一种基于光学短弧航迹关联的轨道确定方法
本发明涉及一种基于光学短弧航迹关联的轨道确定方法,属于航空航天领域。
背景技术:
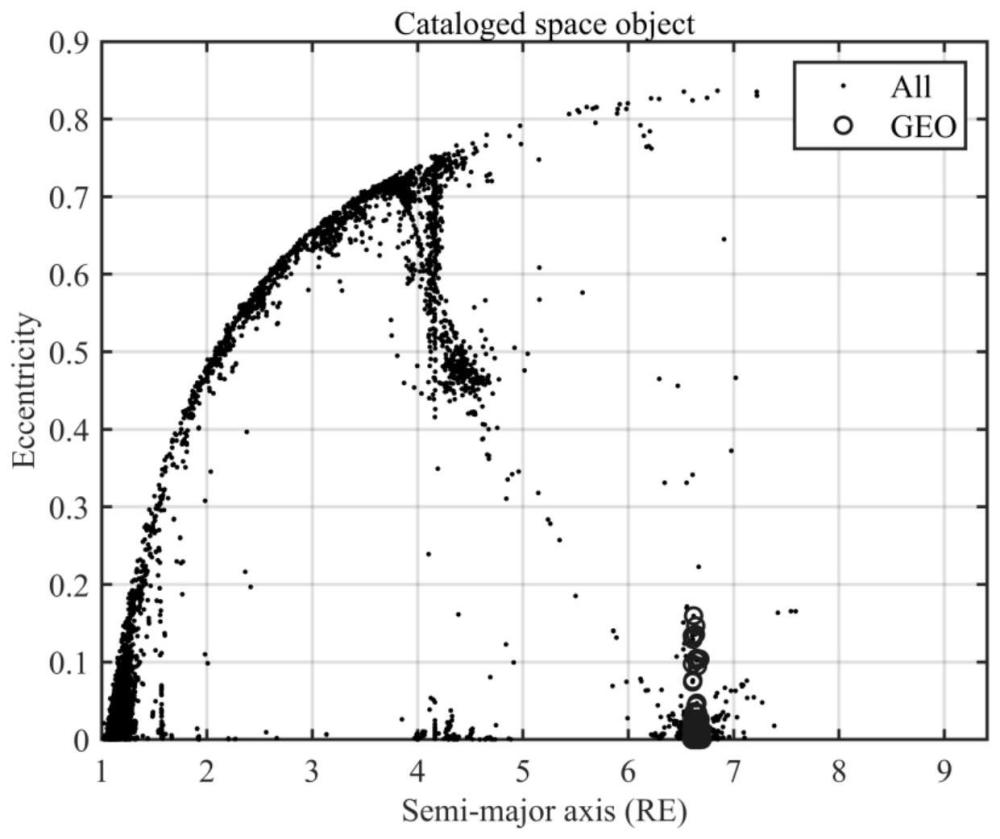
1、随着人类航天活动的不断增加和巨型星座爆炸式的发展,空间物体数量呈现指数级增长。根据美国国家监视网的数据,目前已编目的空间物体约有2.6万个,然而这仅占环绕地球的空间目标总数的极小部分。大部分空间碎片由于观测次数少、时间短而难以被准确编目。此外,空间中的非合作目标众多且具备较高的机动能力,进一步增加了编目的困难性。缺乏这些目标的轨道信息使得准确评估航天器碰撞风险成为挑战。因此,需要依靠空间传感器监测航天器的位置、速度和轨道等信息,并通过轨道计算和预测来评估碰撞风险。
2、全球空间目标追踪与监测网络主要包含雷达、光电及无线电等传感器系统。与雷达探测方式相比,光电跟踪系统探测距离远、运行成本低且设备隐蔽性好,是重要的空间目标监测方式。在光学巡天观测任务中,地面望远镜或者相机系统受到观测条件和任务分配的约束,仅仅能够在短时间段窗口内观测到空间目标。这些观测弧段相对于目标轨道周期较短,通常被称之为航迹或者航迹片段。由于覆盖时间很小,因此尽管单个航迹包含多组测角信息,也无法实现可靠的轨道确定。同时由于航迹时间间隔长、空间目标数量相对较大、轨道不确定度影响以及仅存在光学测角信息,难以对目标航迹进行关联。
3、传统的高斯、laplace、gooding和double-r迭代方法,处理单一弧段仅测角数据获取的轨道状态估值含有显著的误差,在很多情况下算法无法收敛。在最近的研究中,考虑限制性容许域的两点边值问题,通过引入轨道、飞行时间和虚焦点轨道等约束,能够有效地缩小限制性容许域的范围,筛选出关联轨道。但都没有有效利用所有光学测角信息,只使用了航迹对的两个观测信息,导致关联的正确率不高。而滤波方法能够对利用所有观测信息,并能根据归一化新息平方,动态地剔除误关联航迹,提高关联正确率的同时,提高轨道确定的精度。
技术实现思路
1、本发明的目的是提供一种基于光学短弧航迹关联的轨道确定方法,对norad编目数据库的空间目标按轨道高度划分,约束了geo目标的轨道六根数范围;根据轨道的半径范围和航迹对与观测站的几何关系,构建航迹间的轨道位置的可容许域;考虑虚焦点轨迹、零能量飞行时间等约束对可容许域进行限制;将限制性容许域代入兰伯特问题中,求解轨道的状态,并将其转为预测的观测值,计算预测观测值与真实观测值间的马氏距离,筛选获得目标的关联目录以及轨道集合;将目标与每个关联对象的所有轨道离散化为粒子集合,采用自适应聚类方法,将粒子群依据相似性进行划分,实现对每个粒子群的先验协方差的合理估计;以高精度的轨道传播模型为状态方程,以计算目标与地面观测站的赤经、赤纬为观测方程,利用无迹粒子滤波对目标轨道进行伪更新,并计算归一化新息平方,以动态剔除误关联航迹,对目标的关联目录和轨道集合进行更新。利用更新后的目标关联目录和轨道集合,合并目标所在时刻的所有轨道状态,并离散为粒子集合,按关联目录对目标进行聚类无迹粒子滤波更新,并计算归一化新息值来确定轨道状态。
2、本发明的目的是通过以下技术方案实现的。
