一种多光束光场成像装置和方法
本发明涉及光场成像装置和方法,具体涉及一种多光束光场成像装置和方法。
背景技术:
1、激光光场成像技术,通过主动发射多束激光扫描目标,并采用多探测器阵列接收解调激光回波能量信号,重建目标高分辨图像。该技术在空间目标观测、遥感成像等领域具有广阔应用前景。多光束干涉光场成像技术本质上是一种计算光学技术,基于光信息处理理论提高目标信息获取量,该技术近年来已得到学者广泛关注和研究。激光光场成像技术在接收端不需要高面型精度的光学镜面,有望突破传统光学成像技术对相机口径、镜面面型等约束,共焦不共面、低面型要求的光学接收器和点探测器阵列具有低成本的特点,可以在提高分辨率的同时节约光学制造成本。
2、光场成像技术是一种利用多束激光形成干涉光场扫描被测目标,以间接的形式进行重建成像的方法。光场成像技术通过激光发射阵列,主动发射两束或者多束相干激光扫描被测目标,在被测目标表面产生干涉光场,进而对反射的回波信号进行信号解调,相位闭合抑制湍流扰动影响等处理,最终重建被测目标高分辨图像。这种光场成像技术相比于传统的干涉计算成像技术,有望突破衍射极限,提高成像分辨率,并且存在一定的主动性,在天文、航天、目标远距离探测领域具有广阔应用前景。
3、国内外学者也深入研究了光场成像技术:美国空军研究实验室(afrl)将光场成像技术理论付诸实践,组织了主要针对中高轨道运动目标成像的同步轨道目标光学成像国家试验项目(glint)和主要针对低轨道运动目标成像的卫星主动成像国家试验项目(saint)。中国科学院长春光机所进行了傅里叶望远镜室内外原理验证实验,中国科学院西安光机所采用一种新型的全局相位闭合算法和改进解调算法来消除光强闪烁和相位抖的影响,并进行了实验验证。
4、但在以上方法中的激光光场成像系统目前都是基于地基三光束成像模型构建的。地基光场成像系统不受尺寸、质量和体积的限制,但是受大气湍流影响较大。大气湍流会影响地基平台采样的频谱分量的精度,进而造成成像质量的退化。如果在天基光学平台条件下构建天基光场成像系统,则可以不受大气湍流影响,不需要进行相位闭合消除大气湍流,且探测距离远,像质更清晰。因此理论上使用更少光束就可以构建基于光场成像技术的成像系统。
5、目前主流的天基大口径空间望远镜大多是拼接式望远镜,例如哈勃望远镜和韦伯望远镜,二者都需要高要求的子镜镜片面形精度和拼接镜控制精度,这些都大大增加了制造成本与难度,现有传统天基拼接式大口径光学成像系统存在口径难做大、光学制造难度大、发射成本高等技术问题。而光场成像技术作为主动合成孔径成像技术,只需要拉长激光束之间的基线长度就可以降低光学成本、扩大光学系统等效口径,激光阵列发射多束激光在目标表面形成运动干涉光场的方式获取目标的空间频谱,对得到的激光场回波信号进行数字信号处理操作便可以重构目标高分辨图像。相较于目前的天基大口径空间望远镜主流系统设计,天基光场成像技术可以降低光学制造成本和航天发射成本等。天基光学系统受发射包络及质量体积包络严苛限制,天基光学系统口径难于做大,该技术有望解决天基光学口径难做大的技术瓶颈。该技术由于采用激光主动照明的技术体制,对空间暗弱目标的观测也有一定的优势。但目前关于天基激光光场成像技术未见公开文献报道。
