基于激光雷达扫描的充电桩识别方法、芯片及机器人与流程
本技术涉及充电桩定位的,具体涉及基于激光雷达扫描的充电桩识别方法、芯片及机器人。
背景技术:
1、关于扫地机器人的回充功能,需要先将机器人导航到能够识别充电桩的地方。
2、充电桩对外发射的充电引导信号一般是红外光束信号,单使用红外引导进行充电桩的定位的情况下,多数机器人采用随机模式去寻找充电器正前方的红外光束信号,由于红外光线的线性特性不好,易受强光干扰且容易被遮挡;存在回充对接成功率低的缺点。
3、现在技术会使用到雷达扫描充电桩并通过对激光点云执行拟合等相关算法来对充电桩进行定位,当充电桩表面是黑色材质或反光材质时,由于激光雷达本身传感器特性,反射回来的激光点云稀缺且不稳定,引起拟合算法执行效果差,会产生找歪找偏(定位出的充电桩位置不符合充电桩实际占据的位置,误将其它物体位置识别为充电桩位置)等问题,不能正确识别充电桩。
技术实现思路
1、本技术公开基于激光雷达扫描的充电桩识别方法、芯片及机器人,提出以下技术方案:
2、基于激光雷达扫描的充电桩识别方法,所述充电桩识别方法用于在充电桩发出充电引导信号时对充电桩进行识别;所述充电桩识别方法的执行载体是装配激光雷达的机器人;机器人的正面安装至少两个信号接收器以接收充电桩发射的充电引导信号;所述充电桩识别方法包括:机器人控制激光雷达对外发射激光线,形成激光扫描区域;从激光扫描区域内设置至少三块探测角区域,使机器人的正前方及其两侧各存在至少一块探测角区域;分别从各块探测角区域内提取出目标激光点的测距数据;再根据不同目标激光点之间的测距差异和所述至少两个信号接收器对所述充电引导信号的接收情况,识别出所述充电桩。
3、综上,本技术根据不同目标激光点之间的测距差异和所述至少两个信号接收器对所述充电引导信号的接收情况识别充电桩,能够在因充电桩表面是黑色材质或反光材质而带来激光点云稀缺不全的情况下识别出充电桩,不会导致误判,还能继续依靠所述至少两个信号接收器完成回充功能;从而在机器人开始直线对接回充阶段,使用各块探测角区域内的目标激光点的测距数据和充电引导信号的接收情况来弥补激光点云稀缺无法拟合充电桩的有效位姿信息的缺陷,实现对机器人回充场景的优化,形成能够克服充电桩表面材质影响的回充处理手段。克服了单依赖激光或者红外所带来的缺陷,提高机器人主动回充的可靠性与准确性。
4、进一步地,所述根据不同目标激光点之间的测距差异和所述至少两个信号接收器对所述充电引导信号的接收情况,识别出所述充电桩的方法包括:若不同块所述探测角区域内的目标激光点之间的测距差值均处于预设距离误差范围内,且所述至少两个信号接收器同时接收到所述充电引导信号,则确定机器人识别出充电桩,并确定机器人的正前方存在所述充电桩,以控制机器人直线行走至所述充电桩的正前方。因而在确定机器人识别出充电桩后,基于各块所述探测角区域内的目标激光点的测距数据,在机器人的正面安装充电结构的情况下,机器人直线前进至所述充电桩的正前方以实现正面的充电结构对接充电桩,进行充电;也可以在机器人的背面安装充电结构的情况下,机器人先掉头,直线后退至所述充电桩的正前方以实现背面的充电结构对接充电桩,进行充电。
5、进一步地,不同块所述探测角区域内的目标激光点之间的测距差值不是均处于预设距离误差范围内的情况下,存在:将机器人的正前方的一侧所设置的探测角区域内的目标激光点设置为第一目标激光点,将机器人的正前方所设置的探测角区域内的目标激光点设置为第二目标激光点,将机器人的正前方的另一侧所设置的探测角区域内的目标激光点设置为第三目标激光点;若第三目标激光点的测距数据和第二目标激光点的测距数据均大于第一目标激光点的测距数据,则在机器人沿着所述充电桩的正前方中间位置的垂直线行走的过程中,确定第一目标激光点所在一侧的探测角区域内存在障碍物以使机器人无法直线行走至所述充电桩的正前方,且机器人不将障碍物识别为充电桩。从而基于第一目标激光点可以确定障碍物相对于机器人的位置关系,使障碍物阻碍机器人识别出所述充电桩;则后续机器人可以依据第一目标激光点的测距数据调整机器人的位姿以避开障碍物,使机器人检测到不同块所述探测角区域内的目标激光点之间的测距差值均处于预设距离误差范围内,且所述至少两个信号接收器同时接收到所述充电引导信号,在此基础上才实现无障碍地完成直线回充,且能区分充电桩前的障碍物,不会导致误判。
6、进一步地,所述至少两个信号接收器不是同时接收到所述充电引导信号的情况下,确定机器人的前方存在障碍物以使机器人无法直线行走至所述充电桩的正前方,且该障碍物遮挡住所述至少两个信号接收器的部分或全部探测视角。从而在信号接收器没有接收到所述充电引导信号的情况下,根据各块所述探测角区域内的目标激光点的测距数据对障碍物进行定位。从而后续根据所有目标激光点的测距数据计算出障碍物占据位置并通过通过不断调整的自身姿态和运动方位来避开障碍物或重新识别回充电桩。