3、本发明公开的一种基于光学短弧航迹关联的轨道确定方法,首先,根据norad编目数据库的两行轨道根数数据对geo目标的半长轴、偏心率和轨道倾角范围进行分层;根据轨道的半径范围和航迹对与观测站的几何关系,构建航迹间的轨道位置的可容许域;通过引入倾角、零能量飞行时间、几何空焦点等物理约束对轨道位置进行约束筛选;利用兰伯特求解器计算出轨道状态,并转为预测的角度值和角速度值,计算预测值与观测值的马氏距离进行初步筛选,获得目标的关联目录以及轨道集合;将目标与每个关联对象的所有轨道离散化为粒子集合,采用自适应聚类方法,将粒子群依据相似性进行划分,从而实现对粒子群的先验协方差的合理估计;以高精度的轨道传播模型为状态方程,以计算目标与地面观测站的赤经、赤纬为观测方程,对每个集群分别使用无迹粒子滤波方法对目标轨道进行伪更新,并计算归一化新息平方,剔除误关联航迹,对目标的关联目录和轨道集合进行更新,最终完成轨道的确定。
4、本发明公开的一种基于光学短弧航迹关联的轨道确定方法,包括如下步骤:
5、步骤一:容许域的构建
6、将norad编目数据库的两行轨道数数据转化为轨道六根数,按轨道高度进行划分,得到对geo目标的半长轴、偏心率和轨道倾角范围;根据半长轴和偏心率范围计算出轨道的最小近地点rmin和最大远地点rmax也即轨道的半径范围:
7、rmin=amin(1-emax) (1)
8、rmax=amax(1+emax) (2)
9、根据观测站与空间目标的位置几何关系,计算出观测站与目标的视距范围(ρmin,ρmax):
10、
11、
12、式中r为观测站相对地心的位置矢量,u为单位视距方向:
13、u=[cosαcosδ,sinαcosδ,sinδ]t (5)
14、其中,α和δ分别为观测值对应的赤经、赤纬。
15、在视距范围中均匀取点,得到航迹对与观测站的视距ρ1、ρ2,再根据几何关系求得视距所对应航迹与地心间的位置矢量:
16、ri=ri+ρiui (6)
17、即可建立起航迹对的轨道位置容许域r1、r2。
18、步骤二:约束容许域的构建
19、根据倾角约束、零能量飞行时间约束、几何空焦点约束和特殊的兰伯特约束等对步骤一所构建的容许域进行约束筛选。
20、倾角约束:对于geo轨道上的空间目标来说,倾角范围为i∈(-35°,35°)。
21、计算轨道平面的单位法向向量
22、
23、其中,正负号取决于传播是短路径(+)还是长路径(-)。轨道倾角由下式给出:
24、
25、式中,为地心惯性坐标系下的z轴所对应的单位矢量:
26、因此,倾角约束为:
27、
28、零能量飞行时间约束:飞行时间值δttof随着轨道能量的增加而单调减少,正能量的双曲线轨道的飞行时间是最短的,负能量的椭圆轨道的飞行时间总是比零能量的抛物线轨道的飞行时间δtze长,因此负能量约束为:
29、
30、同样,符号取决于传播是短路径(+)还是长路径(-)。式中,参数λ由位置向量定义:
31、
32、式中,r1、r2为轨道状态的位置矢量r1、r2的模长。
33、几何空焦点约束:空焦点必须位于两个位置之间的双曲线上。
34、认为空间目标为开普勒运动,求解空焦点相对于主焦点的位置,得到约束方程:
35、
36、式中,c=||r2-r1||为弧段弦长,p*为极值点,变量f(p*)是为了简化推导和讨论引入的,为:
37、
38、椭圆轨道兰伯特约束:
39、根据椭圆的几何性质,对于一对给定的轨道位置矢量r1和r2,有最小偏心率e0
40、
41、以及有最小半长轴a0
42、
43、通过上述约束筛选后的所有的r1、r2,即为约束容许域。若该航迹对不能建立此约束容许域,则认为该短弧航迹对不关联。
