一种换流站巡检机器人的路径规划系统及方法与流程
本发明属于直流站/换流站巡检领域,具体涉及换流站巡检机器人的路径规划系统及方法。
背景技术:
1、换流站是电力稳定运行的重要一环,其安全稳定直接影响着电力系统的正常运行,因此,换流站需要进行定期巡检和维护,以确保电力设备的正常运行。然而,换流站通常包括高电压设备、潜在的气体泄漏、高温区域等危险环境。让人工巡检员进入这些环境可能会面临安全风险,基于此,站内采用机器人来代替人类进行巡检,并且可以降低运营成本,减少人员工资和相关支出,减少生产停机时间。出于安全性和巡检效率的考量,需要在机器人巡检前和巡检过程中进行路径规划,一来保证机器人需要按照最短路径快速巡检换流站,以节省时间和资源,二来确保机器人避开危险区域,减少与危险设备的接触,从而提高安全性。
2、公告号为cn 112254731 a的发明专利公开一种巡检机器人、巡检路径规划方法,以及巡检路径规划系统,包括:控制器,用于控制驱动装置,带动巡检机器人行驶;距离传感器,用于当巡检机器人在当前巡路径中行驶时,实时采集巡检机器人底座与地面之间的距离;处理器,用于当巡检机器人底座与地面之间的距离大于第一距离阈值时,发出控制指令至控制器;控制器还用于根据控制指令,重新规划巡检路径,并控制驱动装置工作,以带动巡检机器人根据重新规划的巡检路径行驶。通过该方式,无需对实际地图进行精确测量,也不需要修改机器人巡检地图并设置虚拟墙后,再对机器人重新部署。当禁止通行区域发生变化时可随时去除涂层,以变更禁止通行区域,实现禁止通行区域设置简单化。
3、然而,传统路径规划方法通常处理全局路径规划,但在避障方面可能不够灵活,需要额外的局部路径规划来应对障碍物,并且换流站环境可能会发生变化,传统算法通常不太适用于适应本发明上述这种动态性,现有的路径规划方法该算法在时间方面需要较长的计算时间,尤其是搜索空间较大时,可能会导致路径规划速度很慢,导致时效性差;现有的路径规划方法针对未知环境出现的动态的异常的状况,无法实时对已经规划好的路径进行动态调整;在搜索空间中,常用的a*算法可能会遗漏最优路径。所以需要设计一种高效快速可以实时动态调整的路径规划策略。
技术实现思路
1、本发明的目的在于针对现有技术中存在的问题提供一种换流站巡检机器人的路径规划系统及方法,使用该系统对巡检机器人进行路径规划的方法极大减少了计算最有路径的时间,并且保证了巡检过程中的动态避障,有效的提升了巡检效率和可靠性。
2、本发明的技术方案是:
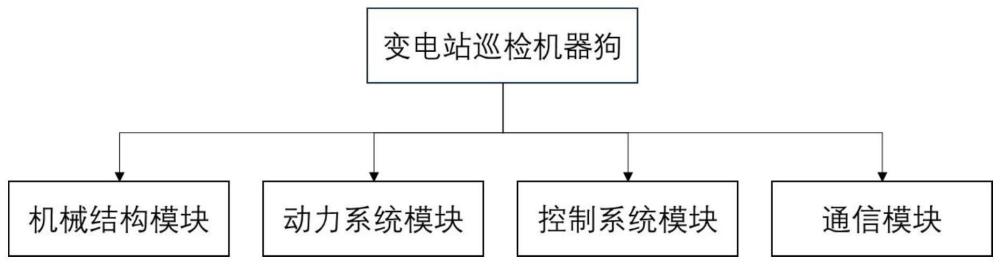
3、一种换流站巡检机器人的路径规划系统,用于规划及控制换流站巡检机器人的行走路径,其特征在于,包括机械结构模块、为换流站巡检机器人提供运动的动力系统模块、用于运算、路径规划和遥控的控制系统模块及用于传输通信数据的通信模块;所述的机械结构模块包括作为运动载体的底盘、用于导航和检测站内物体以及测距的传感器、用于巡检过程中对异常设备的拍摄和记录的摄像设备,所述的巡检机器人设置在底盘上,所述的巡检机器人上设置传感器和摄像设备;所述的动力系统模块包括用于供电的电池和用于提供动力的电机;所述的控制系统模块包括运算控制单元、路径规划算法单元及遥控单元;所述的通信模块包括通信设备和数据传输单元。
4、具体的,所述的传感器包括激光雷达传感器和红外线传感器。
5、具体的,所述的运算控制单元集成处理器和控制单元。
6、具体的,所述的路径规划算法融合了双向a*全局路径规划、基于闭式求解路径优化算法和基于时间空间注意力编码的动态路径实时优化算法。
7、具体的,一种换流站巡检机器人的路径规划方法,使用如上所述换流站巡检机器人的路径规划系统,包括如下步骤:
8、s1、基于遥控单元操控的巡检机器人在换流站的巡检线路上环绕一周,熟悉线路;
9、s2、巡检机器人通过激光雷达传感器、红外线传感器、摄像设备获取环境数据,用于构建环境地图、识别障碍物、以及确定当前位置;
10、s3、基于采集到的传感器数据和图像数据,构建一个初步的点云地图或者栅格地图,用于描述环境中的障碍物和可通行区域;
