一种毫米波雷达智能家居感知方法与装置
本发明属于雷达目标跟踪与识别,具体为一种毫米波雷达智能家居感知方法与装置。
背景技术:
1、随着智能技术的发展以及人们对高质量生活的追求,智能家居产业获得迅速发展,与此相适应,智能家电、全屋智能、健康监测等已成为行业的发展趋势。传统的接触式感知与控制已无法满足智能家居的要求,非接触式感知与人机交互成为发展的方向。
2、毫米波雷达作为一种重要的高精度感知手段,具有作用距离远、抗环境干扰能力强、不涉及个人隐私、实时性高等优势,可以规避语音、可见光等交互方式的缺点,具备作为一种新的智能家居传感器的能力,能够为非接触式感知与控制提供精确的信息,提高家电、厨卫、健康设备的智慧程度,适用于家庭、养老院、宿舍、办公室、社区等场所,改善用户体验,提升生活、学习、办公的便捷性、舒适性和安全性。
3、同传统感知方式相比,本发明提出的毫米波雷达具有以下优点:
4、感知距离远,范围广,既可以顶装,也可以侧装;
5、抗干扰能力强,环境适应性好,不涉及个人隐私;
6、不仅能够获得目标的位置、速度等参数,而且能够识别目标类型,判断目标姿态,检测体征信号,提供的信息更丰富,更有利于智能家居品质的提升;
7、支持有线或无线等多种接口,便于同家电、移动终端、物联网设备、计算机、嵌入式硬件等进行连接,信息利用方式更灵活;
8、采用软件化雷达架构进行设计,不仅便于进行功能升级和固件更新,而且能够更好的控制成本,有利于大范围推广使用。
9、本发明充分利用毫米波雷达的频段优势,克服现有感知手段的缺点,为智能家居模块和系统提供所需的精确信息。
技术实现思路
1、鉴于居家应用的代表性和广泛性,下面以居家应用(例如家电控制、健康监测)为例对本发明提出的毫米波雷达感知方法和装置进行说明。但本发明所提的方法和装置并不限于居家应用。
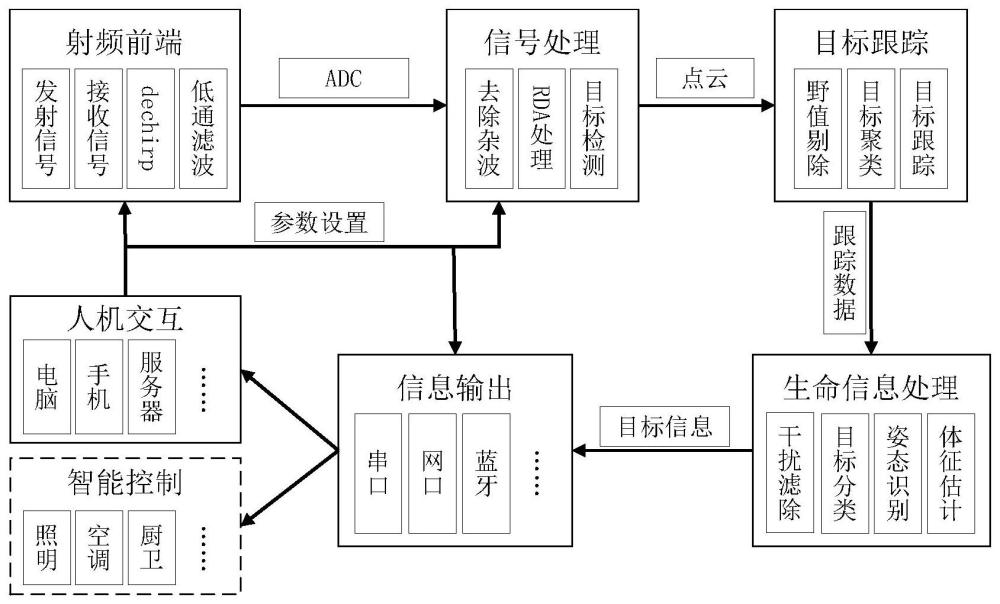
2、本发明提出一种基于软件化雷达架构的毫米波雷达智能家居感知装置,该装置包括雷达射频前端模块、信号处理模块、目标跟踪模块、生命信息处理模块、信息输出模块和人机交互模块,如图1所示。图1中虚线框部分的“智能控制”模块不属于本发明的范围,示于图中只是为了说明本发明提出的毫米波感知方法和装置可以为家居家电控制等应用提供信息。
3、雷达射频前端完成chirp信号(lfmcw)的发射和接收,并对接收的回波信号进行dechirp处理和低通滤波,得到中频模拟信号s(t),经模数转换器(adc)采样后得到数字信号s(n);信号处理模块对s(n)进行处理得到目标点云pi(r,α,β,v),其中,r表示距离,α表示方位角,β表示俯仰角,v表示速度;目标跟踪模块对pi(r,α,β,v)进行处理,得到目标的位置locj(x,y,z)和运动vj(vx,vy,vz)数据,其中,x、y、z分别表示在x、y、z轴上的距离,vx、vy、vz分别表示在x、y、z轴上的速度;通过对locj(x,y,z)和vj(vx,vy,vz)数据的统计处理,生命信息处理模块可以滤除绿植、窗帘等干扰目标,识别出目标类别、估计出目标的姿态以及呼吸心率等参数;信息输出模块支持串口、网口、蓝牙等传输方式,用于输出目标信息数据;人机交互模块支持鸿蒙、windows等操作系统,可对射频参数、处理参数、接口参数等进行配置,并显示输出的结果。
4、为进一步明确本发明的技术方案,现提出一种毫米波雷达智能家居感知方法,处理流程如图2所示,该方法包括步骤如下:
5、步骤一:雷达上电启动后,首先进行室内边线和自身安装高度的估计。将窗户、墙面、地面、天花板反射的三维点云坐标pi(r,α,β)转换为直角坐标pi(x,y,z),然后对每条边线处的点进行线性拟合,即可估计出室内墙左右边线的长度、宽度以及天花板高度和雷达高度
6、(lleft,lright,wleft,wright,hceil,hradar)。估计的(lleft,lright,wleft,wright,hceil,hradar)将作为参量进行保存。
