水下目标定位方法、系统、设备及介质
本发明涉及水下声传感器网络,尤其是涉及一种水下目标定位方法、系统、设备及介质。
背景技术:
1、水下声传感器网络(underwater acoustic sensor network,uasn)广泛应用于水下目标追踪、目标检测、灾害预警、资源勘探和海洋数据采集等诸多方面。其中,传感器节点的准确位置信息是支持这些应用的基础和关键。然而,在实际的水下环境中,基于声波信号的目标节点定位主要面临以下挑战:一是低速的声波信号(约1500m/s)将会产生较高的通信延迟,导致节点之间难以实现严格的时钟同步;二是由于水介质的不均匀性,声速会随着深度、盐度、压力等因素的变化而变化,出现分层效应,导致信号的声线弯曲现象;三是由于水流场的影响,水下传感器节点会出现被动运动。
2、经检索发现,中国发明授权专利cn105929405b,公开了“异步时钟下水下移动目标协同定位方法”,该方法利用四个潜器的位置和时间戳信息,实现水下目标节点的定位。其中,基于一个潜器的自定位信息实现水流速度的估计,并将其广播给其它节点。该发明考虑了节点间的异步时钟和水流作用下引起的被动运动问题,其中假设声波信号是直线传播的,忽略了分层效应引起的声线弯曲作用对定位的影响。此外,该方法只是利用潜器的自定位实现水流速度的粗估计,并没有对水流场模型进行建模,使得水流速度的估计难以达到理想精度。
3、又经检索发现,中国发明授权专利cn108679459b,公开了“基于声线补偿的海底石油管道泄漏点定位方法”,该方法利用水下传感器和水下机器人之间的声波传播时间差建立方程,考虑了水声信号的弯曲效应。该方法假设水下传感器和水下机器人之间的时钟完全同步,且其位置相对静止,忽略了水流作用下节点的被动运动问题。然而,在实际水下环境,非同步的时钟和被动运动都会给定位结果引入较大误差。
4、因此,如何在异步时钟、分层效应、以及水流环境的影响下,设计水下移动目标的定位方法,以提高位置估计的准确性,显得尤为重要。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供了一种水下目标定位方法、系统、设备及介质,该方法同时考虑了节点之间的异步时钟问题、分层效应引起的水声弯曲效应问题以及水流环境引起的节点被动运动问题,实现了对目标节点的定位、时钟同步以及移动性预测,有效地提高了水下目标节点位置估计的精度。
2、本发明的目的可以通过以下技术方案来实现:
3、根据本发明的第一方面,提供了一种水下目标定位方法,该方法包括:
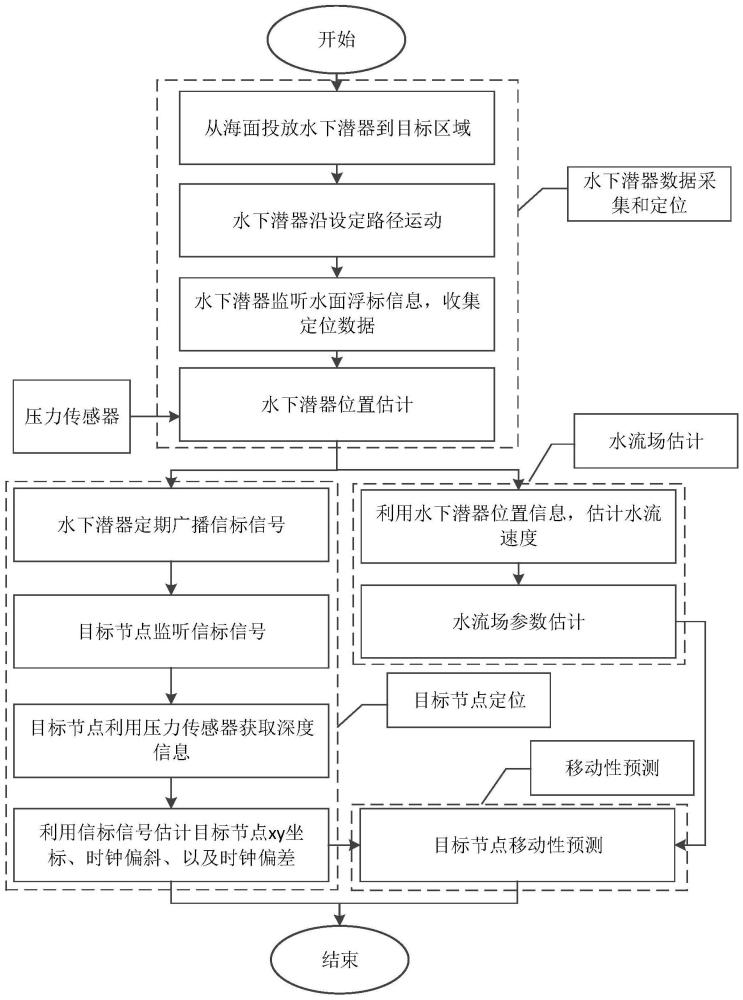
4、水下潜器利用接收到的水面浮标信息进行自定位;其中,自定位过程考虑分层效应引起的水声弯曲效应;
5、基于水下潜器的历史位置信息和自身的推进速度,估计水流速度,构建水流场模型并进行参数估计;
6、接收水下潜器发出的信标信号,估计目标节点的位置和异步时钟参数;
7、基于构建的水流场模型以及目标节点的位置和异步时钟参数,计算得到目标节点的被动移动速度,实现目标节点移动性预测。
8、优选地,所述水下潜器利用接收到的水面浮标信息进行自定位,包括:水下潜器根据水面浮标的位置信息和时间戳信息,建立声线弯曲下的第一传输时延方程,并利用迭代的最小二乘法求解水下潜器的xy坐标;其中,深度信息通过压力传感器获得。
9、优选地,开始定位前,水下潜器和水面浮标之间的时钟已严格同步。
10、优选地,所述水流场模型为与深度信息相关的水流场模型,数学表达式为:
11、
12、
13、
14、
15、式中:pa,i=[xa,i,ya,i,za,i]分别表示水下潜器的第i个位置和目标节点的位置;和分别表示水下潜器在第i个位置处的x轴和y轴上的水流速度,和分别表示在目标节点处的x轴和y轴上的水流速度,za,i表示水下潜器的深度信息,z表示目标节点的深度信息;k1、k2、k3、λ和v表示与环境有关的变量;k4和k5表示随机变量;kd表示与深度信息有关的系数。
16、优选地,所述与深度相关的水流场模型,其参数估计过程包括:首先,根据利用水流速度的频率特性曲线,求得水流参数k1,k4,k5,kd以及λ;其次,利用x轴和y轴上的水流速度公式变换,求得v;最后,在此基础上,利用多目标优化算法寻找k2和k3的最优解。
17、优选地,所述多目标优化算法为模拟退火算法。
