一种用于结构光条纹轮廓投影的相位校正方法及系统
本发明属于光学三维测量,涉及一种用于结构光条纹轮廓投影的相位校正方法及系统。
背景技术:
1、结构光条纹轮廓投影(fringe projection profilometry,fpp)是一种无接触、高精度的光学三维测量技术。fpp已广泛应用于医学成像、制造业、考古学、包裹分拣、机器人和计算机视觉等。传统的fpp由一个或两个摄像头和一个投影仪组成。通过投影仪将一组编码的条纹图案投射到物体上,并由相机捕获变形的条纹图像,通过解码和三角测量可以恢复物体的三维信息。相位展开是基于条纹投影轮廓术(fpp)的三维形状测量的关键问题,由于反三角函数运算,检索到的相位被包裹在-π和π之间,对进一步的相位到深度映射是模糊的。为了消除相位模糊,提出了空间和时间相位展开方法。空间相位展开方法通过判断相邻像素之间的相位差来检测和消除2π相位跳跃,而时间相位展开(temporal phaseunwrapping,tpu)方法通过投影额外的模式来唯一地标记包裹相位的每个周期来消除相位模糊。由于采用逐像素的相位展开,tpu方法更适合应用于复杂和孤立的场景,这类型的方法主要通过匹配包裹相位和相应的条纹顺序来消除相位模糊,对于复杂或孤立的测试场景具有较好的适应性,但在实际测量中,tpu方法存在相位展开误差,严重影响最终的三维重建结果。误差来源主要有两种类型,一是由光学系统噪声和环境光干扰等因素引起的相位展开随机误差,该误差的振幅分布比较均匀;二是由于反切线计算和包裹相位与条纹顺序的不对等导致的误差,这种误差大部分聚集在被包裹相位的不连续点上,称为跳变误差。
2、实际测量中,相位展开容易受多种因素产生误差,首先相机捕获条纹图像时,摄像头或传感器等硬件产生的噪声会影响图像质量,其中传感器的噪声包括暗电流噪声、读出噪声、增益噪声等,摄像头的噪声包括热像噪声、固定模式噪声等。第二,除了硬件因素,图像采集时光线不足、照明不均匀等环境因素也会干扰图像质量。第三,图像传输过程中可能会被噪声干扰,例如信号衰减、电磁干扰等。第四,由于光学系统原因会引起部分非线性误差。第五,条纹图像计算相位过程中,由于反正切函数的局限性,使得相位的周期边缘模糊,在边界相邻的像素区域容易出现相位展开误差。除了以上原因,还有算法的不完善、计算机算力不足等原因。根据相位展开后相邻数值的误差变化幅度,可以将变化较大的误差称为跳跃误差,将变化较小的误差称为随机误差。
3、其中,随机误差是在实际情况中,由于光学成像系统等原因,相位会出现呈波浪线递增的趋势,相邻相位变化不一致,根据相位计算点云时,会由于相位的波动导致点云抖动,从而使rms变大,影响测量精度。另一种,造成跳跃误差主要是有由于格雷码和相移码的周期不一致引起的周期性误差,这些存在的误差都会影响最终的三维重建结果。
技术实现思路
1、本发明的目的在于解决现有技术在进行光学三维测量技术时,存在相位误差的问题,提供一种用于结构光条纹轮廓投影的相位校正方法及系统。
2、为达到上述目的,本发明采用以下技术方案予以实现:
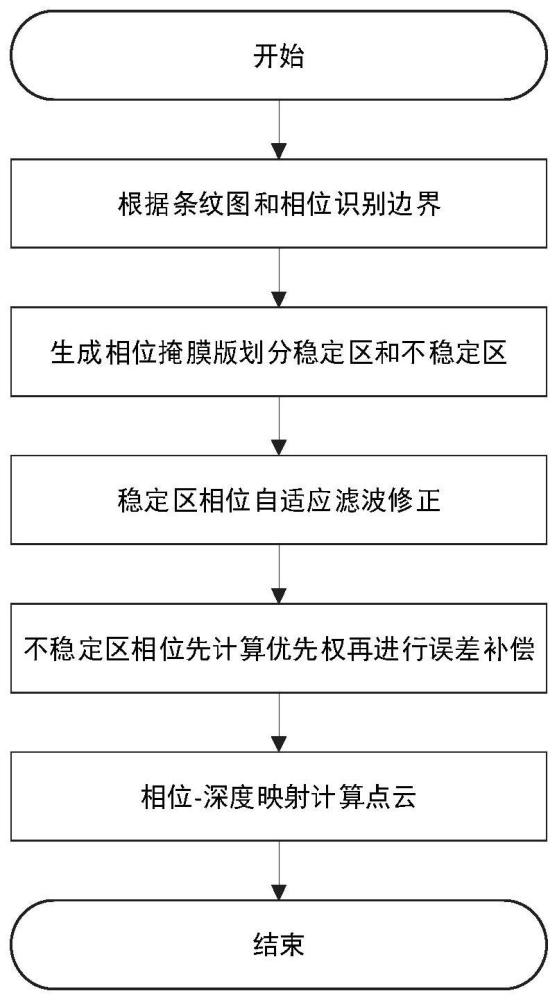
3、一种用于结构光条纹轮廓投影的相位校正方法,包括以下步骤:
4、根据条纹图像得到目标物体的灰度图像,对获取的灰度图像进行第一次边界识别,得到第一次提取的边缘信息;
5、对条纹图像进行解包裹计算相位,得到第二次提取的边缘信息;
6、将第一次提取的边缘信息和第二次提取的边缘信息进行融合得到最终的边界结果,并根据最终的边界结果划分稳定区和不稳定区;
7、对稳定区进行滤波处理,获取该区相位数据的误差分布情况,计算不稳定区内的像素优先权,根据稳定区相位数据的误差分布情况,从优先权像素开始,依次对不稳定区的相位进行误差补偿修正。
8、本发明的进一步改进在于:
9、所述得到第一次提取的边缘信息包括以下步骤:
10、采用sobel算子进行第一次边界识别:
11、分别计算相邻像素的平均梯度和外层像素的平均梯度;
12、基于相邻像素的平均梯度和外层像素的平均梯度获取中心像素点的平均灰度估计,对所有像素点依次计算,得到图像所有像素点的灰度值和边缘方向;
