数据的传输。
26、本发明的另外一个目的是提供了一种基于北斗网格码的电力巡检实时防碰撞系统的方法,本发明提出了一种基于北斗网格位置码的电力巡检实时路径防碰撞控制的方法和系统。本系统基于北斗网格码技术体系,对现实环境空间(如变电站、输电线路等)进行网格剖分和编码,构建现实环境空间网格数据底座。当指定设备(如巡检无人机、巡检机器人等)在该环境中进行运动时,平台将监测该设备运行轨迹,并对该设备周边局部环境数据进行采集,在网格数据底座基础上,结合空间插值(spatial interpolation)计算法,对局部现实环境空间进行网格层级的细化构建,并实时进行指定设备的防碰撞计算和分析,优化指定设备的局部运行轨迹,避免碰撞情况发生,从而达到提升指定设备运行安全性以及被巡检的电力设备安全性的目的。
27、作为本发明所述的基于北斗网格码的电力巡检实时防碰撞方法的一种优选方案,其中:通过现实环境北斗网络位置码管理模块生成基础三维北斗网格地图数据进行全局路径规划;设备进入监测环境时触发监测任务,通过运行防碰撞实时监测任务配置模块进行任务配置并将实时监测采集的数据转发给运行防碰撞实时分析模块;运行防碰撞实时分析模块确定网格码层级,从网格管理模块快速匹配生成局部实时三维网格图并对局部网格进行路径通行度分析和结合空间插值法进行碰接风险分析;若有碰撞风险,向运行防碰撞预警提醒模块发送预警提醒,规划出局部新路径,并将局部新路径推送给防碰撞运行轨迹控制模块,控制信息发给设备进行新运行轨迹运行。
28、作为本发明所述的基于北斗网格码的电力巡检实时防碰撞方法的一种优选方案,其中:所述结合空间插值法进行碰撞风险分析包括使用样条函数插值法进行预测,对于预测到的会因树木生长而被占用的网格设置为不可通行,样条函数插值包括规则样条和张力样条:
29、
30、所述规则样条包括计算为:
31、t(x,y)=a1+a2x+a3y
32、
33、所述张力样条包括计算为:
34、t(x,y)=a1
35、
36、其中,a1、a2、a3为通过求解线性方程组而获得的系数,j=1,2,...,n,n为点数,λj是通过求解线性方程组而获得的系数,rj是点(x,y)到第j点之间的距离,r是点与样本之间的距离,τ2是权重参数,ko是修正贝塞尔函数,c是等于0.577215的常数,是权重参数。
37、通过样条插值后对输出的区域进行处理:区域环境的整个空间被划分为大小相等的网格,x方向和y方向上的网格数相等且为矩形,将输入点云数据集中的总点数除以指定的点数值确定网格数,如果数据的分布不均匀时,则这些网格包含的点数会明显不同,若任何一个网格中的点数小于八,则小于八的区域将会扩大到至少包含八个点。
38、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时一种基于北斗网格码的电力巡检实时防碰撞所述的方法的步骤。
39、一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时一种基于北斗网格码的电力巡检实时防碰撞所述的方法的步骤。
40、本发明的有益效果:本发明基于北斗网格码技术体系,在电力巡检工作中,在巡检路径全局环境的基础上通过采集数据结合空间插值算法,通过对网格中的实体的分析,对巡检路径上的局部环境进行实时网格细化和解析,分析运行物与局部环境空间中的实体间的碰撞几率,提供准确碰撞风险实时预警,并进行局部路径优化,减少运行物运行碰撞而造成的损伤,提高巡检的安全性。
- 还没有人留言评论。精彩留言会获得点赞!