18、优选地,所述估计目标节点的位置和异步时钟参数,包括:根据水下潜器的位置信息和时间戳信息,考虑目标节点和水下潜器之间的时钟偏差和时钟偏斜,建立声线弯曲下的第二传输时延方程,并利用迭代的最小二乘法对xy坐标、时钟偏斜以及时钟偏差进行联合估计。
19、根据本发明的第二方面,提供了一种水下目标定位系统,所述系统包括水下潜器和目标定位模块;所述目标定位模块利用所述水下潜器的自定位信息并采用任一项上的方法进行水下目标定位。
20、根据本发明的第三方面,提供了一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现任一项所述的方法。
21、根据本发明的第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现任一项所述的方法。
22、与现有技术相比,本发明具有以下优点:
23、1)本发明提出的水下目标节点定位方法,同时考虑了节点之间的异步时钟问题、以及水流环境引起的节点被动运动问题,实现了对目标节点的定位、时钟同步,以及移动性预测,有效地提高了水下目标节点位置估计的精度提高了定位精度,具有更高的环境适应度。
24、2)本发明在标准的水流场模型基础上,加入了深度信息对其水流速度的影响因子,同时使用水流速度的频率特性曲线和模拟退火优化算法分别估计模型的参数,具有较高的精度。
25、3)目标节点利用所估计的水流场模型参数,计算水流场引起的被动运动速度,从而实现了目标节点的移动性预测,进一步提高了精度。
技术特征:
1.一种水下目标定位方法,其特征在于,该方法包括:
2.根据权利要求1所述的一种水下目标定位方法,其特征在于,所述水下潜器利用接收到的水面浮标信息进行自定位,包括:水下潜器根据水面浮标的位置信息和时间戳信息,建立声线弯曲下的第一传输时延方程,并利用迭代的最小二乘法求解水下潜器的xy坐标;其中,深度信息通过压力传感器获得。
3.根据权利要求2所述的一种水下目标定位方法,其特征在于,开始定位前,水下潜器和水面浮标之间的时钟已严格同步。
4.根据权利要求3所述的一种水下目标定位方法,其特征在于,所述水流场模型为与深度信息相关的水流场模型,数学表达式为:
5.根据权利要求4所述的一种水下目标定位方法,其特征在于,所述与深度相关的水流场模型,其参数估计过程包括:首先,根据利用水流速度的频率特性曲线,求得水流参数k1,k4,k5,kd以及λ;其次,利用x轴和y轴上的水流速度公式变换,求得v;最后,在此基础上,利用多目标优化算法寻找k2和k3的最优解。
6.根据权利要求5所述的一种水下目标定位方法,其特征在于,所述多目标优化算法为模拟退火算法。
7.根据权利要求3所述的一种水下目标定位方法,其特征在于,所述估计目标节点的位置和异步时钟参数,包括:根据水下潜器的位置信息和时间戳信息,考虑目标节点和水下潜器之间的时钟偏差和时钟偏斜,建立声线弯曲下的第二传输时延方程,并利用迭代的最小二乘法对xy坐标、时钟偏斜以及时钟偏差进行联合估计。
8.一种水下目标定位系统,其特征在于,所述系统包括水下潜器和目标定位模块;所述目标定位模块利用所述水下潜器的自定位信息并采用权利要求1~7任一项所述的方法进行水下目标定位。
9.一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1~7任一项所述的方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求1~7中任一项所述的方法。
技术总结
本发明涉及一种水下目标定位方法、系统、设备及介质,该方法包括:水下潜器利用接收到的水面浮标信息进行自定位;基于水下潜器的历史位置信息和自身的推进速度,估计水流速度,构建与深度相关的水流场模型并进行参数估计;接收水下潜器发出的信标信号,估计目标节点的位置和异步时钟参数;基于构建与深度相关的水流场模型以及目标节点的位置和异步时钟参数,计算得到目标节点的被动移动速度,实现目标节点移动性预测。与现有技术相比,本发明同时考虑了节点之间的异步时钟问题、分层效应引起的水声弯曲效应问题以及水流环境引起的节点被动运动问题,实现了对目标节点的定位、时钟同步以及移动性预测,有效地提高了水下目标节点位置估计的精度。
技术研发人员:邱枫,张卫东,吴德烽,郭东生,贾泽华,曹刚,薛珊,张义博,耿雄飞,巩伟杰,陈俊,郭威
受保护的技术使用者:海南大学
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!