7、由于窗户、墙面、地面、天花板等散射的不均性,点云强度差别较大,强散射点的旁瓣可能淹没弱散射点。为了减弱强散射点对弱散射点的影响,同时又避免分辨率和信噪比变差,我们采用空间变迹法滤除散射点的旁瓣,减小散射点之间的相互干扰。空间变迹法的计算过程如下:
8、最优权重值估计:
9、滤波结果:
10、其中,w(n)为权重值,g(n)为滤波前的值,g′(n)为滤波后的值。
11、步骤二:进入正常检测流程后,信号处理模块首先滤除静止杂波,保留运动目标(例如行走的人)信号和微动目标(例如呼吸、心跳)信号,滤波方法如下式:
12、
13、
14、其中,为滤除静止杂波后的信号,为n时刻之前m个慢时间周期时刻对环境回波的统计值,表示前一时刻的环境回波统计值,η为[0,1]之间的权重值,只有当环境中没有活体目标时才进行更新。
15、步骤三:距离-多普勒-角度(rda)处理。分别进行快时间fft、慢时间fft、俯仰向fft以及方位向mvdr处理,得到目标的距离r、速度v、俯仰角α和方位角β;经过目标检测获得感兴趣的目标点pi(r,α,β,v)。在进行俯仰角处理时,应用clean算法减小目标点之间的相互干扰,以提高角估计精度,并可能获得更密集的目标点云。clean过程如下:
16、(1)设俯仰向fft结果为sa[k];
17、(2)搜索得到俯仰向fft频谱|sa[k]|的最大值max[k];
18、(3)从sa[k]中减去最大值对应的频域响应,得到新的sa[k]:
19、sa[k]=sa[k]-max[k]×sin c[k]
20、其中,sinc[k]为系统的频域响应;
21、(4)重复(2)-(3),直至满足预设的clean次数n。
22、步骤四:目标跟踪模块首先依据(lleft,lright,wleft,wright,hceil,hradar)筛选点云数据,剔除房屋范围外的点,这样就滤除部分多径点。然后对点云进行聚类处理。我们采用基于密度的聚类思想进行点云的聚类处理。由于雷达点云密度的非均匀性,传统基于密度的聚类方法性能下降,因此我们对聚类方法进行了改进。具体过程如下:
23、(1)选定一个起始点pi(r,α,β,v),根据距离门限rthr进行粗聚类,当rij<rthr时,i和j两点属于一类点集cluster(m)。rij为点pi和pj之间的距离;
24、(2)根据速度v和方位角β对每一类cluster(m)中备选点进行筛选,cluster(m)中的点必须同时满足下式:
25、
26、δβi=|βi-βmedian|≤δβ
27、其中,为cluster(m)中所有点的平均速度,σv为预设的速度偏差门限,βmedian为cluster(m)中所有点的方位角的中值,δβ为预设的角度范围门限;
28、(3)给定初始参数(ε,mmin),ε为邻域距离门限,mmin为邻域最小点数门限。遍历cluster(m)中的点计算两两之间的欧式距离|rij|,记录每一个点的|rij|≤ε邻域内的点数mi(seed);
29、(4)若存在mi(seed)≥mmin,且在所有邻域中mi(seed)最大,则把这个点作为核心点邻域内的所有点作为种子点;
30、(5)用下式更新参数ε
31、ε=max{|rij(median)|,|rij(mmin)|}
32、其中,|rij(median)|为邻域内点间距离|rij|的中值,|rij(mmin)|为邻域内点间距离|rij|中第mmin个最小距离;
33、(6)以(4)中得到种子点为起始点,以更新后的ε为半径在cluster(m)中进行搜索,满足|rij|≤ε的点属于当前类cluster(m);
34、(7)对剩余的点云重复这一聚类过程。
35、聚类过程结束后,当类内点数满足mi(cluster)>mmin时,保留这个类,否则删除这个类。对保留类的核心点邻域内的点进行平均计算,得到作为目标的距离、角度、速度参数。