6、因此,探索一种在空间环境平台无大气湍流影响下的天基两光束光场成像理论模型和技术是天基空间目标探测领域中的新型前沿方向。
技术实现思路
1、本发明的目的是提供一种多光束光场成像装置和方法,以解决现有的地基光场成像装置易受大气湍流影响造成成像质量退化的问题,以及天基光学系统受发射包络及质量体积包络严苛限制,导致光学系统口径难做大的技术问题。
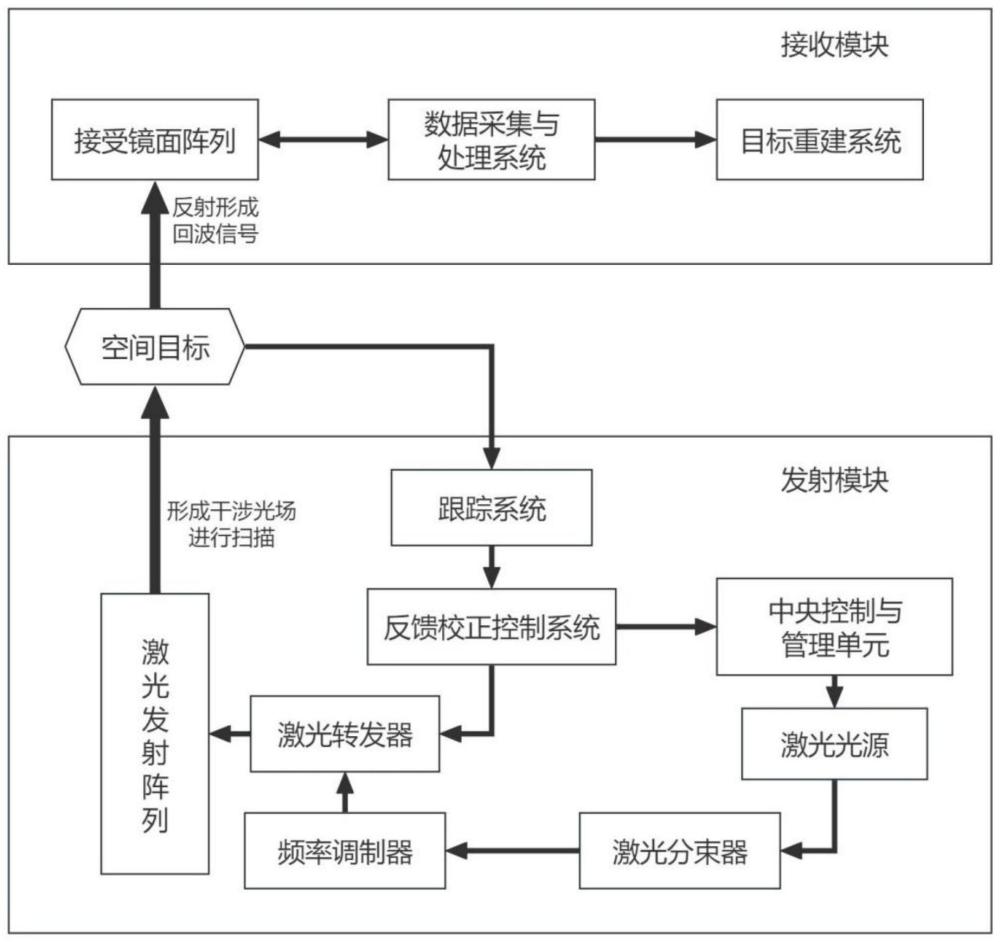
2、为了达到上述目的,本发明提供了一种多光束光场成像装置,其特殊之处在于:包括分别与空间目标对应的发射模块和接收模块;
3、所述发射模块包括跟踪系统、反馈校正控制系统、激光发射处理系统、激光转发器和激光发射阵列;
4、所述跟踪系统的作用端与空间目标对应,其输出端与反馈校正控制系统的输入端连接,用于实时获取空间目标的位置信息,并发送至所述反馈校正控制系统;
5、所述反馈校正控制系统的第一输出端与激光发射处理系统的输入端连接,用于在获取到所述位置信息时,向所述激光发射处理系统发送启动信号,并对获取到的所述位置信息进行分析校正;
6、所述激光发射处理系统的输出端与激光转发器的第一输入端连接,用于获取到所述启动信号时,发射出经频率调制处理后的多束不同频率的激光光束;
7、所述激光转发器的输出端与激光发射阵列的输入端连接,激光转发器的第二输入端与反馈校正控制系统的第二输出端连接,激光转发器用于获取多束不同频率的激光光束以及分析校正后的所述位置信息,并转发至激光发射阵列;
8、所述激光发射阵列的发射端与空间目标对应,用于根据分析校正后的位置信息,向空间目标发射多束不同频率的激光光束,在空间目标区域内产生干涉光场,并根据位置信息对空间目标进行实时跟踪扫描;
9、所述接收模块包括接受镜面阵列、数据采集与处理系统以及目标重建系统;
10、所述接受镜面阵列的接收端与空间目标对应,用于接收空间目标的回波信号;
11、所述数据采集与处理系统的输入端与接受镜面阵列的输出端连接,用于对所述回波信号进行解调分类处理;
12、所述目标重建系统的输入端和数据采集与处理系统的输出端连接,用于根据所述解调分类处理后的信息对所述空间目标进行重建。
13、进一步地,所述激光发射处理系统包括中央控制与管理单元、激光光源、激光分束器以及频率调制器;
14、所述中央控制与管理单元的输入端与反馈校正控制系统的第一输出端连接,其输出端与激光光源连接,用于接收所述启动信号,并根据预设激光参数启动所述激光光源;
15、所述激光光源的激光输出端与激光分束器的输入端连接,用于向激光分束器发射激光光束;
16、所述激光分束器的输出端与频率调制器的输入端连接,用于对所述激光光束进行分束;
17、所述频率调制器的输出端与所述激光转发器的第一输入端连接,用于接收分束后的激光光束并对其进行频率调制。
18、进一步地,所述激光发射阵列设有多个激光发射孔,用于通过间歇性改变其激光发射孔位置,从而产生不同的干涉光场。
19、同时,本发明还提供了一种多光束光场成像方法,采用上述的多光束光场成像装置,其特殊之处在于,包括以下步骤:
20、步骤1、利用跟踪系统实时获取空间目标的位置信息,并发送至反馈校正控制系统;