44、步骤三:计算马氏距离,完成初筛选
45、将所有约束容许域中的r1、r2以及航迹对的时间差代入兰伯特求解器中,解算出v1、v2将航迹对的轨道位置速度状态转为轨道六根数,使用半长轴和偏心率的范围进行筛选。根据航迹对与观测站的几何关系,由轨道状态计算出的预测观测值再计算出预测观测值与真实观测值间的马氏距离,而没有通过约束的轨迹对直接赋值为1×1010。马氏距离的计算公式为:
46、
47、其中,cy为观测协方差,真实观测值中的角速度和由弧段中的多个角度值的最小二乘估计得到:
48、记赤经的观测值为αi,i=0,1,...,no,对应的时间为ti,i=0,1,...,no,no为观测的次数,设赤经为时间的函数将在t0时刻泰勒展开至二阶,并忽略三阶高阶项:
49、
50、式中,和分别为在t0时刻的赤经、赤经率和赤经加速度,并设其在ti时刻对应的值为再以最小二乘为估计的最优准则:
51、
52、其中,σα为观测赤经的标准差;分别为赤经的估计值与赤经的观测值堆叠的向量。将近似为式(17)的函数,则待估计的参数为和令正则方程为:
53、n=λx (19)
54、
55、
56、求解上述正则方程(19)-(21),即可求得弧段初始时刻的角速度。
57、设geo目标的阈值为m′,若马氏距离m小于阈值,则认为两光学短弧航迹关联;反之,则认为两光学短弧航迹不来自于同一目标。将两弧段间所有通过约束及阈值筛选后的轨道状态设为一个集合{x:xi=[ri,vi]}。最终得到目标的初关联目录和轨道状态集合。
58、对所有航迹对进行步骤一、二、三后,即可得到目标的初关联目录和轨道状态集合。
59、步骤四:使用聚类无迹粒子滤波进行进一步的筛选,同时完成轨道确定。
60、将初关联航迹对的轨道状态集合中的每一个状态(轨道位置矢量ri和速度矢量vi)看作一个粒子,采用自适应的聚类方法,将粒子群依据相似性进行划分:
61、首先从轨道状态集合中随机选取k个聚类中心cj(1≤j≤k),计算第i个粒子xi=[ri,vi]与第j个聚类中心cj的欧氏距离,
62、
63、其中,xim和cjm分别表示粒子xi和聚类中心cj的第m个分量,1≤m≤s,s为粒子和聚类中心的维度大小。之后,根据欧式距离划分k个粒子群,并计算每个粒子群的均值,以每个粒子群的均值为新的聚类中心cj。重复上述步骤,直至聚类中心cj不再改变,即完成了对粒子的聚类,获得了粒子群
64、对每个粒子群求均值μj与方差pj,
65、
66、实现对目标轨道状态方差的合理估计;并设定每个粒子群中,每个粒子的权重都为1。
67、以包含各类摄项的高精度轨道传播为动力学方程:
68、
69、式(24),x为轨道状态,t为时间,对应的第k+1步的状态方程为:
70、xk+1=f(xk)+wk (25)
71、以计算目标与观测站间的赤经、赤纬为观测方程,
72、yk=h(x,tk)+νk (26)
73、式(25)和(26)中,xk为状态向量,yk量测向量,f(·)和h(·)分别为系统非线性状态函数和量测函数,wk和νk为两个不相关的高斯白噪声,其均值均为零,方差分别为qk和rk。
74、遍历每个粒子群,对每个粒子群进行伪更新:利用航迹对的所有观测历元,使用无迹粒子滤波对目标的轨道状态进行伪更新:
75、首先对粒子群中粒子点进行比例修正对称采样如式(27),得到2n+1个sigma采样点χ,n为轨道状态的维数,n=6。