36、步骤五:多目标跟踪。借鉴多假设跟踪的思想,利用人员运动的先验信息对目标关联进行合理的限制,即可简化计算,又能得到较好的跟踪效果。将人员的运动状态分为静态和动态两种,静态包括站、坐、躺三种姿态,动态包括走一种姿态。在进行多目标跟踪处理时,做如下假设:
37、(1)姿态关联权重
38、
39、表中的数值为目标关联时的权重值,关联权重为1,表示极有可能关联,关联权重为0,表示不可能关联,关联权重为0.5表示可能关联。加入关联权重值的假设概率计算如下:
40、p{gk,l|zk}=wij×p{gk,l|zk}
41、其中,wij是姿态关联权重,p{gk,l|zk}是在k时刻在量测zk条件下第l个事件发生的概率。这一假设对不同姿态间的转换进行了限制,相同姿态间的关联具有最高优先级。
42、(2)动态和静态之间的转化限制,转换速度门限为vpose。对于从动态转化为静态,需要各轴的速度均小于vpose,而对于从静态转为动态,需要各轴的速度均大于vpose。
43、(3)静态目标跟踪的消除经过延时处理,即假设在延时间隔tdelay内,无论何种情况,静态目标均不会消失。
44、步骤六:根据轨迹信息以及tmd时长的时序多普勒特征,区分目标是绿植、窗帘、电扇或人。只对静态目标进行区分,以时序多普勒标准差σfd作为主要特征,当σfd>σfdthr时,目标为非人目标。
45、步骤七:根据动态目标在高度上的差异,可以判断目标是成人、儿童还是宠物。设定成人高度判断阈值hadult和宠物高度判断阈值hpet,当目标高度htarget>hadult时为成人,当htarget<hpet时,为宠物,当hpet<htarget<hadult时,为儿童。
46、步骤八:根据目标定位信息以及在高度上的变化可以识别出目标处于站、坐、躺、睡眠等各种姿态。目标高度变化hdown=δh/hwalk,其中δh为当前高度与历史高度的差值,hwalk为历史高度。设定高度变化比阈值hsitratio和hlieratio,当hdown>hlieratio时,为躺姿态,当hdown<hsitratio时,为站立姿态,当hlieratio>hdown>hsitratio时,为坐姿态。当处于躺姿态的目标在时间间隔tsleep内未发生姿态转换和动态动作,则认为目标进入睡眠状态。目标类别和姿态信息将反馈给跟踪模块,以提高跟踪精度。
47、步骤九:进一步,根据高度变化率hgrad以及变化程度,再结合速度的变化,可以判断行人是否发生跌倒动作。当
48、
49、且速度小于vpose时,则断定发生跌倒;其中,tfall为设定的跌倒观察窗,h1和h2分别为观察窗起始和结束时刻对应的高度,hgradthr为跌倒阈值。设定延时观察窗t′fall,如果t′fall内高度不超过hfallsure,则确认为跌倒,此确认过程可以过滤掉弯腰、下蹲等与跌倒相似的动作。
50、步骤十:对于静态人员,雷达将估计其呼吸、心跳的频率。在tbh时长内提取目标的相位信号,对相位信号进行线性回归处理,通过[0.05,2.5]hz带通滤波器滤除杂波信号,然后通过经验模态分解+fft的方法得到各信号分量频谱,选取[0.2,0.6]hz之间的分量估计呼吸频率,选取[0.8,2.0]hz之间的分量估计心跳频率。对于呼吸、心跳检测过程中发生的明显身体动作,采用窗长为tslid的滑窗进行剔除,即当发现身体异动后,舍弃本次处理,信号滑动tslid时长后继续处理。
51、处理流程结束后,将处理模块得到的目标的各种信息按需要进行输出,以实现智能家居的具体功能。
52、本发明的优点及有益效果在于:在不涉及个人隐私的前提下,解决室内复杂环境中的静态、动态人员检测,静态、动态多人交叉高精度跟踪定位,并能滤除室内常见干扰目标,对人员进行分类,识别人员姿态,估计呼吸、心跳频率等生命体征。由于采用了软件化雷达架构,便于进行功能重构,因此可以用较低的成本实现多功能的雷达,为智能家居提供更丰富的感知信息。
- 还没有人留言评论。精彩留言会获得点赞!