7、进一步地,每块所述探测角区域内的目标激光点是该块所述探测角区域内距离机器人的机体中心或激光雷达的中心最近的一个激光反射点;其中,激光雷达,用于采集所需识别的表面材质上反射产生的激光反射点并换算出各扫描角度下的激光反射点的测距数据,以表示所需识别的表面材质与机器人之间距离。
8、综上,本技术通过执行前述实施例公开的充电桩识别方法,能够在因充电桩表面是黑色材质或反光材质而带来激光点云稀缺不全的情况下,识别出充电桩,不会导致误判,还能继续依靠所述至少两个信号接收器完成回充功能,因此,在机器人执行回充功能的场景中,使用各块探测角区域内的目标激光点的测距数据和充电引导信号的接收情况来弥补激光点云稀缺无法拟合有效位姿信息的缺陷,实现对机器人回充场景的优化,形成能够克服充电桩表面材质影响的回充处理手段。
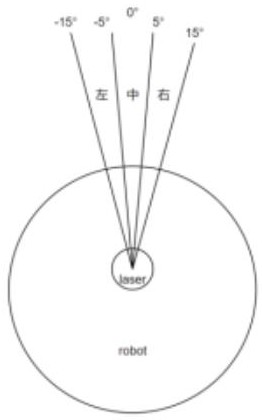
9、进一步地,所述从激光扫描区域内设置至少三块探测角区域的方法包括:在所述激光扫描区域内,以机器人的行走方向为角平分线的指向设置目标探测视角,并以激光雷达的中心为顶点在该目标探测视角均匀地划分出至少三块探测角区域;其中,存在一块探测角区域覆盖到机器人的正面中间位置的垂直线,另外存在至少两块探测角区域分居机器人的行走方向的两侧;其中,机器人的正面方中间位置的垂直线沿着机器人的行走方向延伸;机器人的正前方是由机器人的行走方向表示。从而以激光雷达的中心为顶点在该目标探测视角均匀地划分出三块探测角区域且该三块探测角区域均基于机器人的正面中间位置的垂直线对称,以均匀地探测机器人行走方向两侧分布的目标激光点的测距数据;进而在有限的探测视角范围和探测距离内分区域进行充电桩和障碍物识别。
10、进一步地,机器人位于所述充电桩的正前方中间位置的垂直线上时,所述目标探测视角是激光雷达扫描充电桩所需的最大探测视角,使夹成该最大探测视角所发射的两条激光线分别切过充电桩的两侧面;其中,所述充电桩发出的充电引导信号覆盖到所述充电桩的正前方中间位置的垂直线;所述充电桩的正前方与机器人的正前方是相反;所述充电桩的正前方是用于安装充电结构的位置;其中,所述至少三块探测角区域分布在机器人与充电桩之间;其中,机器人的正面方中间位置的垂直线是预先配置,以表示机器人导航所需的二维坐标系的一坐标轴。从而在所述充电桩的正前方能够被探测的最大范围内确定出起阻挡作用的障碍物相对于机器人的位置关系,更能在所述最大探测视角所覆盖范围比较各块探测角区域内的目标激光点的测距数据差异和检测机器人的信号接收器同时接收信号的情况。
11、进一步地,所述至少三块探测角区域分别为左探测角区域、中间探测角区域和右探测角区域;机器人的正前方所设置的一块探测角区域是中间探测角区域,中间探测角区域覆盖到机器人的正面中间位置的垂直线,以使机器人沿着所述充电桩的正前方中间位置的垂直线行走时探测所述充电桩的正前方中间位置或对应方向上存在的障碍物;机器人的正前方的左侧所设置的一块探测角区域是左探测角区域,左探测角区域位于机器人的行走方向的左侧,以使机器人沿着所述充电桩的正前方中间位置的垂直线行走时探测所述充电桩的左侧或对应方向上存在的障碍物;机器人的正前方的右侧所设置的一块探测角区域是右探测角区域,右探测角区域位于机器人的行走方向的右侧,以使机器人沿着所述充电桩的正前方中间位置的垂直线行走时探测所述充电桩的右侧或对应方向上存在的障碍物。
12、一种芯片,该芯片存储有计算机程序,所述计算机程序是所述充电桩识别方法对应的程序代码。所述芯片控制机器人在行走过程中使用激光雷达扫描周围环境,并根据不同目标激光点之间的测距差异和所述至少两个信号接收器对所述充电引导信号的接收情况,识别出所述充电桩并区分出充电桩与机器人之间的障碍物,提高充电桩识别的准确性;从而在所述芯片控制机器人开始直线对接回充阶段,使用各块探测角区域内的目标激光点的测距数据和充电引导信号的接收情况来弥补激光点云稀缺无法拟合有效位姿信息的缺陷,实现对机器人回充场景的优化,形成能够克服充电桩表面材质影响的回充处理手段。
13、一种机器人,机器人的机体顶部装配激光雷达,机器人的正面用于安装至少两个信号接收器且水平分布在机器人的正面中间位置的垂直线两侧;机器人的内部装配所述芯片;在机器人开始行走为与充电桩进行直线对接的情况下,所述芯片执行所述计算机程序时实现所述充电桩识别方法。本技术公开的机器人通过执行所述充电桩识别方法,能够在因充电桩表面是黑色材质或反光材质而带来激光点云稀缺不全的情况下识别出充电桩,不会导致误判,还能继续依靠所述至少两个信号接收器完成回充功能。
- 还没有人留言评论。精彩留言会获得点赞!