76、
77、并计算采样点的相应的均值权重wi(m)和协方差权重wi(c):
78、
79、其中α为比例缩放因子,0≤α≤1。β反应状态历史信息的高阶特性,对于高斯分布β=2。
80、然后将采样点进行非线性状态函数传递,第k步到第k+1步的传递过程为:再计算传递状态预测的均值和方差pk+1∣k:
81、
82、根据式(27),能够得到2n+1个sigma采样点χ′i,和2n+1个sigma采样点的权值wi(m)和wi(c);经过非线性量测函数传递得:能够得到预测的观测值。再求传递过程中的预测均值方差pyy,k+1|k以及协方差pxy,k+1|k:
83、
84、根据k+1时刻的量测值yk+1,可求出滤波增益kk+1,k+1时刻状态估计和估计方差pk+1|k+1:
85、
86、计算采样更新粒子
87、
88、为每个粒子重新计算权重
89、
90、计算粒子群的轨道状态与权重
91、
92、
93、其中,上标cj为粒子群cj,nj为粒子群cj中的粒子数。遍历所有粒子群,并进行加权平均即可得到估计的轨道状态,完成轨道状态的伪更新。计算归一化新息平方nis来判断伪更新是否正确:
94、首先计算真实观测值yk与预测观测值的残差:
95、
96、新息的协方差sk:
97、
98、其中,hk为测量函数的线性化矩阵,rk为测量协方差。
99、最终计算归一化新息平方nis:
100、
101、geo目标的归一化新息平方阈值设为nis′,若归一化新息平方大于阈值,则认为目标关联失败,是伪关联航迹,将其剔除,更新目标的关联目录;若小于阈值则对轨道进行滤波更新。
102、同时为了避免轨道的不确定性导致更新错误,需要将轨道的位置、速度状态转为轨道的半长轴,并计算每个弧段更新后的半长轴变化,通过归一化新息平方和半长轴的收敛情况可以筛除错误关联轨道并完成轨道的确定。
103、有益效果:
104、1、本发明公开的一种基于光学短弧航迹关联的轨道确定方法,对norad编目数据库的空间目标根据轨道高度进行了分层,划分geo目标的半长轴、偏心率和倾角范围;根据轨道半径的范围和航迹对与观测站的几何关系,构建航迹对的轨道位置容许域;考虑倾角、几何空焦点、飞行时间等约束对容许域进行约束,构建约束容许域;利用兰伯特求解器求解出轨道状态,转为轨道六根数后,根据轨道六根数的范围再对其进行筛选;将轨道状态转为预测观测值,在计算与真实观测值间的马氏距离中,使用了估计的角速度值,能够进一步约束容许域,提高关联的正确率,获得更为准确的关联目录和轨道集合。
105、2、本发明公开的一种基于光学短弧航迹关联的轨道确定方法,使用了基于归一化新息平方的滤波的方法,利用了所有的观测历元信息,能够在保障低伪阴性率的同时,剔除初关联中的大量伪关联航迹对,降低关联的伪阳性率,提高后续定轨的精度。
106、3、本发明公开的一种基于光学短弧航迹关联的轨道确定方法,将轨道状态离散化为粒子集,采用自适应聚类方法,将粒子群依据相似性进行划分,能够实现对粒子的协方差的合理估计,以便后续的滤波。
107、4、本发明公开的一种基于光学短弧航迹关联的轨道确定方法,在有益效果3对粒子群进行聚类划分后,使用无迹粒子滤波,利用权重对错误的轨道状态进行了剔除,能够实现高稳健性的轨道确定,为计算空间目标间的碰撞概率提供了基础依据。
- 还没有人留言评论。精彩留言会获得点赞!