21、步骤2、反馈校正控制系统在获取到所述位置信息时,向激光发射处理系统发送启动信号,并对获取到的所述位置信息进行分析校正;
22、步骤3、激光发射处理系统接收所述启动信号,并向激光转发器发射多束不同频率的激光光束;
23、步骤4、激光转发器接收步骤3发射的多束不同频率的激光光束以及步骤2分析校正后的位置信息,并转发至激光发射阵列;
24、步骤5、激光发射阵列向空间目标发射多束不同频率的激光光束,在空间目标区域内产生干涉光场,并根据位置信息对空间目标进行实时跟踪扫描;
25、步骤6、接受镜面阵列接收空间目标的回波信号并发送至数据采集与处理系统;
26、步骤7、数据采集与处理系统对所述回波信号进行解调分类处理;
27、步骤8、目标重建系统根据解调分类处理后的信息对所述空间目标进行重建。
28、进一步地,步骤3具体为:
29、3.1、中央控制与管理单元接收所述启动信号,并根据预设激光参数启动激光光源;
30、3.2、激光光源向激光分束器发射激光光束;
31、3.3、激光分束器将所述激光光束分为多束激光光束;
32、3.4、频率调制器对多束激光光束分别进行频率调制,并将多束不同频率的激光光束发射至激光转发器。
33、进一步地,激光分束器将所述激光光束分为两束激光光束。
34、进一步地,步骤3.4具体为:频率调制器对两束激光光束分别进行频率调制,获得两束频率不同的激光光束,并将两束不同频率的激光光束发射至激光转发器。
35、进一步地,步骤3.4中,调制后的两束激光光束的光波em和en分别为:
36、
37、
38、其中,和为第m个与第n个激光发射孔至空间目标表面的向量;wm和wn为从第m个与第n个激光发射孔发射的激光频率;和为从第m个与第n个激光发射孔发射的激光波矢;和为从第m个与第n个激光发射孔发射的激光相位;t为当前激光发射时间;am和an为第m个与第n个激光发射孔发射的激光幅值;
39、步骤5中,所述干涉光场i(m,n)为:
40、
41、其中,an=am=a,δw=wm-wn,e为常数;i为虚数符号;为激光发射阵列的原点至空间目标表面的向量。
42、进一步地,步骤7具体为:数据采集与处理系统对所述回波信号进行解调分类处理,调制后的回波信号mmn(t)为:
43、
44、其中,i为激光光强,n为采样点数量,o为空间目标的频谱分量;j为求和函数变量;其中,x为空间目标在x轴上的坐标,y为空间目标在y轴上的坐标,dx为关于x的微分,dy为关于y的微分,o为空间目标光强反射率。
45、进一步地,步骤8中,目标重建系统根据所述解调分类处理后的信息对所述空间目标进行重建,重建的空间目标图像g为:
46、g=f-1(o(m,n));
47、其中,f-1为傅里叶逆变换函数式。
48、本发明的有益效果:
49、本发明通过不同频率的光干涉形成的干涉光场扫描空间目标,提取回波信号的频谱信息来重建空间目标图像,可以在无大气湍流条件使用更少的光束完成目标图像的重建。在光场成像实际系统设计实现中,可采用此方法完成天基光学成像平台目标主动型成像要求,降低了天基光学成像平台的搭建成本,提高了系统的可实现性。
- 还没有人留言评论。精彩留言会获得点赞!