11、s4、数据预处理,将激光雷达传感器、红外线传感器、摄像设备采集的多模态数据进行预处理操作,如数据增强或者归一化;
12、s5、数据编码,将激光雷达传感器、红外线传感器、摄像设备采集到的多模态数据进行编码适合transformer模型输入的形式,包括将连续的数值数据进行离散化,并将离散化的数据转换成向量形式,并且将数据序列化;
13、s6、数据特征提取,将激光雷达传感器、红外线传感器、摄像设备采集到多模态数据进行特征提取,其中激光雷达传感器、红外线传感器获取的云数据采用resnet18进行特征网络提取,摄像设备拍摄的可见光图像采用darknet53网络进行特征提取;
14、s7、将激光雷达传感器、红外线传感器、摄像设备采集到的多模态数据融合为bev格式;
15、s8、对于输入的多通道bev图像b(x,y),通过多层自注意力机制和位置编码来提取特征f(x,y):f(x,y)=transformer(b(x,y)),其中f(x,y)表示特征图,在坐标(x,y)处的特征值;
16、s9、经过自注意力机制和位置编码提取特征后,形成整个换流站巡检机器人的bevmap映射分布图和目标检测;
17、s10、基于得到的bev map映射分布图,采用双向a*算法计算对巡检机器人的路径进行规划设计;
18、s11、将上一步骤中双向a*算法规划的路径通过基于多项式闭式求解算法和基于transformer时空动态微调进一步路径优化;
19、s12、将机器人历史巡检过的路径轨迹,经过多项式闭式求解算法优化后的路径和当前时空环境状态作为输入,送到时间空间注意力编解码网络,预测下一时刻巡检机器人的运行状态;
20、s13、基于通信模块将传感器数据,包括图像和测量值信息定时发送到平台以供记录和回溯查询。
21、具体的,所述的步骤s7将激光雷达传感器、红外线传感器、摄像设备采集到的多模态数据融合为bev格式包括如下步骤:
22、s7-1:对于激光雷达传感器、红外线传感器采集到的雷达点云数据,将三维点云投影到一个二维平面上,然后对该平面进行栅格化,以生成一个高度图;
23、s7-2:对于雷达数据,将距离、角度信息转换为笛卡尔坐标,然后在bev平面上进行栅格化;
24、s7-3:对于摄像设备采集到的图像数据,将图像数据投影到bev平面上,生成一个颜色或强度图;
25、s7-4:将这些bev格式的数据叠加在一起,形成一个多通道的bev图像,设激光雷达的bev高度图为h(x,y),雷达的bev距离图为r(x,y),相机的bev强度图为i(x,y),则多通道的bev图像可以表示为:b(x,y)=[h(x,y),r(x,y),i(x,y)],其中b(x,y)表示多通道bev图像在坐标(x,y)处的像素值,[]表示通道叠加。
26、具体的,所述的步骤s10基于得到的bev map映射分布图,采用双向a*算法计算机器人巡检的规划路径包括如下步骤:
27、s10-1:初始化起点和终点,并分别给它们分配初始的启发式函数值即估计从起点到终点的距离;
28、s10-2:初始化起点和终点的优先级开放列表,分别用来存放待扩展的节点;
29、s10-3:从起点和终点同时开始搜索,每次选择优先级最低的节点进行扩展;
30、s10-4:对于当前被选择的节点,计算并更新它的启发式函数值h(n)、代价值g(n)以及总的估计值f(n),其中f(n)=h(n)+g(n),g(n)即从起点到该节点的实际路径长度,f(n)即启发式函数值加上代价值;
31、s10-5:进行正向搜索;
32、s10-6:进行逆向搜索,步骤与正向搜索一样;
33、s10-7:判断步骤s10-6和步骤s10-5的返回值,如果返回开放列表为空,仍未到达目标节点,则提示搜索失败状态,选择正向搜索的路径为最终路径;如果返回搜索完成标志,则显示完全路径。
34、具体的,所述的正向搜索的步骤如下:
35、(1).在开放列表中取出最优估计距离节点,如果开放列表已空,则说明正向搜索了所有能搜索的节点还没有到达目标节点,则返回搜索失败结果,否则进行步骤②;
36、(2).更新正向搜索的最佳路径节点,判断最优节点是否在逆向搜索的最佳路径中,若存在,则找到路径,若不存在,将节点添加到正向搜索关闭列表中;