13、设定中心像素点阈值,根据设定的阈值和所有像素点的灰度值和边缘方向对图像进行划分,确定稳定区和不稳定区的初步划分边界。
14、通过公式(1)计算中心像素点的平均灰度估计:
15、g(x,y)=|gx(x,y)|/σ+|gy(x,y)|/σ (1)
16、式中,gx(x,y)和gy(x,y)分表示x方向和y方向的梯度值;σ表示衰减因子;
17、对选取的阈值进行二值化处理:
18、设定窗口大小,在窗口内去除最大值和最小值后取均值作为中心像素点的最终阈值:
19、
20、式中,表示窗口内的象素点的灰度值之和。
21、所述得到第二次提取的边缘信息包括以下步骤:
22、对条纹图像进行解包裹计算相位,得到相位梯度和相关性系数卷积;
23、基于相位梯度进行二次边界识别;
24、所述根据最终的边界结果划分稳定区和不稳定区:
25、将第一次提取的边缘信息和第二次提取的边缘信息融合后生成相位掩模版,作为稳定区和不稳定区的划分依据。
26、所述对稳定区进行滤波处理包括以下步骤:
27、在图像的行方向进行均值滤波:
28、
29、
30、式中,w表示以像素点(x,y)为中心,半径为r的一维窗口,输入数据为稳定区相位,n为模板窗口w内的连续的有效像素点,pi表示有效像素点的相位;phase(x,y)表示通过求平均得到像素点(x,y)修正后的相位。
31、对不稳定区的相位进行误差补偿修正包括以下步骤:
32、筛选不稳定区域内优先权最大的像素点,在该点的水平方向寻找最终匹配的像素点;
33、参考稳定区的位误差分布、最终匹配的像素点和待修复点的位置关系进行误差校正;
34、完成误差矫正后更新不稳定区内像素点的相位值和结构掩模版;
35、对不稳定区的像素进行逐个矫正,直至完成不稳定区所有相位矫正。
36、所述不稳定区域内优先权最大的像素点的确定过程包括以下步骤:
37、
38、i=ω+ψ (6)
39、p(x,y)=c(x,y)*phase(x,y)/d(x,y) (7)
40、式中,p(x,y)表示某个像素点的优先权;c(x,y)表示某个像素点的掩膜版;phase(x,y)表示相位值;d表示某像素点和水平方向最近的稳定区像素点的距离;
41、在优先权最高的像素点附近沿水平方向移动,将移动窗口内稳定区域像素数目大于80%且中心像素点属于稳定区的像素点作为最终匹配的像素点。
42、一种用于结构光条纹轮廓投影的相位校正系统,包括初次边缘识别模块、二次边缘识别模块、区域划分模块和修正模块;
43、初次边缘识别模块,用于根据条纹图像得到目标物体的灰度图像,对获取的灰度图像进行第一次边界识别,得到第一次提取的边缘信息;
44、二次边缘识别模块,用于对条纹图像进行解包裹计算相位,得到第二次提取的边缘信息;
45、区域划分模块,用于将第一次提取的边缘信息和第二次提取的边缘信息进行融合得到最终的边界结果,并根据最终的边界结果划分稳定区和不稳定区;
46、修正模块,用于对稳定区进行滤波处理,获取该区相位数据的误差分布情况,计算不稳定区内的像素优先权,根据稳定区相位数据的误差分布情况,从优先权像素开始,依次对不稳定区的相位进行误差补偿修正。
47、一种终端设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如本发明任一项所述方法的步骤。
48、一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如本发明任任一项所述方法的步骤。
49、与现有技术相比,本发明具有以下有益效果:
50、本发明公开了一种用于结构光条纹轮廓投影的相位校正方法,在对边界进行识别时,包括两次边界识别的过程,初次边界识别时通过灰度图进行边缘提取,第二次边界识别时,通过相位计算进行边缘信息提取,通过灰度图和相位图两个方向识别边界,提高了边界识别的精准性,进一步将两次边界识别的结果进行融合,使稳定区的相位不受跳变像素的干扰,保证边界划分的精准性,基于划分后的区域,对稳定区进行滤波处理,减少特征信息的损失,为不稳定区的矫正提供参考信息,减少误差传递,以稳定区为参考对对不稳定区进行误差补偿时,可以减少相位噪声,从而减少点云噪声,提高精度。
- 还没有人留言评论。精彩留言会获得点赞!