37、(3).对当前最优节点进行处理,找出当前节点的连接点m,若m节点在正向关闭列表中,则搜索下一个m点;否则判断m是否在正向搜索开放列表中,若不在分别计算g(m),h(m),f(m);
38、(4).设置m的父节点为n,并把m按f值从小到大添加到正向搜索开放列表中;
39、(5).判断g(n)加上从n到m的距离是否大于g(m),若大于g(m),则搜索n的下一连接点,否则重新计算g(m),h(m),f(m),
40、直到与n有连接的节点搜索完毕。
41、具体的,上述步骤s11中通过多项式闭式求解算法进行路径优化,具体包括如下步骤:
42、s11-1:将双向a*算法规划的路径中用k来表示路径的分段数,用k+1来表示选择的节点个数,其中每段的两个点之间的连续轨迹用n阶多项式表示如下:
43、
44、其中p0,p1,...,pn为轨迹参数(n+1个),设参数向量p=[p0,p1,...,pn]t,则轨迹可以写成向量形式为:p(t)=[1,t,t2,...,tn]·p;
45、s11-2:轨迹按时间分成k段,每段各用一条多项式曲线表示,并根据路径点,计算每段的距离,按距离平分时间t(匀速时间分配),
46、得到时间序列:
47、s11-3:针对巡检机器人的平滑运动,选用每段的起始点和终点的位置、速度、加速度的确定值限制,中间航迹点使用位置限制,表现如下:
48、
49、s11-4:针对最小化加速度的变化为例,构建阶数为5的多项式,那么它将有6个未知的系数,通过对轨迹进行多次求导,寻找将轨迹参数映射到成运动量的映射关系,运动量具体指位置、速度和加速度,得到:
50、
51、映射为:di=aipi,得到其中确定d向量的约束(位置,速度,加速度);
52、s11-5:进一步构建一个带约束的qp问题,
53、
54、并将其转换为:
55、
56、其中:p表示位置,v表示速度,a表示加速度,t表示时间,q表示正交矩阵,p表示位置分量,v表示速度分量,a加速度分量,d包括位置、速度、加速度;
57、s11-6:对于任意时刻t,根据参数计算出轨迹的位置p(osition),速度v(elocity),加速度a(cceleration),jerk(角加速度的变化),snap(推力的微分),数学表达为在轨迹段i和i+1段在相同的时间t,有相同的导数值,表现为:
58、pi(ti)=pi+1(ti)
59、vi(ti)=vi+1(ti)
60、ai(ti)=ai+1(ti);
61、s11-7:为了保持连续性约束,消除重复变量,设计连续性约束构造映射矩阵m,如下:
62、
63、得到d=md′;
64、s11-7:进一步地,其中df表示轨迹中的已经确定的变量,dp表示可以自由变化的变量,其中c为构造置换矩阵;
65、s11-8:设置k=a-1mc,得到
66、s11-9:进一步通过数学带入将约束条件转换到代价函数中,转换为无约束的优化问题,进行闭式求解,针对于步骤s11-1得到的k段轨迹,那么每一段轨迹都是一个高阶的多项式函数,写出代价函数和如下:
67、
68、其中j表示代价函数,是一个标量;
69、s11-10:设置r=ktqk=ca-tqa-1ct,并对r矩阵根据df和dp的尺寸进行分块,则得到如下变换:
70、
71、s11-11:q矩阵是对称矩阵,ca-tqa-1ct=(ca-tqa-1ct)t,说明r也是对称矩阵,得到进而
72、s11-12:令j对dp的导数求极值点,基于
73、算出求得dp,依据公式进而求得p,得到优化后的路径。
74、本发明的有益效果是:本发明基于transformer的可见光与雷达激光点云融合bevmap的生成,提供了完整的巡检线路的空间位置信息,并在融合bev map的同时完成目标检测模型的训练,用于直流站/换流站缺陷及异常巡检。
75、本发明融合了一阶段双向a*全局路径规划、二阶段基于闭式求解路径优化算法和三阶段基于时间空间注意力编码的动态路径实时优化的局部路径规划算法的直流站/换流站机器人路径规划策略和装置,极大减少了计算最有路径的时间,并且保证了巡检过程中的动态避障,有效的提升了巡检效率和可靠性。
- 还没有人留言评论。精彩留言会获得点赞!